地图处理系统以及地图处理程序
1.相关申请的交叉引用
2.本技术基于在2020年7月10日申请的日本技术号2020-119192号,在此引用其记载内容。
技术领域
3.本公开涉及地图处理系统以及地图处理程序。
背景技术:
4.提供一种地图处理装置,从车辆侧获取探测数据,基于该获取到的探测数据生成输入地图,统合多个输入地图来生成统合输入地图、或者对输入地图进行位置修正来更新基准地图。具体而言,例如生成多个包含地标等特征点的位置信息的输入地图,对该生成的多个输入地图所包含的特征点进行匹配,使多个输入地图重叠生成统合输入地图。另外,对基准地图所包含的特征点和输入地图所包含的特征点进行匹配,使基准地图和输入地图重叠,对输入地图进行位置修正,将基准地图与输入地图的差分反映到基准地图中来更新该基准地图。在像这样生成统合输入地图或者更新基准地图时,优选提高输入地图的精度。例如,在专利文献1中公开了如下方法:在多个地图间设定共用的三点特征点,通过修正由该设定的三点特征点形成的三角形,来提高地图的精度。
5.专利文献1:日本特开2002-341757号公报
6.在上述的专利文献1的方法中,前提是在重叠的多个地图中的任意一个地图中都包含特征点。在该情况下,可能成为特征点的地上物是标志、看板、区划线、道路端的形状点等多种多样,若特征点的个数增大,则相应地匹配特征点时的数据量增大,计算量增大。根据这样的情况,考虑到通过统合多个特征点生成统合特征点,并对统合特征点进行匹配,来减少计算量。
7.在匹配统合特征点的结构中,存在只能够局部地识别统合特征点的情况。若只能够局部地识别统合特征点,则不能将该统合特征点确定为是在多个地图间共用的统合特征点。
技术实现要素:
8.本公开的目的在于,适当地减少匹配特征点时的数据量,并且适当地确定在多个地图间共用的特征点,适当地处理地图。
9.根据本公开的一个方式,特征量计算部计算地图所包含的特征点的特征量。统合特征点生成部统合多个特征点生成统合特征点。若生成统合特征点,则统合特征点匹配部在多个地图间匹配统合特征点。特征点匹配部在多个地图间匹配单独的特征点。地图处理部基于统合特征点的匹配结果和单独的特征点的匹配结果来处理地图。
10.通过统合多个特征点生成统合特征点,在多个地图间匹配统合特征点,能够适当地减少匹配特征点时的数据量。通过在多个地图间匹配统合特征点,接着在多个地图间匹
配单独的特征点,基于统合特征点的匹配结果和单独的特征点的匹配结果来处理地图,能够适当地确定在多个地图间共用的特征点。由此,能够适当地减少匹配特征点时的数据量,并且适当地确定在多个地图间共用的特征点,能够适当地处理地图。
附图说明
11.通过参照附图进行下述的详细的描述,有关本公开的上述目的以及其他的目的、特征、优点变得更加明确。
12.图1是表示一个实施方式的地图处理系统的整体结构的功能框图。
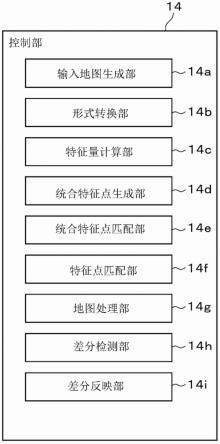
13.图2是服务器中的控制部的功能框图。
14.图3是对生成统合特征点的方式进行说明的图。
15.图4是对匹配统合特征点的方式进行说明的图。
16.图5是表示配置有道路上的标志的方式的图。
17.图6是表示输入地图中的特征点的图。
18.图7是流程图(之一)。
19.图8是流程图(之二)。
20.图9是对排除存在误匹配的可能性的特征点的方式进行说明的图。
具体实施方式
21.以下,参照附图对一个实施方式进行说明。在本实施方式中,针对对基准地图所包含的特征点和输入地图所包含的特征点进行匹配,使基准地图和输入地图重叠,对输入地图进行位置修正,将基准地图与输入地图的差分反映到基准地图中来更新该基准地图的情况进行说明。也能够应用于对多个输入地图所包含的特征点进行匹配,使多个输入地图重叠而生成统合输入地图的情况。即,作为匹配特征点的对象的多个地图可以是基准地图和输入地图,也可以是多个输入地图。
22.如图1所示,地图处理系统1构成为搭载于车辆侧的车载器2和配置于网络侧的服务器3可数据通信。车载器2和服务器3处于多对一的关系,服务器3能够在与多个车载器2之间进行数据通信。
23.车载器2具备控制部4、数据通信部5、图像数据输入部6、定位数据输入部7、传感器数据输入部8以及存储装置9,各功能模块构成为能够经由内部总线10进行数据通信。控制部4由具有cpu(central processing unit:中央处理器)、rom(read only memory:只读存储器)、ram(random access memory:随机存取存储器)以及i/o(input/output:输入/输出)的微型计算机构成。微型计算机执行储存于非过渡性实体存储介质的计算机程序,来执行与计算机程序对应的处理,控制车载器2的全部动作。
24.数据通信部5控制与服务器3之间的数据通信。车载相机11与车载器2分体地设置,拍摄车辆前方,并将该拍摄到的图像数据输出到车载器2。图像数据输入部6若从车载相机11输入图像数据,则将该输入的图像数据输出到控制部4。gnss(global navigation satellite system:全球导航卫星系统)接收机12与车载器2分体地设置,接收从gnss卫星发送的卫星信号并进行定位,将该定位数据输出到车载器2。定位数据输入部7若从gnss接收机12输入定位数据,则将该输入的定位数据输出到控制部4。各种传感器13与车载器2分
体地设置,例如包含毫米波雷达、lidar(light detection and ranging:光探测和测距、laser imaging detection and ranging:激光成像探测和测距)等,将测量的传感器数据输出到车载器2。传感器数据输入部9若从各种传感器13输入传感器数据,则将该输入的传感器数据输出到控制部4。
25.控制部4基于图像数据、定位数据以及传感器数据,对车辆位置、定位该车辆位置的时刻、道路上的标志、看板等地标、区划线的位置等建立对应关系生成探测数据,并使该生成的探测数据存储于存储装置9。此外,探测数据也可以包含道路形状、道路特征、道路宽度等各种信息、位置关系。
26.控制部4例如每当经过规定时间、每当车辆的行驶距离达到规定距离时从存储装置9读出探测数据,使该读出的探测数据从数据通信部5发送到服务器3。所谓的段单位,是在管理地图方面以预先决定的单位划分道路、区域的单位。此外,控制部4也可以以与段单位无关的单位读出探测数据,并使该读出的探测数据从数据通信部5发送到服务器3。所谓的与段单位无关的单位,例如是从服务器3指定的区域的单位。
27.服务器3具备控制部14、数据通信部15以及存储装置16,各功能模块构成为能够经由内部总线17进行数据通信。控制部14由具有cpu、rom、ram以及i/o的微型计算机构成。微型计算机通过执行储存于非过渡性实体存储介质的计算机程序,来执行与计算机程序对应的处理,控制服务器3的全部动作。微型计算机执行的计算机程序中包含地图处理程序。
28.数据通信部15控制与车载器2之间的数据通信。存储装置16具备:存储探测数据的探测数据存储部16a、存储形式转换前的输入地图的输入地图存储部16b、存储形式转换后的输入地图的输入地图存储部16c、存储位置修正后的输入地图的输入地图存储部16d、存储形式转换前的基准地图的基准地图存储部16e、存储形式转换后的基准地图的输入地图存储部16f。输入地图是由后述的输入地图生成部14a基于探测数据生成的地图。基准地图例如是由地图供应商测量现场而生成的地图等。即,如果由于新开通道路等而现场的数据未更新,则根据探测数据生成的输入地图中包含地标、区划线,但与该现场对应的基准地图中不包含地标、区划线。
29.如图2所示,控制部14具备输入地图生成部14a、形式转换部14b、特征量计算部14c、统合特征点生成部14d、统合特征点匹配部14e、特征点匹配部14f、地图处理部14g、差分检测部14h以及差分反映部14i。这些功能模块相当于微型计算机所执行的地图处理程序的处理。
30.若通过数据通信部15接收从车载器2发送的探测数据,则输入地图生成部14a使该接收到的探测数据存储于探测数据存储部16a。即,由于车载器2和服务器3处于多对一的关系,因此控制部14使从多个车载器2接收到的多个探测数据存储于探测数据存储部16a。输入地图生成部14a从探测数据存储部16a读出探测数据,基于该读出的探测数据生成输入地图。
31.在该情况下,如果从车载器2发送的探测数据是段单位,探测数据以段单位存储于探测数据存储部16a,则输入地图生成部14a直接读出存储于探测数据存储部16a的多个探测数据,基于该读出的探测数据生成输入地图。若从车载器2发送的探测数据是与段单位无关的单位,探测数据以与段单位无关的单位存储于探测数据存储部16a,则输入地图生成部14a读出存储于探测数据存储部16a的作为对象的段所包含的多个探测数据,基于该读出的
探测数据生成输入地图。
32.输入地图生成部14a若生成输入地图,则使该生成的输入地图存储于输入地图存储部16b。在该情况下,输入地图生成部14a可以使一个输入地图存储于输入地图存储部16b,也可以统合多个输入地图生成统合输入地图,使该生成的统合输入地图存储于输入地图存储部16b。
33.输入地图生成部14a在统合多个输入地图的情况下,可以使用从不同的车载器2发送出的探测数据,也可以使用从相同的车载器2以时间差发送出的探测数据。另外,输入地图生成部14a考虑到存在不能设定为在多个输入地图间共用的特征点的特征点,优选获取包含尽可能多的特征点的段。即,输入地图生成部14a也可以对段所包含的特征点的个数与规定个数进行比较,将包含规定个数以上的特征点的段作为获取对象,另一方面,将不包含规定个数以上的特征点的段不作为获取对象。另外,输入地图生成部14a也可以判定特征点的检测精度,将包含规定个数以上的检测等级为规定等级以上的特征点的段作为获取对象,另一方面,将不包含规定个数以上的检测等级为规定等级以上的特征点的段不作为获取对象。
34.规定个数、规定等级可以是固定值,也可以是例如根据车辆的行驶位置、行驶环境等决定的可变值。即,当车辆在特征点的个数比较少的地域行驶时,若以较大的值设定规定个数,则存在可能成为获取对象的段过少的担忧,因此优选以较小的值设定规定个数。与此相反,当车辆在特征点的个数比较多的地域行驶时,若以较小的值设定规定个数,则存在可能成为获取对象的段过多的担忧,因此优选以较大的值设定规定个数。对于规定等级也同样,例如在由于气候等的影响而检测环境比较恶劣的环境下,若以较高的等级设定规定等级,则存在可能成为获取对象的段过少的担忧,因此优选以较低的等级设定规定等级。与此相反,在检测环境比较良好的环境下,若以较低的等级设定规定等级,则存在可能成为获取对象的段过多的担忧,因此优选以较高的等级设定规定等级。
35.形式转换部14b读出存储于基准地图存储部16e的基准地图,转换该读出的基准地图的数据形式,使转换该数据形式后的基准地图存储于基准地图存储部16f。形式转换部14b读出存储于输入地图存储部16b的输入地图,转换该读出的输入地图的数据形式,使转换该数据形式后的输入地图存储于输入地图存储部16c。形式转换部14b转换基准地图以及输入地图的数据形式,使基准地图以及输入地图的数据形式一致。
36.特征量计算部14c计算特征点的特征量。特征点的特征量是特征点的种类、尺寸、位置、与周边地上物的位置关系等。如图3所示,统合特征点生成部14d在基准地图中统合多个特征点生成统合特征点,在输入地图中统合多个特征点生成统合特征点。统合多个特征点的条件是:在统合化的组边界内,例如(a)特征点间的距离为10.0米以下,(b)特征点的种类一致,(c)高度方向的尺寸差为1.0米以内,(d)宽度方向的尺寸差为1.0米以内,(e)法线的方位差为45.0度以内等。统合特征点生成部14d在满足这些(a)~(e)所有条件的情况下,生成统合特征点。在图3的例示中,由于基准地图的特征点a1~a3满足(a)~(e)所有条件而统合特征点生成部14d统合特征点a1~a3生成统合特征点,由于输入地图的特征点x1~x3满足(a)~(e)所有条件而统合特征点生成部14d统合特征点x1~x3生成统合特征点。
37.若在基准地图以及输入地图中通过统合特征点生成部14d生成统合特征点,则统合特征点匹配部14e在基准地图与输入地图之间匹配统合特征点。统合特征点匹配部14e判
定:(f)构成统合特征点的特征点数一致,(g)重心间距离为5.0米以下,(h)统合特征点的种类一致,(i)高度方向的尺寸差为1.0米以内,(j)宽度方向的尺寸差为1.0米以内,(k)法线的方位差为45.0度以内等,匹配统合特征点。
38.特征点匹配部14f判定由统合特征点匹配部14e进行的统合特征点的匹配是否成功。如图4所示,若统合了基准地图的特征点a1~a3的统合特征点和统合了输入地图的特征点x1~x3的统合特征点满足(f)~(k)所有条件,则特征点匹配部14f判定为统合特征点的匹配成功。
39.在这里,如图5所示,在现实世界中在道路上密集地设置有标志p1~p5的情况下,若新鲜度不同或车载相机11产生死角,则存在基于探测数据生成的输入地图的统合特征点和基于现实世界的标志p1~p5生成的基准地图的统合特征点不同的情况。如图6所示,存在在输入地图a中正常识别出现实世界的标志p1~p1,但例如在输入地图b中将现实世界的标志p1~p5中的标志p3、p4识别为一个标志p11,在输入地图c中未识别出现实世界的标志p1~p5中的标志p5的情况。
40.在该情况下,若对统合了基准地图中与现实世界的标志p1~p5对应的特征点的统合特征点和在输入地图a中统合了特征点的统合特征点进行匹配,则特征点匹配部14f判定为统合特征点的匹配成功。另一方面,若对统合了基准地图中与现实世界的标志p1~p5对应的特征点的统合特征点和在输入地图b、c中统合了特征点的统合特征点进行匹配,则特征点匹配部14f判定为统合特征点的匹配失败。
41.特征点匹配部14f判定是否存在匹配失败的统合特征点,若判定为存在匹配失败的统合特征点,则将该统合特征点的匹配失败的单独的特征点作为对象,在基准地图与输入地图之间匹配单独的特征点。另外,特征点匹配部14f判定是否存在从生成统合特征点的对象偏离的单独的特征点,若判定为存在从生成统合特征点的对象偏离的单独的特征点,则将该从生成统合特征点的对象偏离的单独的特征点作为对象,在基准地图与输入地图之间匹配单独的特征点。特征点匹配部14f判定:(l)特征点间距离为5.0米以下,(m)特征点的种类一致,(n)高度方向的尺寸差为1.0米以内,(o)宽度方向的尺寸差为1.0米以内等,匹配特征点。
42.地图处理部14g基于统合特征点匹配部14e的统合特征点的匹配结果以及特征点匹配部14f的单独的特征点的匹配结果,基于基准地图对输入地图进行位置修正。即,地图处理部14g使基准地图和输入地图重叠来对输入地图进行位置修正,使得基准地图所包含的特征点和输入地图所包含的特征点重叠。
43.差分检测部14h若判定为至少四个特征点的位置在基准地图与输入地图之间一致,则判定为输入地图的位置修正成功,检测基准地图与输入地图的差分。在该情况下,差分检测部14h将静态信息、动态信息作为差分反映到基准地图中。静态信息是与特征点相关的特征点信息、与区划线相关的区划线信息、地点的位置信息等。特征点信息是表示特征点的位置的位置坐标、识别特征点的id、特征点的尺寸、特征点的形状、特征点的颜色、特征点的种类等。区划线信息是表示区划线的位置的位置坐标、识别区划线的id、虚线、实线的种类等。地点的位置信息是表示道路上的地点的gps坐标等。动态信息是与道路上的车辆相关的车辆信息,例如是车速值、转向灯工作信息、跨车道、舵角值、横摆率值、gps坐标等。若通过差分检测部14h检测出基准地图与输入地图的差分,则差分反映部14i将该检测出的差分
反映到基准地图中来更新该基准地图。
44.接下来,参照图7~图9对上述的结构的作用进行说明。
45.在服务器3中,控制部14若开始输入地图的位置修正处理,则读出存储于基准地图存储部16e的存储地图,读出存储于输入地图存储部16b的输入地图,并转换该读出的基准地图以及输入地图的数据形式,使数据形式一致(s1)。控制部14使转换数据形式后的基准地图存储于基准地图存储部16f,使转换数据形式后的输入地图存储于输入地图存储部16c(s2)。
46.控制部14移至特征点的匹配处理(s3)。控制部14若开始特征点的匹配处理,则计算基准地图以及输入地图所包含的特征点的特征量(s11、相当于特征量计算步骤)。控制部14在基准地图以及输入地图中将多个特征点统合化生成统合特征点(s12、相当于统合特征点生成步骤),在基准地图与输入地图之间匹配统合特征点(s13、相当于统合特征点匹配步骤)。
47.控制部14判定是否存在匹配失败的统合特征点(s14),若存在匹配失败的统合特征点(s14:是),则将该统合特征点的匹配失败的单独的特征点作为对象,在基准地图与输入地图之间匹配单独的特征点(s15)。控制部14判定是否存在从生成统合特征点的对象偏离的单独的特征点(s16),若判定为存在从生成统合特征点的对象偏离的单独的特征点(s16:是),则将该从生成统合特征点的对象偏离的单独的特征点作为对象,在基准地图与输入地图之间匹配单独的特征点(s17)。
48.控制部14从统合特征点的匹配结果和单独的特征点的匹配结果中排除存在误匹配的可能性的统合特征点以及单独的特征点(s18),结束特征点的匹配处理。
49.如图9所示,如果在排除存在误匹配的可能性的统合特征点的情况下,控制部14在基准地图中生成统合特征点a~c,在输入地图中生成统合特征点w~z,输入地图相对于基准地图偏离方位角θ,作为与基准地图的统合特征点c匹配的候补存在统合特征点z、w的情况下,如果ab向量与xy向量的角度差、bc向量与yz向量的角度差、ac向量与xz向量的角度差均等于方位角θ,bc向量与yw向量的角度差、ac向量与xw向量的角度差均不等于方位角θ,则排除存在误匹配的可能性的统合特征点w。控制部14在排除存在误匹配的可能性的单独的特征点的情况下,也与排除上述的统合特征点的情况同样地进行。
50.控制部14若结束特征点的匹配处理,则计算基准地图与输入地图之间的偏置值(s4)。控制部14基于该计算出的偏置值修正输入地图(s5、相当于地图处理步骤),使该修正后的输入地图存储于输入地图存储部16d(s6),结束输入地图的位置修正处理。在此以后,控制部14检测基准地图与输入地图的差分,并将该检测出的差分反映到基准地图中来更新该基准地图。
51.此外,以上对在服务器3中,计算特征点的特征量,将特征点统合化生成统合特征点的情况进行了说明,但也可以在车载器2中,计算特征点的特征量并将计算结果发送到服务器3,或者将特征点统合化并将统合结果发送到服务器3。即,在服务器3与车载器2之间如何分担功能都可以。
52.如以上说明那样,根据本实施方式,能够得到以下所示的作用效果。
53.在服务器3中,通过统合多个特征点生成统合特征点,在基准地图与输入地图之间匹配统合特征点,能够适当地减少匹配特征点时的数据量。通过在基准地图与输入地图之
间匹配统合特征点,接着在基准地图与输入地图之间匹配单独的特征点,基于统合特征点的匹配结果和单独的特征点的匹配结果处理地图,能够适当地确定在基准地图与输入地图之间共用的特征点。由此,能够适当地减少匹配特征点时的数据量,并且适当地确定在基准地图与输入地图之间共用的特征点,能够适当地对输入地图进行位置修正。
54.在服务器3中,将统合特征点的匹配失败的单独的特征点作为对象,在基准地图与输入地图之间匹配单独的特征点。通过匹配统合特征点的匹配失败的单独的特征点,能够增加在基准地图与输入地图之间共用的特征点,能够容易确定共用的特征点。
55.在服务器3中,将从生成统合特征点的对象偏离的单独的特征点作为对象,在多个地图间匹配单独的特征点。通过匹配从生成统合特征点的对象偏离的单独的特征点,能够增加在基准地图与输入地图之间共用的特征点,能够容易确定共用的特征点。
56.本公开以实施例为基准进行了描述,但应理解为并不限定于该实施例、构造。本公开也包含各种变形例、等同范围内的变形。其中,各种组合、方式,进一步仅包含它们中一个要素、一个以上、或一个以下的其他组合、方式也纳入到本公开的范畴、思想范围内。
57.本公开所记载的控制部及其方法也可以通过专用计算机来实现,该专用计算机通过构成被编程为执行利用计算机程序具体化的一个或多个功能的处理器以及存储器来提供。或者,本公开所记载的控制部及其方法也可以通过利用一个以上的专用硬件逻辑电路构成处理器而被提供的专用计算机来实现。或者,本公开所记载的控制部及其方法也可以通过一个以上的专用计算机来实现,该一个以上的专用计算机由被编程为执行一个或多个功能的处理器及存储器和由一个以上的硬件逻辑电路构成的处理器的组合来构成。另外,计算机程序也可以作为由计算机执行的指令存储于计算机可读取的非过渡有形记录介质。
58.例示出在服务器3中,将不包含规定个数以上的特征点的段、不包含规定个数以上的检测等级为规定等级以上的特征点的段不作为获取对象的结构,但也可以在车载器2中,设定将包含段的探测数据发送到服务器3的条件。即,例示出在车载器2中,例如每当经过规定时间、每当车辆的行驶距离达到规定距离时将探测数据发送到服务器3的结构,但也可以为判定段所包含的特征点的检测数,仅在特征点的检测数为规定个数以上的情况下,将探测数据发送到服务器3的结构。即,也可以为例如也有由于存在前车等而特征点的检测数不为规定个数以上的情况,在假定即使将包含特征点的检测数不为规定个数以上的段的探测数据发送到服务器3,服务器3也不将该探测数据作为处理对象而废弃的情况下,不将该探测数据发送到服务器3的结构。通过不从车载器2发送对服务器3而言不必要的探测数据,能够减少数据通信的负荷。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。