1.本技术涉及液体火箭技术领域,尤其涉及一种液体火箭晃动载荷的确定方法、装置及电子设备。
背景技术:
2.在液体火箭的飞行过程中,发动机开关机、推力调节、风切变、阵风以及调姿等外部激励都会引起贮箱内部推进剂的周期性晃动,由于液体晃动的一阶频率较低,且贮箱直径越大,晃动频率越低,接近于刚体截频,可能与控制系统耦合,影响飞行姿态稳定性,同时晃动的推进剂在贮箱壁产生周期性的晃动力,激起箭体低频响应,产生晃动载荷,传统的静载荷处理方式存在一定的局限性。可重复使用火箭为提升重复使用设计性能,如重复使用次数、使用维护性等,需要实现载荷精细化设计,这就需要开展载荷高精度预示,保证晃动载荷计算的准确性是基本前提。
3.目前一种晃动载荷的计算方法是将不同贮箱晃动力幅值作为静态集中力施加于箭体,对不同贮箱集中力进行正负不同的组合以求取各截面的载荷最大值,但此方法存在载荷计算结果偏小的问题;而采取安全系数进行包络的方法则有悖于载荷精细化设计。
技术实现要素:
4.本发明提供了一种液体火箭晃动载荷的确定方法、装置及电子设备,以解决或者部分解决目前液体火箭晃动载荷采用的计算方法存在载荷计算结果偏小的技术问题。
5.第一方面,根据本发明一实施例提供了如下的技术方案:
6.一种液体火箭晃动载荷的确定方法,所述液体火箭包括两个以上的贮箱,所述方法包括:
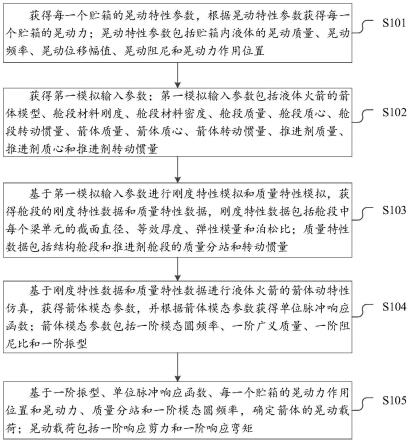
7.获得每一个贮箱的晃动特性参数,根据所述晃动特性参数获得所述每一个贮箱的晃动力;所述晃动特性参数包括贮箱内液体的晃动质量、晃动频率、晃动位移幅值、晃动阻尼和晃动力作用位置;
8.获得第一模拟输入参数;所述第一模拟输入参数包括所述液体火箭的箭体模型、舱段材料刚度、舱段材料密度、舱段质量、舱段质心、舱段转动惯量、箭体质量、箭体质心、箭体转动惯量、推进剂质量、推进剂质心和推进剂转动惯量;
9.基于所述第一模拟输入参数进行刚度特性模拟和质量特性模拟,获得舱段的刚度特性数据和质量特性数据,所述刚度特性数据包括舱段中每个梁单元的截面直径、等效厚度、弹性模量和泊松比;所述质量特性数据包括结构舱段和推进剂舱段的质量分站和转动惯量;
10.基于所述刚度特性数据和所述质量特性数据进行所述液体火箭的箭体动特性仿真,获得箭体模态参数,并根据所述箭体模态参数获得单位脉冲响应函数;所述箭体模态参数包括一阶模态圆频率、一阶广义质量、一阶阻尼比和一阶振型;
11.基于所述一阶振型、所述单位脉冲响应函数、所述每一个贮箱的晃动力作用位置
和晃动力、所述质量分站和所述一阶模态圆频率,确定所述箭体的晃动载荷;所述晃动载荷包括一阶响应剪力和一阶响应弯矩。
12.可选的,所述获得每一个贮箱的晃动特性参数,包括:
13.获得第二模拟输入参数,所述第二模拟输入参数包括所述每一个贮箱的贮箱尺寸、推进剂的初始速度激励、推进剂密度、飞行轴向过载、防晃板尺寸和防晃板位置信息;
14.基于所述第二模拟输入参数进行欧拉多相流仿真,获得所述每一个贮箱在初始速度激励方向上的晃动力时域数据和垂直于初始速度激励平面的晃动力矩时域数据;
15.根据所述晃动力时域数据和所述晃动力矩时域数据,确定所述每一个贮箱的晃动特性参数。
16.可选的,所述基于所述一阶振型、所述单位脉冲响应函数、所述每一个贮箱的晃动力作用位置和晃动力、所述质量分站和所述一阶模态圆频率,确定所述箭体的晃动载荷,包括:
17.基于所述一阶振型、所述单位脉冲响应函数、所述每一个贮箱的晃动力作用位置和晃动力,确定所述箭体的一阶广义位移时域响应数据;
18.基于所述质量分站、所述一阶模态圆频率和所述一阶广义位移时域响应数据,确定所述箭体的晃动载荷;所述晃动载荷包括一阶响应剪力和一阶响应弯矩。
19.可选的,所述基于所述一阶振型、所述单位脉冲响应函数、所述每一个贮箱的晃动力作用位置和晃动力,确定所述箭体的一阶广义位移时域响应数据,包括:
20.基于所述一阶振型、所述每一个贮箱的晃动力作用位置和晃动力,确定所述箭体的一阶广义力时域数据;
21.基于所述单位脉冲响应函数和所述一阶广义力时域数据,确定所述箭体的一阶广义位移时域响应数据。
22.可选的,所述基于所述一阶振型、所述每一个贮箱的晃动力作用位置和晃动力,确定所述箭体的一阶广义力时域数据,包括:
23.基于所述每一个贮箱在所述晃动力作用位置处的一阶振型值,确定所述每一个贮箱的晃动力的正负信息;
24.基于所述一阶振型、所有贮箱的晃动力及对应的正负信息进行加权累加,获得所述箭体的一阶广义力时域数据。
25.可选的,所述基于所述单位脉冲响应函数和所述一阶广义力时域数据,确定所述箭体的一阶广义位移时域响应数据,包括:
26.基于所述单位脉冲响应函数和所述一阶广义力时域数据进行杜哈梅积分,获得所述箭体的一阶广义位移时域响应数据。
27.可选的,所述基于所述质量分站、所述一阶模态圆频率和所述一阶广义位移时域响应数据,确定所述箭体的晃动载荷,包括:
28.基于所述质量分站和所述一阶模态圆频率,确定所述箭体在一阶模态响应下的模态剪力和模态弯矩;
29.基于所述一阶广义位移时域响应数据获得广义位移最大值;
30.基于所述广义位移最大值和所述一阶模态响应下的模态剪力,确定所述箭体的一阶响应剪力;
31.基于所述广义位移最大值和所述一阶模态响应下的模态弯矩,确定所述箭体的一阶响应弯矩。
32.第二方面,根据本发明一实施例提供了如下的技术方案:
33.一种液体火箭晃动载荷的确定装置,所述液体火箭包括两个以上的贮箱,所述装置包括:
34.获取模块,用于获得每一个贮箱的晃动特性参数和第一模拟输入参数,并根据所述晃动特性参数获得所述每一个贮箱的晃动力;所述晃动特性参数包括贮箱内液体的晃动质量、晃动频率、晃动位移幅值、晃动阻尼和晃动力作用位置;所述第一模拟输入参数包括所述液体火箭的箭体模型、舱段材料刚度、舱段材料密度、舱段质量、舱段质心、舱段转动惯量、箭体质量、箭体质心、箭体转动惯量、推进剂质量、推进剂质心和推进剂转动惯量;
35.第一模拟仿真模块,用于基于所述第一模拟输入参数进行刚度特性模拟和质量特性模拟,获得舱段的刚度特性数据和质量特性数据,所述刚度特性数据包括舱段中每个梁单元的截面直径、等效厚度、弹性模量和泊松比;所述质量特性数据包括结构舱段和推进剂舱段的质量分站和转动惯量;
36.第二模拟仿真模块,用于基于所述刚度特性数据和所述质量特性数据进行所述液体火箭的箭体动特性仿真,获得箭体模态参数,并根据所述箭体模态参数获得单位脉冲响应函数;所述箭体模态参数包括一阶模态圆频率、一阶广义质量、一阶阻尼比和一阶振型;
37.确定模块,用于基于所述一阶振型、所述单位脉冲响应函数、所述每一个贮箱的晃动力作用位置和晃动力、所述质量分站和所述一阶模态圆频率,确定所述箭体的晃动载荷;所述晃动载荷包括一阶响应剪力和一阶响应弯矩。
38.第三方面,根据本发明一实施例提供了如下的技术方案:
39.一种电子设备,所述电子设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现第一方面提供的任一项所述方法的步骤。
40.第四方面,根据本发明一实施例提供了如下的技术方案:
41.一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现第一方面提供的任一项所述方法的步骤。
42.通过本发明的一个或者多个技术方案,本发明具有以下有益效果或者优点:
43.本技术提供了一种液体火箭晃动载荷的确定方法,通过基于第一模拟输入参数进行刚度特性模拟和质量特性模拟,获得表征液体火箭舱段弹性状态的刚度特性数据和质量特性数据,然后基于刚度特性数据和质量特性数据进行动特性仿真,获得反映了箭体在弹性影响下的箭体模态参数;然后根据一阶振型、每一个贮箱的晃动力作用位置和晃动力、根据箭体模态参数得到的单位脉冲响应函数、质量分站和一阶模态圆频率计算箭体的晃动载荷。由于在动特性仿真过程中考虑了箭体弹性的影响,因此本方案得到的液体火箭的晃动载荷计算结果大于传统方案,更接近液体火箭在飞行过程中的实际状态,使晃动载荷的计算结果具有更高的精度。
44.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
45.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。
46.在附图中:
47.图1示出了根据本发明实施例提供的液体火箭晃动载荷的确定方法的流程示意图;
48.图2示出了根据本发明实施例提供的四贮箱构型的液体火箭的一阶振型与晃动力的位置关系和正负取值;
49.图3示出了根据本发明实施例提供的一阶广义力时域数据的曲线图;
50.图4示出了根据本发明实施例提供的一阶广义位移时域数据的曲线图;
51.图5示出了根据本发明实施例提供的本技术方案与传统方案计算的晃动载荷对比;
52.图6示出了根据本发明实施例提供的液体火箭晃动载荷的确定装置示意图;
53.图7示出了根据本发明实施例提供的电子设备示意图;
54.图8示出了根据本发明实施例提供的存储介质示意图。
具体实施方式
55.为了使本技术所属技术领域中的技术人员更清楚地理解本技术,下面结合附图,通过具体实施例对本技术技术方案作详细描述。在整个说明书中,除非另有特别说明,本文使用的术语应理解为如本领域中通常所使用的含义。因此,除非另有定义,本文使用的所有技术和科学术语具有与本发明所属领域技术人员的一般理解相同的含义。若存在矛盾,本说明书优先。除非另有特别说明,本发明中用到的各种设备等,均可通过市场购买得到或者可通过现有方法制备得到。
56.研究表明,晃动载荷的传统计算方法:“将不同贮箱晃动力幅值作为静态集中力施加于箭体,对不同贮箱集中力进行正负不同的组合以求取各截面的载荷最大值”得到的载荷计算结果之所以偏小,是因为此方法只考虑了箭体刚体特性。目前晃动领域的研究主要集中在晃动模型和晃动特性参数辨识等方面,而晃动引起的箭体低频响应动载荷暂无相关文献资料支撑,对在已获取晃动特性参数情况下计算晃动载荷的快速迭代方法提出了需求。
57.基于上述研究基础,第一方面,在一个可选的实施例中,如图1所示,提供了一种液体火箭晃动载荷的确定方法,其中,液体火箭为多贮箱液体火箭,包括两个以上的贮箱,具体是至少一个氧化剂贮箱和至少一个燃烧剂贮箱。确定方法包括步骤s101~s106,具体如下:
58.s101:获得每一个贮箱的晃动特性参数,根据所述晃动特性参数获得所述每一个贮箱的晃动力;所述晃动特性参数包括贮箱内液体的晃动质量、晃动频率、晃动位移幅值、晃动阻尼和晃动力作用位置。
59.具体的,晃动特性参数为每一个贮箱在一阶晃动等效力学模型中的特性参数,令贮箱的数量为n(典型的n=4),贮箱内的液体为燃烧剂或氧化剂,那么一个贮箱的晃动特性
参数包括该贮箱内液体的:晃动质量m
hk
、晃动频率ω
hk
、晃动位移幅值x
hk
、晃动阻尼ζ
hk
和晃动力作用位置hk,k表示n个贮箱中的第k个贮箱。
60.获得晃动特性参数的方法可以是基于流体体积的多相流(volume of fluid,vof)仿真,常用的方案为欧拉多相流仿真,具体如下:
61.获得第二模拟输入参数,所述第二模拟输入参数包括所述每一个贮箱的贮箱尺寸、推进剂的初始速度激励、推进剂密度、飞行轴向过载、防晃板尺寸和防晃板位置信息;基于所述第二模拟输入参数进行欧拉多相流仿真,获得所述每一个贮箱在初始速度激励方向上的晃动力时域数据和垂直于初始速度激励平面的晃动力矩时域数据;根据所述晃动力时域数据和所述晃动力矩时域数据,确定所述每一个贮箱的晃动特性参数。
62.具体的,第二模拟输入参数是进行vof模拟时的输入参数。在实施时可以借助流固耦合仿真软件,如starccm 或其它的类似软件实施vof方法进行推进剂晃动过程的模拟仿真,输出液体作用于壁面(沿激励方向)的晃动力的时域数据以及作用于贮箱底部(垂直于激励平面)的晃动力矩的时域数据。
63.接着,可采用非线性最小二乘拟合法进行数据处理,基于晃动力时域数据和晃动力矩时域数据辨识出每一个贮箱的一阶晃动等效力学模型的特性参数作为晃动特性参数。
64.考虑到在初始波高激励作用下,晃动力是指数衰减的变化形式,因此在获得晃动特性参数后,对应的每一个贮箱的晃动力fk为:
[0065][0066]
上式中t为时间。
[0067]
s102:获得第一模拟输入参数;所述第一模拟输入参数包括所述液体火箭的箭体模型、舱段材料刚度、舱段材料密度、舱段质量、舱段质心、舱段转动惯量、箭体质量、箭体质心、箭体转动惯量、推进剂质量、推进剂质心和推进剂转动惯量。
[0068]
s103:基于所述第一模拟输入参数进行刚度特性模拟和质量特性模拟,获得舱段的刚度特性数据和质量特性数据,所述刚度特性数据包括舱段中每个梁单元的截面直径、等效厚度、弹性模量和泊松比;所述质量特性数据包括结构舱段和推进剂舱段的质量分站和转动惯量;其中,质量分站mi是指在将连续箭体质量离散化后,得到每间隔设定距离的集中质量,集中质量的数值和对应位置组成质量分站信息。
[0069]
s104:基于所述刚度特性数据和所述质量特性数据进行所述液体火箭的箭体动特性仿真,获得箭体模态参数,并根据所述箭体模态参数获得单位脉冲响应函数;所述箭体模态参数包括一阶模态圆频率、一阶广义质量、一阶阻尼比和一阶振型。
[0070]
具体的,s102~s104是对液体火箭箭体的动特性的模拟仿真。第一模拟输入参数为进行刚度特性模拟和质量特性模拟的输入参数。在辨识出晃动特性参数的同时,在有限元软件中建立仿真模型,基于第一模拟输入参数,通过有限元软件中的质量集中单元和梁单元模拟舱段刚度特性和质量特性,其中液体火箭箭体的主体舱段采用梁单元进行模拟,梁单元质量特性采用集中质量模拟;推进剂质量特性通过耦合质量模拟。通过建立箭体的动特性模型,开展模态分析仿真,提取出箭体模态参数。
[0071]
有限元仿真软件可以采用航空航天领域常用的分析软件:partran/nastran,以此为例,在具体实施时,对于梁单元,其刚度特性取决于梁单元的材料和截面属性(包括截面积、惯性矩和极惯性矩)。在定义partran/nastran中的cbeam单元的截面属性时,可通过
pbeaml卡片或pbeam卡片两种定义方式实现。箭体结构质量特性包括各个舱段的平动质量以及转动惯量,模拟方法是沿着箭体建立一系列集中质量单元(conm2单元)。液体推进剂在进行动特性有限元建模时,只考虑其质量特性的模拟,采用partran/nastran中的耦合质量单元(conm1单元)建立推进剂模型。
[0072]
接下来以刚度特性数据和质量特性数据作为输入进行箭体动特性的模态分析仿真,可采用有限元软件提供的实特征值求解器(如nastran的sol103)进行模态分析(normal modes),输出箭体模态参数,包括:一阶模态圆频率ω1、一阶广义质量m1、一阶阻尼比ζ1和一阶振型并基于箭体模态参数获得箭体在一阶模态空间下单自由度系统的单位脉冲响应函数h(t),其表达式如下:
[0073][0074]
上式中的ωd为自然频率,表达式如下:
[0075][0076]
通过步骤s102~s104,将液体火箭的晃动载荷计算转化为模态空间下以火箭一阶模态参数作为单自由度系统输入的一阶广义位移h(t)的求解问题,有利于提高晃动载荷的计算精度。
[0077]
接下来:
[0078]
s105:基于所述一阶振型、所述单位脉冲响应函数、所述每一个贮箱的晃动力作用位置和晃动力、所述质量分站和所述一阶模态圆频率,确定所述箭体的晃动载荷;所述晃动载荷包括一阶响应剪力和一阶响应弯矩。
[0079]
具体的,可基于所述一阶振型、所述单位脉冲响应函数、所述每一个贮箱的晃动力作用位置和晃动力,确定所述箭体的一阶广义位移时域响应数据。
[0080]
具体的,可根据一阶振型和每一个贮箱的晃动力作用位置hk和晃动力fk,可确定具有多贮箱结构的箭体的一阶广义力时域数据。然后基于所述单位脉冲响应函数和所述一阶广义力时域数据,确定所述箭体的一阶广义位移时域响应数据。
[0081]
考虑到载荷计算是基于最大载荷的原则进行的,因此为计算获得最大的一阶广义力,可基于所述每一个贮箱在所述晃动力作用位置处的一阶振型值,确定所述每一个贮箱的晃动力的正负信息;基于所述一阶振型、所有贮箱的晃动力及对应的正负信息进行加权累加,获得所述箭体的一阶广义力时域数据。
[0082]
具体的,根据一阶振型和晃动力的正负信息或正负关系,确定晃动力的正负排列,从而确定出由全部贮箱的、带符号的晃动力f
hk
组成的列向量{f},然后采用振型加权累加的方法得到一阶广义力时域数据f1(t),其表达式为:
[0083][0084]
上式中的为一阶振型的转置矩阵。
[0085]
接下来,基于式(4)获得的一阶广义力时域数据f1(t)和式(2)获得的单位脉冲响应函数h(t),基于杜哈梅积分获得所述箭体的一阶广义位移时域响应数据q1(t)。杜哈梅积分的实质是基于单位脉冲响应函数h(t)的卷积过程,其数学表达如下:
[0086][0087]
上式中的τ为积分变量。
[0088]
考虑到一阶广义力形式未知,式(5)无具体理论解答,其算法可通过matlab平台下的lsim函数实现。
[0089]
在获得一阶广义位移时域响应数据q1(t)之后,接下来基于所述质量分站、所述一阶模态圆频率和所述一阶广义位移时域响应数据,确定所述箭体的晃动载荷;所述晃动载荷包括一阶响应剪力和一阶响应弯矩。
[0090]
首先,根据箭体的质量分站mi、一阶模态圆频率ω1和质量分站处的一阶振型值可确定箭体在一阶模态响应下的模态剪力q1(xn)和模态弯矩m1(xn),具体如下:
[0091][0092][0093]
上式中,xn和xi表示质量分站mi的位置坐标,即载荷计算截面的坐标。
[0094]
接着,根据式(5)获得的一阶广义位移时域数据q1(t)求取最大值q
1max
,一种可选的方案是对一阶广义位移时域q1(t)进行概率统计,得到99%概率下的最大值;另一种可选的方案是采用求函数极值的方法求解q1(t)的极大值。
[0095]
然后,基于所述广义位移最大值q
1max
和所述一阶模态响应下的模态剪力q1(xn),确定所述箭体的一阶响应剪力q(x),具体如下:
[0096]
q(x)=q1(xn)
·q1max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0097]
基于所述广义位移最大值q
1max
和所述一阶模态响应下的模态弯矩m1(xn),确定所述箭体的一阶响应弯矩m(x),具体如下:
[0098]
m(x)=m1(xn)
·q1max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0099]
箭体的一阶响应剪力q(x)和一阶响应弯矩m(x)即为本技术所求的液体火箭的晃动载荷。
[0100]
本实施例提供了一种液体火箭晃动载荷的确定方法,通过基于第一模拟输入参数进行刚度特性模拟和质量特性模拟,获得表征液体火箭舱段弹性状态的刚度特性数据和质量特性数据,然后基于刚度特性数据和质量特性数据进行动特性仿真,获得反映了箭体在弹性影响下的箭体模态参数;然后根据一阶振型、每一个贮箱的晃动力作用位置和晃动力、根据箭体模态参数得到的单位脉冲响应函数、质量分站和一阶模态圆频率计算箭体的晃动载荷。由于在动特性仿真过程中考虑了箭体弹性的影响,因此本方案得到的液体火箭的晃动载荷计算结果大于传统方案,更接近液体火箭在飞行过程中的实际状态,使晃动载荷的计算结果具有更高的精度。
[0101]
在接下来的实施例中,为了直观起见,结合具体实施数据对上述方案进行进一步的说明:
[0102]
以四贮箱结构的液体火箭为例,首先基于欧拉多相流的vof方法对防晃板设计及贮箱底非平底带来的非线性问题进行建模,仿真平台采用starccm ,贮箱的壁面作刚性壁
面处理,将流体计算域画成六面体网格;设置流动状态为层流,时间离散格式为2阶,时间步长0.01s,并根据晃动力收敛情况设置每个时间步内的迭代步数。仿真输入使用推进剂的初始速度激励,输出沿激励方向的晃动力时域数据与垂直于激励平面方向上的晃动力矩时域数据,然后经过通数据处理辨识出每一个贮箱内液体的晃动特性参数,包括:晃动质量m
hk
、晃动频率ω
hk
、晃动位移幅值x
hk
、晃动阻尼ζ
hk
和晃动力作用位置hk,并根据晃动特性参数获得晃动力fk。
[0103]
通过质量集中单元和梁单元模拟舱段刚度特性和质量特性,推进剂质量特性通过耦合质量模拟,不考虑推进剂的刚度特性,建立箭体的动特性模型,开展模态分析仿真。仿真平台采用msc.patran/nastran软件,前者作为有限元分析的前处理软件,用于有限元模型的建立,后者作为动特性分析软件,利用其sol103(实特征值求解器)进行模态分析计算,提取箭体模态参数,包括:一阶模态圆频率ω1、一阶广义质量m1、一阶阻尼比ζ1和一阶振型基于箭体模态参数和式(2),得到箭体在一阶模态空间下单自由度系统的单位脉冲响应函数h(t)。
[0104]
为得到广义力的较大值,结合一阶振型的特点,晃动力fk的符号应与晃动力作用位置hk处的一阶振型值保持同号。在本实施例中,请参阅图2,二级甲烷箱处的一阶振型的值为正,则二级甲烷箱的晃动力取正;同理确定二级氧箱、一级甲烷箱晃动力取正,一级氧箱晃动力取负;基于式(4),通过振型加权累加后得到单自由度系统的一阶广义力时域数据f1(t),f1(t)的曲线示意可参阅图3。
[0105]
基于matlab平台的lsim函数,可实现对线性时不变模型在任意输入下的输出计算;其中,箭体模态参数为lsim函数的输入,实现对广义力作用下的广义位移时域数据q1(t)的求解,并提取广义位移最大值q
1max
;广义位移时域数据q1(t)的曲线示意可参阅图4。
[0106]
模态剪力、弯矩可通过理论计算公式(6)和(7)实现,也可以在模态分析计算结果中提取,接下来根据广义位移最大值q
1max
、一阶模态响应下的模态剪力q1(xn)和弯矩m1(xn),采用式(8)和式(9)得到最终的晃动载荷。
[0107]
图5中示出了本实施例提出的计算方法和传统方法:“将不同贮箱晃动力幅值作为静态集中力施加于箭体,对不同贮箱集中力进行正负不同的组合以求取各截面的载荷最大值”计算出的晃动载荷的对比;其中,横坐标为质量分站,纵坐标为一阶响应弯矩,单位为105n
·
m。可以看出,采用本实施例提供的计算方法得到的晃动载荷更大,更接近液体火箭飞行过程中的实际工况。
[0108]
总的来说,本实施例在已获取相关晃动特性参数的情况下,提供一种快速的多贮箱液体火箭晃动载荷计算方法,在实现载荷精细化设计目的的同时,满足了项目快速迭代论证的需求。
[0109]
第二方面,基于相同的发明构思,请参阅图6,提供了一种液体火箭晃动载荷的确定装置,包括:
[0110]
获取模块610,用于获得每一个贮箱的晃动特性参数和第一模拟输入参数,并根据所述晃动特性参数获得所述每一个贮箱的晃动力;所述晃动特性参数包括贮箱内液体的晃动质量、晃动频率、晃动位移幅值、晃动阻尼和晃动力作用位置;所述第一模拟输入参数包括所述液体火箭的箭体模型、舱段材料刚度、舱段材料密度、舱段质量、舱段质心、舱段转动惯量、箭体质量、箭体质心、箭体转动惯量、推进剂质量、推进剂质心和推进剂转动惯量;
[0111]
第一模拟仿真模块620,用于基于所述第一模拟输入参数进行刚度特性模拟和质量特性模拟,获得舱段的刚度特性数据和质量特性数据,所述刚度特性数据包括舱段中每个梁单元的截面直径、等效厚度、弹性模量和泊松比;所述质量特性数据包括结构舱段和推进剂舱段的质量分站和转动惯量;
[0112]
第二模拟仿真模块630,用于基于所述刚度特性数据和所述质量特性数据进行所述液体火箭的箭体动特性仿真,获得箭体模态参数,并根据所述箭体模态参数获得单位脉冲响应函数;所述箭体模态参数包括一阶模态圆频率、一阶广义质量、一阶阻尼比和一阶振型;
[0113]
确定模块640,用于基于所述一阶振型、所述单位脉冲响应函数、所述每一个贮箱的晃动力作用位置和晃动力、所述质量分站和所述一阶模态圆频率,确定所述箭体的晃动载荷;所述晃动载荷包括一阶响应剪力和一阶响应弯矩。
[0114]
可选的,所述获取模块610用于:
[0115]
获得第二模拟输入参数,所述第二模拟输入参数包括所述每一个贮箱的贮箱尺寸、推进剂的初始速度激励、推进剂密度、飞行轴向过载、防晃板尺寸和防晃板位置信息;
[0116]
基于所述第二模拟输入参数进行欧拉多相流仿真,获得所述每一个贮箱在初始速度激励方向上的晃动力时域数据和垂直于初始速度激励平面的晃动力矩时域数据;
[0117]
根据所述晃动力时域数据和所述晃动力矩时域数据,确定所述每一个贮箱的晃动特性参数。
[0118]
可选的,所述确定模块640用于:
[0119]
基于所述一阶振型、所述单位脉冲响应函数、所述每一个贮箱的晃动力作用位置和晃动力,确定所述箭体的一阶广义位移时域响应数据;
[0120]
基于所述质量分站、所述一阶模态圆频率和所述一阶广义位移时域响应数据,确定所述箭体的晃动载荷;所述晃动载荷包括一阶响应剪力和一阶响应弯矩。
[0121]
进一步的,所述确定模块640用于:
[0122]
基于所述一阶振型、所述每一个贮箱的晃动力作用位置和晃动力,确定所述箭体的一阶广义力时域数据;
[0123]
基于所述单位脉冲响应函数和所述一阶广义力时域数据,确定所述箭体的一阶广义位移时域响应数据。
[0124]
进一步的,所述确定模块640用于:
[0125]
基于所述每一个贮箱在所述晃动力作用位置处的一阶振型值,确定所述每一个贮箱的晃动力的正负信息;
[0126]
基于所述一阶振型、所有贮箱的晃动力及对应的正负信息进行加权累加,获得所述箭体的一阶广义力时域数据。
[0127]
进一步的,所述确定模块640用于:
[0128]
基于所述单位脉冲响应函数和所述一阶广义力时域数据进行杜哈梅积分,获得所述箭体的一阶广义位移时域响应数据。
[0129]
进一步的,所述确定模块640用于:
[0130]
基于所述质量分站和所述一阶模态圆频率,确定所述箭体在一阶模态响应下的模态剪力和模态弯矩;
[0131]
基于所述一阶广义位移时域响应数据获得广义位移最大值;
[0132]
基于所述广义位移最大值和所述一阶模态响应下的模态剪力,确定所述箭体的一阶响应剪力;
[0133]
基于所述广义位移最大值和所述一阶模态响应下的模态弯矩,确定所述箭体的一阶响应弯矩。
[0134]
第三方面,基于前述实施例相同的发明构思,在又一个可选的实施例中,如图7所示,提供了一种电子设备700,包括处理器720和存储器710,所述存储器710耦接到所述处理器720,所述存储器710存储计算机程序711,当所述计算机程序711由所述处理器720执行时使所述电子设备700执行第一方面实施例提供的确定方法的步骤。
[0135]
第四方面,基于前述实施例相同的发明构思,在又一个可选的实施例中,如图8所示,提供了一种计算机可读存储介质800,其上存储有计算机程序811,该程序被处理器执行时实现第一方面实施例提供的所述确定方法的步骤。
[0136]
通过本发明的一个或者多个实施例,本发明具有以下有益效果或者优点:
[0137]
本实施例提供了一种液体火箭晃动载荷的确定方法、装置、电子设备及存储介质,通过基于第一模拟输入参数进行刚度特性模拟和质量特性模拟,获得表征液体火箭舱段弹性状态的刚度特性数据和质量特性数据,然后基于刚度特性数据和质量特性数据进行动特性仿真,获得反映了箭体在弹性影响下的箭体模态参数;然后根据一阶振型、每一个贮箱的晃动力作用位置和晃动力、根据箭体模态参数得到的单位脉冲响应函数、质量分站和一阶模态圆频率计算箭体的晃动载荷。由于在动特性仿真过程中考虑了箭体弹性的影响,因此本方案得到的液体火箭的晃动载荷计算结果大于传统方案,更接近液体火箭在飞行过程中的实际状态,使晃动载荷的计算结果具有更高的精度。
[0138]
尽管已描述了本技术的优选实施例,但本领域内的普通技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。
[0139]
显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
