基于soc约束的储能装置模糊自适应虚拟惯性控制方法
技术领域
1.本发明涉及一种储能装置模糊自适应虚拟惯性控制方法,涉及一种基于soc约束的储能装置模糊自适应虚拟惯性控制方法,属于控制技术领域。
背景技术:
2.随着以光伏、风电为主的分布式电源的应用,结合“双碳”目标的快速推进,大量分布式电源通过电力电子器件接入电力系统,分布式电源具有响应速度快等优点,但是本身缺不具备同步发电机的旋转惯性,电力电子渗透率的增加势必会降低电力系统的惯量阻尼特性,为了提升对电网稳定性的支持,模糊自适应虚拟同步发电机技术是解决这一问题的有效途径,目的是通过模拟励磁调节器及频率调节器,结合模糊控制算法,模拟同步发电机的转子特性,相较于传统虚拟同步发电机,模糊自适应虚拟惯性控制可动态调节惯量阻尼参数,以此来适应不同的运行工况。
3.由于频率波动会影响系统的运行稳定性,为了减小这一因素带来的不利影响,目前采用模糊自适应虚拟惯量控制策略,以双约束频率变化量和频率变化率为反馈参数来调节虚拟惯量j,从而减小系统的频率变化量和频率变化速度,使系统保持稳定。除此之外,评价一个系统的稳定性还需要考虑其他的指标,比如储能的充放电极限、换流器容量、系统瞬时交换功率、硬件传输延时等。实践证明,已有的双约束虚拟惯量控制无法避免蓄电池深度过充和过放,严重影响蓄电池的使用寿命,因此探究考虑储能荷电状态(state of charge,soc)约束的虚拟同步机控制方法,对提高电网的稳定性具有重要意义。
技术实现要素:
4.发明的目的是提供一种基于soc约束的储能装置模糊自适应虚拟惯性控制方法。
5.为解决上述技术问题,本发明采用的技术方案是:
6.一种基于soc约束的储能装置模糊自适应虚拟惯性控制方法,包括以下步骤:
7.步骤1:建立同步发电机的一次调频方程:
[0008][0009]
其中,j为虚拟转动惯量,pm为有功功率设定值,pe为vsg单元输出的有功功率测量值,θ为相位角,ω0为角频率参考值,ω为实际角速度,d
p
为阻尼系数;
[0010]
步骤2:根据蓄电池荷电状态将系统的工作状态划分为五段,分别为蓄电池深度过放段、蓄电池过度放电段、蓄电池正常工作段、蓄电池过度充电段、蓄电池深度过充段,具体表达式为:
[0011][0012]
式中soc为蓄电池工作状态下瞬时荷电状态,a和d分别为蓄电池深度放电极限值和深度充电极限值,b和c为过度放电极限值和过度充电极限值;
[0013]
步骤3:建立模糊自适应vsg控制规则:选取频率变化量e和频率变化率ed为模糊变量,输出变量为虚拟转动惯量j:
[0014][0015]
其中,f0为频率额定值,f为电网的频率;
[0016]
ef为频率变化量义e对应的模糊子集,在集合{nb,ns,z,ps,pb}中取值,即{负大,负小,零,正小,正大};edf为频率变化率ed对应的模糊子集,在{mb,ms,n,rs,rb}中取值,即{负大,负小,零,正小,正大};虚拟转动惯量j对应的模糊子集为jf,在{ps,s,m,pb,sb}中取值,即{负大,负小,零,正小,正大};阻尼系数d
p
对应的模糊子集为df,在{qb,qs,l,ts,tb}中取值,即{负大,负小,零,正小,正大};
[0017]
所述系统虚拟惯量j、阻尼系数d
p
和soc约束条件之间的关系为:
[0018][0019][0020]
式中,soc为蓄电池工作状态下瞬时荷电状态,a和d分别为蓄电池深度放电极限值和深度充电极限值,b和c为过度放电极限值和过度充电极限值。j0、j1、j2、j3、j4分别是各个阶段的虚拟惯量,d0、d1、d2、d3、d4分别是各个阶段的阻尼系数;所述虚拟惯量j1、j2、j3和阻尼系数d1、d2、d3根据各参数对系统稳定性的影响、系统稳定运行边界等确定,虚拟惯量j包括j1、j2、j3和阻尼系数d
p
的模糊规则表如表1和表2所示。
[0021]
进一步,a=0.2,b=0.4,c=0.6,d=0.8,将输入的频率变化量e和频率变化率ed的范围设定为[-0.5,0.5],输出变量j的范围设定为[0,10/pi,40/pi,60/pi,80/pi,100/pi],d
p
的范围设定为[0,600/pi,1200/pi,1800/pi,2400/pi,3000/pi]固定参数控制下虚
拟惯量保持10/pi,阻尼系数保持1200/pi。
[0022]
采用上述技术方案,本发明的有益效果是:
[0023]
1.本发明增加了模糊控制环节,考虑系统频率变化量、系统频率变化率以及soc约束来调节j和d
p
的大小,从而提高系统频率的稳定性,避免蓄电池进入深度过放和过充区。
[0024]
2.本发明可以有效提供惯量支撑,频率动态响应较好。
[0025]
3.本发明能够有效减缓蓄电池的出力,避免蓄电池深度充放电,而且在负荷随机波动时可以选取合理的j和d
p
值,系统的动态响应较优。
附图说明
[0026]
下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0027]
图1为本发明的实施例1含vsg单元的三端网络拓扑结构图;
[0028]
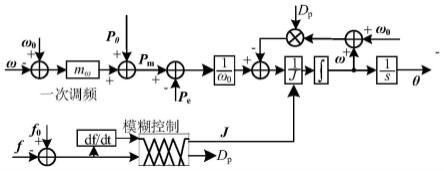
图2为本发明的实施例1vsg单元有功-频率控制结构图;
[0029]
图3为本发明的实施例1系统频率的变化曲线图;
[0030]
图4为本发明的实施例1蓄电池的荷电状态soc的变化曲线图;
[0031]
图5为本发明的实施例1系统频率的变化曲线图;
[0032]
图6为本发明的实施例1蓄电池的荷电状态soc的变化曲线图。
具体实施方式
[0033]
实施例1:
[0034]
本实施例中的含vsg单元的三端网络如图1所示,主要由发电机组sg1、sg2、蓄电池vsg单元以及有功负荷1、2、3组成。其中发电机组是传统的发电单元,可为电网提供电能及二次调频;蓄电池vsg单元作为本发明所述控制方法的实施对象;交流负荷是电网中的负荷单元,用来模拟实际电网中的用电单元。发电机sg1用于二次调频,发电机sg2用于发出恒定功率,储能蓄电池连接逆变器,逆变器2采用vsg控制策略,其中的有功-频率控制环采用下垂控制方法,主控参数为系统虚拟惯量j和d
p
,反映了整个系统旋转惯量的大小和阻尼系数的大小,通过系统频率变化量、频率变化率以及soc约束条件实时改变j的大小进而调节系统稳定性。
[0035]
图2给出了本发明中改进后的vsg单元中有功-频率控制环节,增加了模糊控制环节,考虑系统频率变化量、系统频率变化率以及soc约束来调节j和d
p
的大小,从而提高系统频率的稳定性,避免蓄电池进入深度过放和过充区。如图2所示,本发明中vsg单元的有功-频率控制环节将多个约束条件作为调节虚拟惯量j和阻尼系数d
p
的依据,进而调整系统有功功率特性。有功-功率控制表示为
[0036][0037]
其中,j为虚拟转动惯量,pm为有功功率设定值,pe为vsg单元输出的有功功率测量值,θ为相位角,ω0为角频率参考值,ω为实际角速度,d
p
为阻尼系数,s表示拉普拉斯变换的复频率,f为系统频率,f0为系统频率,df/dt为频率变化率。可以看出,系统频率f的变化会
影响换流器的有功输出功率,反之,有功功率的变化也会反过来影响系统频率f的变化,j的存在会直接降低频率的变化速度,进而给系统提供了惯性支撑。
[0038]
本发明根据蓄电池荷电状态将系统的工作状态划分为五段,分别为蓄电池深度过放段、蓄电池过度放电段、蓄电池正常工作段、蓄电池过度充电段、蓄电池深度过充段,具体表达式为:
[0039][0040]
式中soc为蓄电池工作状态下瞬时荷电状态,a和d分别为蓄电池深度放电极限值和深度充电极限值,b和c为过度放电极限值和过度充电极限值。
[0041]
五段工作状态对应的j、d
p
与各约束之间的关系用来调节j、d
p
,从而调节系统输出有功-频率的安全稳定性,避免蓄电池深度过充或过放以及频率越限而停机,j、d
p
与各约束之间的关系为
[0042][0043][0044]
式中,soc为蓄电池工作状态下瞬时荷电状态,a和d分别为蓄电池深度放电极限值和深度充电极限值,b和c为过度放电极限值和过度充电极限值。j0、j1、j2、j3、j4分别是各个阶段的虚拟惯量,d0、d1、d2、d3、d4分别是各个阶段的阻尼系数。
[0045]
上述考虑soc约束的虚拟发电机控制方法,所述虚拟惯量j1、j2、j3和阻尼系数d1、d2、d3根据各参数对系统稳定性的影响、系统稳定运行边界等确定,虚拟惯量j包括j1、j2、j3和阻尼系数d
p
的模糊规则表如表1和表2所示。
[0046]
其中,{nb,ns,z,ps,pb}对应e的{负大,负小,零,正小,正大};{mb,ms,n,rs,rb}对应ed的{负大,负小,零,正小,正大};{ps,s,m,pb,sb}对应j的{负大,负小,零,正小,正大},{qb,qs,l,ts,tb}对应d
p
的{负大,负小,零,正小,正大}。
[0047]
当0≤soc《a时,蓄电池处于深度过放状态,减轻蓄电池的有功出力,需要根据蓄电池的soc与虚拟惯量j以及阻尼系数d
p
的关系来调整j和d
p
,从而减小vsg单元有功变化量,也即是蓄电池的有功出力,避免蓄电池深度过放。
[0048]
当a≤soc《b时,蓄电池处于过度放电状态,此时如果短时间内为了平抑频率波动,
蓄电池应该继续增大出力。
[0049]
当b≤soc《c时,蓄电池处于正常工作状态,此时考虑频率变化量、频率变化率的影响,调节j和d
p
的大小,从而改变vsg单元输出功率的大小,间接改变系统频率变化率,提高了系统频率稳定性。
[0050]
当c≤soc《d时,蓄电池处于过度充电状态,此时如果短时间内为了平抑频率波动,蓄电池应该继续吸收功率。
[0051]
当d≤soc《1时,蓄电池处于深度过充状态,减轻蓄电池的充电深度,需要根据蓄电池的soc与虚拟惯量j以及阻尼系数d
p
的关系来调整j和d
p
,从而减小vsg单元有功变化量,也即是进入蓄电池的有功功率,避免蓄电池深度过充。
[0052]
本发明所述虚拟惯量j0、j1、j2、j3、j4和阻尼系数d0、d1、d2、d3、d4根据各参数对系统稳定性的影响、系统稳定运行边界等确定。首先考虑“深度过放”或“深度过充”区,这两个区间内已经接近达到蓄电池的运行极限,能提供的功率和吸收的功率很小,也就意味着δp的取值理应很小,由下式知为了避免出现短时间内的频率小波动而造成功率大波动,j的取值应尽量取小。工况2,当蓄电池处于“过度放电”或“过度充电”的状态时,此时如果短时间内为了平抑频率波动,蓄电池应该继续增大出力或者增加吸收功率,同样由下式可知,此时应该选取较大的虚拟惯量j值来达到这种效果,以保持系统的频率稳定。
[0053][0054]
本实施例中,蓄电池采用考虑soc约束的模糊自适应vsg控制策略,取a=0.2,b=0.4,c=0.6,d=0.8,将输入的频率变化量e和频率变化率ed的范围设定为[-0.5,0.5],输出变量j的范围设定为[0,10/pi,40/pi,60/pi,80/pi,100/pi],d
p
的范围设定为[0,600/pi,1200/pi,1800/pi,2400/pi,3000/pi]固定参数控制下虚拟惯量保持10/pi,阻尼系数保持1200/pi,在蓄电池正常工作状态下将本发明所述控制方法与未加惯量阻尼控制方法、传统固定惯量阻尼控制方法对比;在蓄电池过度放电状态下将本发明所述控制方法与传统固定惯量阻尼控制方法对比。图3~6对本发明所述的控制方法进行了全面的验证,证实了本发明的可行性、有效性,且通过比较证明了本发明相较于传统控制方法的优越性。
[0055]
图3给出了本发明所述控制方法与未加惯量阻尼控制、固定惯量阻尼控制方法对比下系统频率的变化曲线图。主要用于说明,本发明控制方法可以有效提供惯量支撑,频率动态响应较好。参照图3,为避免出虚拟惯量和阻尼系数以外其他因素影响,设置在系统运行稳定后(10s)投入本发明所述控制方法,设置荷电状态soc初始值为0.5,在系统运行10s时投入负荷400kw,图3明显可以看出,当频率受到扰动时,未加惯量阻尼控制环节的频率波动较大,最大超调量接近0.15hz,虚拟惯量和阻尼参数固定的虚拟同步控制优于未加惯量阻尼环节的频率响应波形,模糊自适应vsg的控制效果最好,频率波动最小,而且能够最快恢复到稳态。
[0056]
图4给出了本发明所述控制方法与固定惯量阻尼控制方法对比下蓄电池运行极限时,储能荷电状态soc的变化曲线图,主要用于说明与固定惯量阻尼控制方法相比,模糊自适应虚拟惯性控制能够有效减缓蓄电池的出力,避免蓄电池深度放电。参照图4,设置在系统运行稳定后(10s)投入本发明所述控制方法,为仿真蓄电池过度放电极限状态,设置荷电状态soc初始值为0.213。在系统运行10s时投入负荷400kw,图4可以看出,在soc即将进入深
度过放区时,模糊控制vsg下的蓄电池soc变化相对缓慢,延缓了蓄电池进入深度过放区的时间,改善了蓄电池的工作状态,明显优于固定参数vsg控制策略。
[0057]
图5和图6给出了本发明所述控制方法与传统固定惯量阻尼控制方法对比下蓄电池运行极限时,在负荷功率随机波动时系统频率、蓄电池荷电状态soc的变化曲线图。主要用于说明当蓄电池过充或过放时,相比于传统固定惯量阻尼控制方法,本发明所述控制方法可以有效减少蓄电池出力,避免蓄电池深度充放电,而且在负荷随机波动时可以选取合理的j和d
p
值,系统的动态响应较优。
[0058]
参照图5,为验证蓄电池在过度放电状态时,换流器运行在负荷随机波动状态下模糊控制策略的有效性,设置荷电状态soc初始值为0.213。在系统运行10s时投入负荷400kw,14s时切除负荷200kw,图5可以看出,模糊自适应vsg控制策略相较于传统固定惯量阻尼控制,可以通过调节j和d
p
的大小来平抑系统功率波动,进而增强频率的稳定性。
[0059]
参照图6,为验证蓄电池在过度放电状态时,换流器运行在负荷随机波动状态下模糊控制策略的优越性,设置荷电状态soc初始值为0.213。在系统运行10s时投入负荷400kw,14s时切除负荷200kw,图6可以看出,模糊自适应vsg控制下的蓄电池soc变化相对缓慢,有效降低蓄电池进入深度过放区的可能性,能够提高蓄电池的使用寿命。
[0060]
图中和文中个符号为:j为虚拟转动惯量,p0为有功功率设定值,pm为逆变电源的输入有功功率,pe为vsg单元输出的有功功率测量值,θ为相位角,ω0为角频率参考值,ω为实际角速度,d
p
为阻尼系数,s表示拉普拉斯变换的复频率,df/dt为频率变化率,为。f为系统频率,f0为系统频率,t表示仿真时间,soc表示蓄电池工作状态下瞬时荷电状态,a和d分别为蓄电池深度放电极限值和深度充电极限值,b和c为过度放电极限值和过度充电极限值。j0、j1、j2、j3、j4分别是各个阶段的虚拟惯量,d0、d1、d2、d3、d4分别是各个阶段的阻尼系数,m
ω
为有功功率的下垂系数。
[0061]
本发明充分考虑储能系统的运行极限、系统频率变化量和系统频率变化率三个约束条件的影响,以此来实现结合不同的运行工况动态调节虚拟惯量和阻尼系数大小,有效提供惯性支撑的能力,避免储能蓄电池出现深度过充和过放,从而延长储能的使用寿命。
[0062]
从图3~6所示的运行结果可以看出,针对系统和蓄电池都处于正常状态时,与未加惯量阻尼控制以及固定传统固定惯量阻尼控制相比,本发明所述的控制方法可以有效地降低频率波动,提高系统频率稳定性;针对蓄电池运行极限的部分,与固定惯量阻尼控制方法相比,本发明所述的控制方法可以有效的控制蓄电池的有功出力,避免蓄电池出现深度过充和过放;针对负荷随机波动的运行工况,本发明所述的控制方法可以有效的选取适当的惯量阻尼参数,以此来应对不同的运行状态,有效降低频率的波动,提高了系统的稳定性。整体而言,图3~6所示的运行结果证明了本发明所述考虑soc约束的模糊自适应虚拟惯性控制方法的有效性和优越性,提高vsg单元的安全稳定性和实用性。
[0063]
表1虚拟惯量j的模糊规则表
[0064][0065]
表2虚拟阻尼d
p
的模糊规则表
[0066]
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。