1.本公开内容涉及测量仪器技术领域,具体涉及一种测量设备。
背景技术:
2.现有技术中已知的测距轮只能测量距离,由此至多也就只能绘制该测距轮所行驶的路径的二维图形,而因为无法获取高度数据,所以无法绘制三维图形。
技术实现要素:
3.本公开内容的目的在于提供一种测距装置,以解决现有技术中的上述技术问题,即如何获取高度数据。本公开内容采用一种能够获取高度数据的测量设备。具体而言,本公开内容的技术方案如下:即通过具有固定长度的触地连杆以及相应的角度传感器来确定所述触地连杆和水平面的夹角,当知道该夹角时便能够计算出相应的高度,进而能够获取测量设备所行进的路线的三维数据。
4.更为具体而言,本公开内容提供一种测量设备,所述测量设备包括:
5.滚轮,所述滚轮具有旋转轴并且被配置用于确定所述测量设备所行进的距离;
6.触地连杆,所述触地连杆连接至所述滚轮的旋转轴;以及
7.角度传感器,所述角度传感器被设置在所述触地连杆上并且被配置用于确定所述触地连杆和水平面的夹角。
8.依据本公开内容的测量设备能够高效地获取触地连杆和水平面的夹角,从而能够换算出测量设备所在的平面与水平面的夹角,进而能够知道测量设备是否发生高度变化,该高度变化信息能够用于诸如测量设备所行驶路线的三维绘图等目的。
9.优选地,在依据本公开内容的一个实施例之中,所述角度传感器被构造为二维角度传感器。
10.优选地,在依据本公开内容的一个实施例之中,所述角度传感器被构造为三维角度传感器。
11.优选地,在依据本公开内容的一个实施例之中,所述触地连杆的纵向轴线与所述滚轮的轴线相交。
12.优选地,在依据本公开内容的一个实施例之中,所述触地连杆在使用时靠近接触面的一侧设置有至少一个滚动轴承。
13.优选地,在依据本公开内容的一个实施例之中,所述滚动轴承被构造为辅助滚轮。
14.优选地,在依据本公开内容的一个实施例之中,所述触地连杆的外壳由金属材料制成。
15.优选地,在依据本公开内容的一个实施例之中,所述触地连杆远离所述滚轮的一端被构造为表面光滑的球体。
16.优选地,在依据本公开内容的一个实施例之中,所述触地连杆远离所述滚轮的一端涂覆有耐磨涂层。
17.优选地,在依据本公开内容的一个实施例之中,所述耐磨涂层在制造过程中经过抛光处理工艺的处理。
18.优选地,在依据本公开内容的一个实施例之中,所述触地连杆的外壳中布置有重锤。
19.优选地,在依据本公开内容的一个实施例之中,所述重锤被布置在所述触地连杆的外壳靠近所述触地连杆的自由端的一侧。
20.优选地,在依据本公开内容的一个实施例之中,所述滚轮内设置有光电码盘或者霍尔传感器。
21.优选地,在依据本公开内容的一个实施例之中,所述角度传感器还被配置用于确定所述测量设备在水平面内的旋转角度。
22.优选地,在依据本公开内容的一个实施例之中,所述角度传感器包括以下传感器中的一种或者多种:
23.多轴陀螺仪;
24.重力加速度计;
25.电子罗盘;和/或
26.电子水泡。
27.优选地,在依据本公开内容的一个实施例之中,所述触地连杆与所述滚轮的连接处设置有扭簧,所述扭簧向所述触地连杆提供朝向地面一侧的驱使力。
28.综上所述,依据本公开内容的测量设备能够高效地获取触地连杆和水平面的夹角,从而能够换算出测量设备所在的平面与水平面的夹角,进而能够知道测量设备是否发生高度变化,该高度变化信息能够用于诸如测量设备所行驶路线的三维绘图等目的。
附图说明
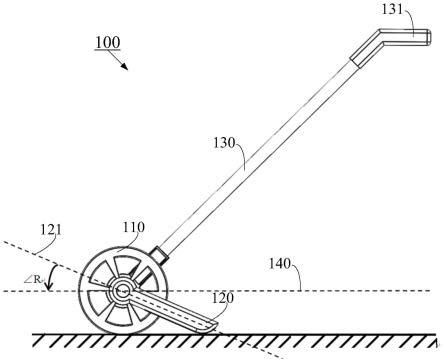
29.图1示出了依据本公开内容一个实施例所提供的测量设备100的结构示意图;
30.图2a示出了依据本公开内容另一个实施例所提供的测量设备200的具体结构示意图;
31.图2b示出了依据图2a的实施例所提供的测量设备200的具体结构示意图;
32.图3示出了依据本公开内容另一个实施例所提供的测量设备300的结构示意图;
33.图4a示出了依据本公开内容另一个实施例所提供的测量设备400的具体结构示意图;
34.图4b示出了依据图4a的实施例所提供的测量设备400的具体结构示意图;
35.图5示出了依据本公开内容一个实施例所提供的测量设备500的结构示意图;
36.图6a示出了依据本公开内容另一个实施例所提供的测量设备600的具体结构示意图;
37.图6b示出了依据图6a的实施例所提供的测量设备600的具体结构示意图;
38.图7示出了依据本公开内容另一个实施例所提供的测量设备700的结构示意图;
39.图8a示出了依据本公开内容另一个实施例所提供的测量设备800的具体结构示意图;
40.图8b示出了依据图8a的实施例所提供的测量设备800的具体结构示意图;以及
41.图9示出了依据本公开内容的测量设备使用时的应用场景示意图。
具体实施方式
42.下面将结合本公开内容实施例中的附图,对公开内容实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本公开内容的一部分实施例,而不是全部的实施例。基于本公开内容中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本公开内容保护的范围。
43.本公开内容中的术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”的特征可以明示或者隐含地包括至少一个该特征。本公开内容的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。本公开内容实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。
44.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本公开内容的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
45.本公开内容的目的在于提供一种测距装置,以解决现有技术中的上述技术问题,即如何获取高度数据。本公开内容采用一种能够获取高度数据的测量设备。具体而言,本公开内容的技术方案如下:即通过具有固定长度的触地连杆以及相应的角度传感器来确定所述触地连杆和水平面的夹角,当知道该夹角时便能够计算出相应的高度,进而能够获取测量设备所行进的路线的三维数据。概括而言,本公开内容提供一种测量设备,所述测量设备包括:滚轮,所述滚轮具有旋转轴并且被配置用于确定所述测量设备所行进的距离;触地连杆,所述触地连杆连接至所述滚轮的旋转轴;以及角度传感器,所述角度传感器被设置在所述触地连杆上并且被配置用于确定所述触地连杆和水平面的夹角。
46.以下将结合附图1至附图9来描述依据本公开内容所公开的测量设备的各种结构以及可能的实现形式,此外,还将借助于图9来描述依据本公开内容所公开的测量设备的工作过程以及工作原理。
47.图1示出了依据本公开内容一个实施例所提供的测量设备100的结构示意图。从图1之中可以看出,本公开内容所提出的测量设备100例如至少需要包括如下部件,即滚轮110,所述滚轮110具有旋转轴(将在图2a和图2b中详细示出)并且被配置用于确定所述测量设备100所行进的距离;触地连杆120,所述触地连杆120连接至所述滚轮110的旋转轴;以及角度传感器(图1之中未示出,将参照图2b进行详细描述),所述角度传感器被设置在所述触地连杆120上并且被配置用于确定所述触地连杆120和水平面的夹角∠r。如图1所示,当使用者(图中未示出)手持手柄131推着测量设备100向图1中左侧的方向行进时,由于触地连杆120的长度是固定的,而且由于触地连杆120的轴线121和滚轮110的旋转轴相交,即触地连杆与滚轮110的旋转轴相交处离地面的垂直距离也就是滚轮110的半径,而这个半径在测
量设备100制造好之后也是固定的,所以该触地连杆120和当前地面之间的夹角也是固定的。当当前地面和水平面140平行时,则此时触地连杆120和当前地面的夹角∠t即为触地连杆120和水平面140之间的夹角,即为∠r,也就是说∠t=∠r。与之不同的是,当当前地面和水平面140并非平行时,此时触地连杆120和当前地面的夹角例如为∠t(如前所述,该角度为固定值),由角度传感器所测得的触地连杆120和水平面140之间的夹角为∠r,如果地面为上坡面,那么∠r》∠t;与之相反地,如果地面为下坡面,那么∠r《∠t。如果将此时的地面和水平面之间的夹角定义为∠θ,那么∠θ=∠r-∠t,∠θ的值在上坡时应该为正值,而∠θ的值在下坡时应该为负值。
48.在具体使用时其测量过程将借助于图9进行描述。具体而言,例如在水平段ab之间,水平段ab之间的间距为l
ab
,高度差为h
ab
=0;在上坡段bc之间,bc两点之间的距离例如为l
bc
,测量出的触地连杆和水平面之间的角度例如为∠bc,则此时上坡段bc和水平面之间的夹角∠θ=∠bc-∠t,此时的高度差为h
bc
=l
bc
*sin∠θ。在下一个水平段cd之间,水平段cd之间的间距为l
cd
,高度差为h
cd
=0;接下来,在上坡段de之间,de两点之间的距离例如为l
de
,测量出的触地连杆和水平面之间的角度例如为∠de,则此时上坡段bc和水平面之间的夹角∠θ=∠de-∠t,此时的高度差为h
de
=l
de
*sin∠θ。而所有的各个分段的长度则可以例如通过测距设备的滚轮之中所含有的光电码盘或者霍尔传感器来计算滚轮所滚动的圈数,而滚轮的周长是固定的,所以基于这两个方面的信息便能够测量出各个分段之间的距离。具体而言,本领域的技术人员应当了解,此处的光电码盘例如能够和激光或红外光收发器配合使用,从而能够确定滚轮的滚动圈数;而霍尔传感器例如能够和磁钢/磁铁一起配合使用,同样能够确定滚轮的滚动圈数。概括而言,所述滚轮内设置有光电码盘或者霍尔传感器,以便测量各个分段的距离。
49.在本公开内容之中,所述角度传感器包括以下传感器中的一种或者多种:多轴陀螺仪;重力加速度计;电子罗盘;和/或电子水泡。以这样的实现方式均能够测量出所述触地连杆120和水平面的夹角。在此,除了测量所述触地连杆120和水平面的夹角之外,所述角度传感器还可以测量例如转向角或者方位角等其他角度,例如,所述角度传感器还被配置用于确定所述测量设备在水平面内的旋转角度。为了实现这样的技术目的,所述角度传感器既可以被构造为二维角度传感器,也可以被构造为三维角度传感器。再者,更为优选地,在依据本公开内容的一个实施例之中,所述触地连杆120与所述滚轮110的连接处设置有扭簧(图中未示出),所述扭簧向所述触地连杆120提供朝向地面一侧的驱使力。
50.具有了上述的各个部件中的至少一部分的测量设备能够高效地获取触地连杆和水平面的夹角,从而能够换算出测量设备所在的平面与水平面的夹角,进而能够知道测量设备是否发生高度变化,该高度变化信息能够用于诸如测量设备所行驶路线的三维绘图等目的。换句话说,在加入三维角度传感器和轮子转动计数的方式,实现三维空间的距离、面积、形状和体积测量,也就是说可以实现三维空间的大面积土方、山丘,建筑工地的测量,进而能够有效地绘制近似的三维空间立体图,并实现三维空间的距离测量和定位。
51.微观上,通过连续的测量和换算,就可以在垂直维度上得到一个连续的折线图,就可以近似的绘制出某个地形在高度上起伏变化。上面参照图9所演示的是上坡;反之一样的道理,也能够针对下坡进行计算。在具体实施时,每个取样点的选取至少有以下两种方式:其一是定时取样法,在该取样法之下,如每100ms取样一次,然后根据当前测量出的距离和
前一次的角度换算高度;另一种方法例如是角度变化阈值法,在该方法之下,如果当角度变化超出0.5度,则根据当前测量出的距离和前一次的角度来换算高度。当然,通过加快采用的时间或者减小角度变化的阈值,可以提升起伏变化和绘图的精细度。
52.为了进一步优化相关方案,例如减小磨损,在依据本公开内容的一个实施例之中,所述触地连杆120的外壳例如能够由耐磨材料制成,例如由金属材料制成。优选地,在依据本公开内容的一个实施例之中,所述触地连杆120远离所述滚轮110的一端涂覆有耐磨涂层。更为优选地,所述耐磨涂层在制造过程中经过抛光处理工艺的处理。
53.以下将借助于图2a和图2b来描述该附加的技术特征,即涂覆有耐磨涂层的设计。图2a示出了依据本公开内容另一个实施例所提供的测量设备200的具体结构示意图,而图2b示出了依据图2a的实施例所提供的测量设备200的具体结构示意图。从图2a和图2b之中可以看出,本公开内容所提出的测量设备200例如至少需要包括如下部件,即滚轮210,所述滚轮210具有旋转轴211并且被配置用于确定所述测量设备200所行进的距离;触地连杆220,所述触地连杆220连接至所述滚轮210的旋转轴;以及角度传感器224(接下来将参照图2b进行详细描述),所述角度传感器224被设置在所述触地连杆220上并且被配置用于确定所述触地连杆220和水平面的夹角∠r。如图2a和图2b所示,当使用者(图中未示出)手持手柄230推着测量设备200向前行进时,由于触地连杆220的长度是固定的,而且由于触地连杆220的轴线221和滚轮210的旋转轴211相交,即触地连杆与滚轮210的旋转轴相交处离地面的垂直距离也就是滚轮210的半径,而这个半径在测量设备200制造好之后也是固定的,所以该触地连杆220和当前地面之间的夹角也是固定的。当当前地面和水平面平行时,则此时触地连杆220和当前地面的夹角∠t即为触地连杆220和水平面之间的夹角,即为∠r,也就是说∠t=∠r。与之不同的是,当当前地面和水平面并非平行时,此时触地连杆220和当前地面的夹角例如为∠t(如前所述,该角度为固定值),由角度传感器所测得的触地连杆220和水平面之间的夹角为∠r,如果地面为上坡面,那么∠r》∠t;与之相反地,如果地面为下坡面,那么∠r《∠t。如果将此时的地面和水平面之间的夹角定义为∠θ,那么∠θ=∠r-∠t,∠θ的值在上坡时应该为正值,而∠θ的值在下坡时应该为负值。
54.此外,从图2a和图2b之中可以看出,为了减小磨损,在依据本公开内容的一个实施例之中,所述触地连杆220的外壳例如能够由耐磨材料制成,优选地例如能够由金属材料制成。优选地,在依据本公开内容的一个实施例之中,所述触地连杆220远离所述滚轮210的一端涂覆有耐磨涂层222。更为优选地,所述耐磨涂层222在制造过程中经过抛光处理工艺的处理。再者,优选地,在依据本公开内容的一个实施例之中,所述触地连杆220的外壳中布置有重锤223。优选地,在依据本公开内容的一个实施例之中,所述重锤223被布置在所述触地连杆220的外壳靠近所述触地连杆220的自由端的一侧。
55.图3示出了依据本公开内容另一个实施例所提供的测量设备300的结构示意图。从图3之中可以看出,本公开内容所提出的测量设备300例如至少需要包括如下部件,即滚轮310,所述滚轮310具有旋转轴(将在图4a和图4b中详细示出)并且被配置用于确定所述测量设备300所行进的距离;触地连杆320,所述触地连杆320连接至所述滚轮310的旋转轴;以及角度传感器(图3之中未示出,将参照图4b进行详细描述),所述角度传感器被设置在所述触地连杆320上并且被配置用于确定所述触地连杆320和水平面的夹角∠r。如图3所示,当使用者(图中未示出)手持手柄331推着测量设备300向图3中左侧的方向行进时,由于触地连
杆320的长度是固定的,而且由于触地连杆320的轴线321和滚轮310的旋转轴相交,即触地连杆与滚轮310的旋转轴相交处离地面的垂直距离也就是滚轮310的半径,而这个半径在测量设备300制造好之后也是固定的,所以该触地连杆320和当前地面之间的夹角也是固定的。当当前地面和水平面平行时,则此时触地连杆320和当前地面的夹角∠t即为触地连杆320和水平面之间的夹角,即为∠r,也就是说∠t=∠r。与之不同的是,当当前地面和水平面并非平行时,此时触地连杆320和当前地面的夹角例如为∠t(如前所述,该角度为固定值),由角度传感器所测得的触地连杆320和水平面之间的夹角为∠r,如果地面为上坡面,那么∠r》∠t;与之相反地,如果地面为下坡面,那么∠r《∠t。如果将此时的地面和水平面之间的夹角定义为∠θ,那么∠θ=∠r-∠t,∠θ的值在上坡时应该为正值,而∠θ的值在下坡时应该为负值。此外,从图3之中可以看出,所述触地连杆320远离所述滚轮310的一端被构造为表面光滑的球体323。换句话说,所述触地连杆320远离所述滚轮310的旋转轴的一端设置有类球体323,所述类球体323既可以是半球也可以是一个整球。
56.图4a示出了依据本公开内容另一个实施例所提供的测量设备400的具体结构示意图,而图4b示出了依据图4a的实施例所提供的测量设备400的具体结构示意图。从图4a和图4b之中可以看出,本公开内容所提出的测量设备400例如至少需要包括如下部件,即滚轮410,所述滚轮410具有旋转轴411并且被配置用于确定所述测量设备400所行进的距离;触地连杆420,所述触地连杆420连接至所述滚轮410的旋转轴;以及角度传感器424(接下来将参照图4b进行详细描述),所述角度传感器424被设置在所述触地连杆420上并且被配置用于确定所述触地连杆420和水平面的夹角∠r。如图4a和图4b所示,当使用者(图中未示出)手持手柄430推着测量设备400向前行进时,由于触地连杆420的长度是固定的,而且由于触地连杆420的轴线421和滚轮410的旋转轴411相交,即触地连杆与滚轮410的旋转轴相交处离地面的垂直距离也就是滚轮410的半径,而这个半径在测量设备400制造好之后也是固定的,所以该触地连杆420和当前地面之间的夹角也是固定的。当当前地面和水平面平行时,则此时触地连杆420和当前地面的夹角∠t即为触地连杆420和水平面之间的夹角,即为∠r,也就是说∠t=∠r。与之不同的是,当当前地面和水平面并非平行时,此时触地连杆420和当前地面的夹角例如为∠t(如前所述,该角度为固定值),由角度传感器所测得的触地连杆420和水平面之间的夹角为∠r,如果地面为上坡面,那么∠r》∠t;与之相反地,如果地面为下坡面,那么∠r《∠t。如果将此时的地面和水平面之间的夹角定义为∠θ,那么∠θ=∠r-∠t,∠θ的值在上坡时应该为正值,而∠θ的值在下坡时应该为负值。
57.此外,从图4a和图4b之中可以看出,优选地,所述触地连杆420的一端布置有表面光滑的球体423,其和图2a和图2b中的重锤223的作用有相同的部分,即使得触地连杆420在行进的过程中尽量快速地贴合地面。
58.图5示出了依据本公开内容一个实施例所提供的测量设备500的结构示意图。从图5之中可以看出,本公开内容所提出的测量设备500例如至少需要包括如下部件,即滚轮510,所述滚轮510具有旋转轴(将在图6a和图6b中详细示出)并且被配置用于确定所述测量设备500所行进的距离;触地连杆520,所述触地连杆520连接至所述滚轮510的旋转轴;以及角度传感器(图5之中未示出,将参照图6b进行详细描述),所述角度传感器被设置在所述触地连杆520上并且被配置用于确定所述触地连杆520和水平面的夹角∠r。如图5所示,当使用者(图中未示出)手持手柄531推着测量设备500向图5中左侧的方向行进时,由于触地连
杆520的长度是固定的,而且由于触地连杆520的轴线521和滚轮510的旋转轴相交,即触地连杆与滚轮510的旋转轴相交处离地面的垂直距离也就是滚轮510的半径,而这个半径在测量设备500制造好之后也是固定的,所以该触地连杆520和当前地面之间的夹角也是固定的。当当前地面和水平面平行时,则此时触地连杆520和当前地面的夹角∠t即为触地连杆520和水平面之间的夹角,即为∠r,也就是说∠t=∠r。与之不同的是,当当前地面和水平面并非平行时,此时触地连杆520和当前地面的夹角例如为∠t(如前所述,该角度为固定值),由角度传感器所测得的触地连杆520和水平面之间的夹角为∠r,如果地面为上坡面,那么∠r》∠t;与之相反地,如果地面为下坡面,那么∠r《∠t。如果将此时的地面和水平面之间的夹角定义为∠θ,那么∠θ=∠r-∠t,∠θ的值在上坡时应该为正值,而∠θ的值在下坡时应该为负值。此外,从图5之中可以看出,所述触地连杆520在使用时靠近接触面的一侧设置有至少一个滚动轴承523。
59.图6a示出了依据本公开内容另一个实施例所提供的测量设备600的具体结构示意图,而图6b示出了依据图6a的实施例所提供的测量设备600的具体结构示意图。从图6a和图6b之中可以看出,本公开内容所提出的测量设备600例如至少需要包括如下部件,即滚轮610,所述滚轮610具有旋转轴611并且被配置用于确定所述测量设备600所行进的距离;触地连杆620,所述触地连杆620连接至所述滚轮610的旋转轴;以及角度传感器624(接下来将参照图6b进行详细描述),所述角度传感器624被设置在所述触地连杆620上并且被配置用于确定所述触地连杆620和水平面的夹角∠r。如图6a和图6b所示,当使用者(图中未示出)手持手柄630推着测量设备600向前行进时,由于触地连杆620的长度是固定的,而且由于触地连杆620的轴线621和滚轮610的旋转轴611相交,即触地连杆与滚轮610的旋转轴相交处离地面的垂直距离也就是滚轮610的半径,而这个半径在测量设备600制造好之后也是固定的,所以该触地连杆620和当前地面之间的夹角也是固定的。当当前地面和水平面平行时,则此时触地连杆620和当前地面的夹角∠t即为触地连杆620和水平面之间的夹角,即为∠r,也就是说∠t=∠r。与之不同的是,当当前地面和水平面并非平行时,此时触地连杆620和当前地面的夹角例如为∠t(如前所述,该角度为固定值),由角度传感器所测得的触地连杆620和水平面之间的夹角为∠r,如果地面为上坡面,那么∠r》∠t;与之相反地,如果地面为下坡面,那么∠r《∠t。如果将此时的地面和水平面之间的夹角定义为∠θ,那么∠θ=∠r-∠t,∠θ的值在上坡时应该为正值,而∠θ的值在下坡时应该为负值。
60.此外,从图6a和图6b之中可以看出,优选地,所述触地连杆620在使用时靠近接触面的一侧设置有至少一个滚动轴承622。和图6a和图6b中的重锤623的作用有相同的部分地,所述触地连杆620的外壳中布置有重锤623。优选地,在依据本公开内容的一个实施例之中,所述重锤623被布置在所述触地连杆620的外壳靠近所述触地连杆620的自由端的一侧,使得触地连杆620在行进的过程中尽量快速地贴合地面。
61.图7示出了依据本公开内容另一个实施例所提供的测量设备700的结构示意图。从图7之中可以看出,本公开内容所提出的测量设备700例如至少需要包括如下部件,即滚轮710,所述滚轮710具有旋转轴(将在图8a和图8b中详细示出)并且被配置用于确定所述测量设备700所行进的距离;触地连杆720,所述触地连杆720连接至所述滚轮710的旋转轴;以及角度传感器(图7之中未示出,将参照图8b进行详细描述),所述角度传感器被设置在所述触地连杆720上并且被配置用于确定所述触地连杆720和水平面的夹角∠r。如图7所示,当使
用者(图中未示出)手持手柄731推着测量设备700向图7中左侧的方向行进时,由于触地连杆720的长度是固定的,而且由于触地连杆720的轴线721和滚轮710的旋转轴相交,即触地连杆与滚轮710的旋转轴相交处离地面的垂直距离也就是滚轮710的半径,而这个半径在测量设备700制造好之后也是固定的,所以该触地连杆720和当前地面之间的夹角也是固定的。当当前地面和水平面平行时,则此时触地连杆720和当前地面的夹角∠t即为触地连杆720和水平面之间的夹角,即为∠r,也就是说∠t=∠r。与之不同的是,当当前地面和水平面并非平行时,此时触地连杆720和当前地面的夹角例如为∠t(如前所述,该角度为固定值),由角度传感器所测得的触地连杆720和水平面之间的夹角为∠r,如果地面为上坡面,那么∠r》∠t;与之相反地,如果地面为下坡面,那么∠r《∠t。如果将此时的地面和水平面之间的夹角定义为∠θ,那么∠θ=∠r-∠t,∠θ的值在上坡时应该为正值,而∠θ的值在下坡时应该为负值。此外,从图7之中可以看出,所述触地连杆720在使用时靠近接触面的一侧设置有至少一个滚动轴承,所述滚动轴承被构造为辅助滚轮723。
62.图8a示出了依据本公开内容另一个实施例所提供的测量设备800的具体结构示意图,而图8b示出了依据图8a的实施例所提供的测量设备800的具体结构示意图。图8a示出了依据本公开内容另一个实施例所提供的测量设备800的具体结构示意图,而图8b示出了依据图8a的实施例所提供的测量设备800的具体结构示意图。从图8a和图8b之中可以看出,本公开内容所提出的测量设备800例如至少需要包括如下部件,即滚轮810,所述滚轮810具有旋转轴811并且被配置用于确定所述测量设备800所行进的距离;触地连杆820,所述触地连杆820连接至所述滚轮810的旋转轴;以及角度传感器824(接下来将参照图8b进行详细描述),所述角度传感器824被设置在所述触地连杆820上并且被配置用于确定所述触地连杆820和水平面的夹角∠r。如图8a和图8b所示,当使用者(图中未示出)手持手柄830推着测量设备800向前行进时,由于触地连杆820的长度是固定的,而且由于触地连杆820的轴线821和滚轮810的旋转轴811相交,即触地连杆与滚轮810的旋转轴相交处离地面的垂直距离也就是滚轮810的半径,而这个半径在测量设备800制造好之后也是固定的,所以该触地连杆820和当前地面之间的夹角也是固定的。当当前地面和水平面平行时,则此时触地连杆820和当前地面的夹角∠t即为触地连杆820和水平面之间的夹角,即为∠r,也就是说∠t=∠r。与之不同的是,当当前地面和水平面并非平行时,此时触地连杆820和当前地面的夹角例如为∠t(如前所述,该角度为固定值),由角度传感器所测得的触地连杆820和水平面之间的夹角为∠r,如果地面为上坡面,那么∠r》∠t;与之相反地,如果地面为下坡面,那么∠r《∠t。如果将此时的地面和水平面之间的夹角定义为∠θ,那么∠θ=∠r-∠t,∠θ的值在上坡时应该为正值,而∠θ的值在下坡时应该为负值。
63.此外,概括而言,优选地,在依据公开内容的一个实施例之中,所述角度传感器被构造为二维角度传感器。优选地,在依据本公开内容的一个实施例之中,所述角度传感器被构造为三维角度传感器。优选地,在依据本公开内容的一个实施例之中,所述触地连杆的纵向轴线与所述滚轮的轴线相交。优选地,在依据本公开内容的一个实施例之中,所述触地连杆在使用时靠近接触面的一侧设置有至少一个滚动轴承。优选地,在依据本公开内容的一个实施例之中,所述滚动轴承被构造为辅助滚轮。优选地,在依据本公开内容的一个实施例之中,所述触地连杆的外壳由金属材料制成。优选地,在依据本公开内容的一个实施例之中,所述触地连杆远离所述滚轮的一端被构造为表面光滑的球体。优选地,在依据本公开内
容的一个实施例之中,所述触地连杆远离所述滚轮的一端涂覆有耐磨涂层。优选地,在依据本公开内容的一个实施例之中,所述耐磨涂层在制造过程中经过抛光处理工艺的处理。优选地,在依据本公开内容的一个实施例之中,所述触地连杆的外壳中布置有重锤。优选地,在依据本公开内容的一个实施例之中,所述重锤被布置在所述触地连杆的外壳靠近所述触地连杆的自由端的一侧。优选地,在依据本公开内容的一个实施例之中,所述滚轮内设置有光电码盘或者霍尔传感器。优选地,在依据本公开内容的一个实施例之中,所述角度传感器还被配置用于确定所述测量设备在水平面内的旋转角度。优选地,在依据本公开内容的一个实施例之中,所述角度传感器包括以下传感器中的一种或者多种:多轴陀螺仪;重力加速度计;电子罗盘;和/或电子水泡。优选地,在依据本公开内容的一个实施例之中,所述触地连杆与所述滚轮的连接处设置有扭簧,所述扭簧向所述触地连杆提供朝向地面一侧的驱使力。综上所述,依据本公开内容的测量设备能够高效地获取触地连杆和水平面的夹角,从而能够换算出测量设备所在的平面与水平面的夹角,进而能够知道测量设备是否发生高度变化,该高度变化信息能够用于诸如测量设备所行驶路线的三维绘图等目的。
64.以上所述的仅是本公开内容的实施方式,在此应当指出,对于本领域的普通技术人员来说,在不脱离本公开内容创造构思的前提下,还可以做出改进,但这些均属于本公开内容的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
