技术特征:
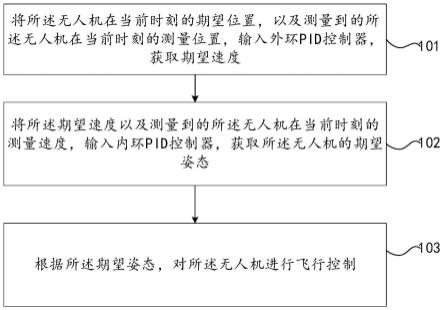
1.一种无人机飞行控制方法,其特征在于,应用于无人机编队中的任一无人机;所述方法包括:将所述无人机在当前时刻的期望位置,以及测量到的所述无人机在当前时刻的测量位置,输入外环pid控制器,获取期望速度;将所述期望速度以及测量到的所述无人机在当前时刻的测量速度,输入内环pid控制器,获取所述无人机的期望姿态;根据所述期望姿态,对所述无人机进行飞行控制。2.根据权利要求1所述的无人机飞行控制方法,其特征在于,将所述无人机在当前时刻的期望位置,以及测量到的所述无人机在当前时刻的测量位置,输入外环pid控制器,获取期望速度,包括:将所述无人机在当前时刻的期望位置,以及测量到的所述无人机在当前时刻的测量位置输入外环pid控制器,根据所述外环pid控制器中的第一控制条件以及第二控制条件获取所述期望速度;其中,所述v
d
表示所述期望速度,p
d
表示所述期望位置,p表示所述测量位置,e
p
表示所述期望位置与测量位置的差,表示e
p
的微分,k
p
、k
i
、k
d
∈r2×2,k
p
表示外环pid控制器的比例项系数,k
i
表示外环pid控制器的积分项系数,k
d
表示外环pid控制器的微分项系数。3.根据权利要求2所述的无人机飞行控制方法,其特征在于,将所述期望速度以及测量到的所述无人机在当前时刻的测量速度,输入内环pid控制器,获取所述无人机的期望姿态,包括:将所述期望速度以及测量到的所述无人机在当前时刻的测量速度,输入内环pid控制器,根据所述内环pid控制器中的第三控制条件以及第四控制条件第四控制条件获取所述期望姿态;其中,θ
d
表示所述期望姿态,e
v
所述期望速度与测量速度的差,表示e
v
的微分,k
vp
、k
vi
、k
vd
∈r2×2,k
vp
表示内环pid控制器的比例项系数,k
vi
表示内环pid控制器的积分项系数,k
vd
表示内环pid控制器的微分项系数。4.根据权利要求1-3任意一项所述的无人机飞行控制方法,其特征在于,还包括:确定所述无人机的通信链路异常,根据所述无人机搭载的视觉设备,获取当前时刻的视觉图像;根据当前时刻的视觉图像,确定所述测量位置。5.根据权利要求4所述的无人机飞行控制方法,其特征在于,还包括:根据当前时刻的视觉图像,以及上一时刻的视觉图像,确定所述测量速度。6.根据权利要求4所述的无人机飞行控制方法,其特征在于,还包括:确定所述无人机为长机,根据各所述控制策略中已选定的控制策略对应的动态信号,控制所述无人机的特征区域进行变化操作,以使所述无人机编队中的僚机通过搭载在所述僚机上的视觉设备获取所述特征区域的特征信息。
7.根据权利要求1所述的无人机飞行控制方法,其特征在于,所述期望位置根据所述无人机的规划飞行路径中,各预设目标点指定的到达时刻和相邻预设目标点之间的路径确定。8.一种无人机飞行控制装置,其特征在于,应用于无人机编队中的任一无人机,包括:速度获取模块,用于将所述无人机在当前时刻的期望位置,以及测量到的所述无人机在当前时刻的测量位置,输入外环pid控制器,获取期望速度;姿态获取模块,用于将所述期望速度以及测量到的所述无人机在当前时刻的测量速度,输入内环pid控制器,获取所述无人机的期望姿态;飞行控制模块,用于根据所述期望姿态,对所述无人机进行飞行控制。9.一种无人机编队中的无人机,包括处理器和存储有计算机程序的存储器,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7任一项所述的无人机飞行控制方法。10.一种无人机编队,其特征在于,所述无人机编队包括根据权利要求9所述的无人机。
技术总结
本申请涉及无人机控制技术领域,提供一种无人机飞行控制方法、无人机及无人机编队。所述方法应用于无人机编队中的任一无人机,包括:将所述无人机在当前时刻的期望位置,以及测量到的所述无人机在当前时刻的测量位置,输入外环PID控制器,获取期望速度;将所述期望速度以及测量到的所述无人机在当前时刻的测量速度,输入内环PID控制器,获取所述无人机的期望姿态;根据所述期望姿态,对所述无人机进行飞行控制。本申请实施例提供的无人机飞行控制方法能够提高无人机的飞行稳定性。方法能够提高无人机的飞行稳定性。方法能够提高无人机的飞行稳定性。
技术研发人员:蒿杰 张文清 孙亚强 历宁 吕志丰 蔡圳烽 杨馨
受保护的技术使用者:令箭科技(广州)有限责任公司
技术研发日:2022.11.22
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。