一种基于激光lidar数据的地质灾害增强显示方法
技术领域
1.本发明涉及信息获取与处理技术领域,具体涉及一种基于激光lidar数据的地质灾害增强显示方法。
背景技术:
2.中国是世界上地质灾害最严重、受威胁人口最多的国家之一。据自然资源部数据显示,截止2020年底,全国已发现地质灾害隐患点的数量达33万多处。近十年来发生的多起重大地质灾害有70%不在已查明的隐患范围内,呈现出“高位、高隐蔽性”的共同特征,传统人工调查和传统手段很难发现。随着遥感技术的发展,机载lidar技术为“高位、高隐蔽性”的地质灾害的早期识别提供新的解决方案。机载lidar具有穿透植被、获取真实地面高程数据信息、揭示斜坡历史损伤等优点。在利用机载lidar获取点云数据经过滤波处理得到真实地表模型(dem)数据后,通常将其可视化为灰色图像或彩色影像来帮助识别研究区的潜在地质灾害。
3.目前主流的可视化方法包含山体阴影图与red relief image map(rrim)图,它们在地质灾害的增强显示效果上均具有不同程度的缺点。
4.山体阴影图是最常用的可视化方法之一,其由提出并制定标准一直沿用至今,原理是利用假想的太阳光在特定的角度对地面照射所产生表面明暗程度连续变化,使地貌的分布、起伏和形态特征实现一种立体感增强显示。
5.但是,单一光束无法揭示平行于它的线性结构,如果改变光源的方向,会得到完全颠倒的凹凸感,并且小的地形可能被阴影遮蔽,在地质灾害识别工作中,常常切换多个方向的山体阴影来避免识别遗漏,这使得识别流程及数据存储变得更加繁琐。
6.red relief image map(rrim),由国外学者chiba等提出,其由地形坡度、正向开放和负向开放三个地貌要素层相乘而成。先根据dem分别在saga与arcgis中计算出地形正开度、地形负开度及坡度,再采用栅格计算器计算脊谷指数i,将坡度图层叠加在脊谷指数图层之上,调整两个图层的色带以及透明度,最后得到rrim图。该技术方法处理流程较为繁琐且成本较高;其服务于考古地区地形的增强显示,未针对各类地质灾害的识别特征进行专业的增强显示研究。
技术实现要素:
7.针对现有技术中的上述不足,本发明提供的一种基于激光lidar数据的地质灾害增强显示方法解决了不同光照条件下山体阴影丢失灾害边界细节、多个方向的山体阴影数据存储量大、未对地质灾害的识别特征进行专有的增强处理的问题。
8.为了达到上述发明目的,本发明采用的技术方案为:一种基于激光lidar数据的地质灾害增强显示方法,包括以下步骤:
9.s1、载入研究区的dem数据并在rvt软件中生成坡度图、正开度图和svf图;
10.s2、利用坡度图作为底图,将rvt软件混合模式设置为nomal,不透明度设置为
100%,得到处理后的底图;
11.s3、将处理后的底图与正开度图采用混合模块中的multiply模式融合,不透明度设置为70%,得到成果图;
12.s4、将成果图和svf图采用混合模块中的screen模式融合,并将不透明度设置为50%,得到最终成果图;
13.s5、根据最终成果图进行地质灾害遥感识别。
14.本发明的有益效果为:
15.1.解决了单一光源方向山体阴影丢失灾害边界细节和多个光源方向山体阴影数据存储量大的问题。
16.2.解决了现有技术rrim图数据处理流程繁琐、未对地质灾害的特征信息进行专有的增强处理的问题。
17.3.弥补了多个可视化因子图层的不足,突破图层自身的缺点导致的应用限制。
附图说明
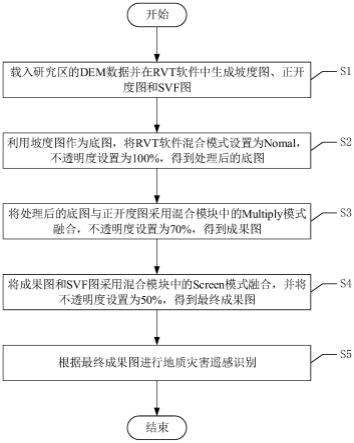
18.图1为本发明流程图。
具体实施方式
19.下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
20.如图1所示,一种基于激光lidar数据的地质灾害增强显示方法,包括以下步骤:
21.s1、载入研究区的dem数据并在rvt软件中生成坡度图、正开度图和svf图;
22.s2、利用坡度图作为底图,将rvt软件混合模式设置为nomal,不透明度设置为100%,得到处理后的底图;
23.s3、将处理后的底图与正开度图采用混合模块中的multiply模式融合,不透明度设置为70%,得到成果图;
24.s4、将成果图和svf图采用混合模块中的screen模式融合,并将不透明度设置为50%,得到最终成果图;
25.s5、根据最终成果图进行地质灾害遥感识别。
26.在本发明的一个实施例中,本发明应用于滑坡、崩塌、泥石流的识别与信息提取中,均得到了较山体阴影、svf、rrim更好的可视化增强效果。
27.在滑坡的遥感解译识别中,滑坡变形破坏后在地表留下的滑坡壁、滑坡台坎、鼓丘、局部隆起等微地貌特征,都是十分重要的解译标志。利用机载lidar技术获取点云数据,经滤除植被后获取dem后,选取山体阴影图、svf图、rrim图这三种主流的可视化方法与本发明的结果图层来进行遥感判释对比。山体阴影图对于解译经验丰富的解译人员来说,能够初步识别潜在滑坡体的存在,但存在滑坡边界被光照阴影遮蔽、拉裂缝不明显等问题;svf图排除了阴影的影响,并且给予了滑坡边界黑色的色调以达到增强效果,但大面积的黑色像元与可塑性的缺失影响了识别工作的进行;rrim图将色调改成了红色,对于滑坡壁的增
强呈现为深红色,平地的增强表现近于白色,效果较好但步骤繁琐。本发明的结果图层除了补全svf的可塑性外,还改进了拉裂缝及次级滑动痕迹在图层中的表现,结果如表1所示:
28.表1
[0029][0030][0031]
除了滑坡这一主要地质灾害类型之外,崩塌也较为常见,是影响较大的地质灾害类型之一。其中,崩塌的识别要素包括崩前的危岩体与崩后的崩塌堆积体。
[0032]
选取山体阴影图、svf图、rrim图这三种主流的可视化方法与本发明的结果图层来进行遥感判释对比。其中山体阴影图为常用的45
°
高度角、315
°
光照角的山体阴影图,由于光照导致的阴影直接干扰危岩体和崩塌堆积体边界的准确识别;经过svf可视化处理后的图层,去除了光照的影响,能够大致分辨出崩塌的形态,过多的黑色像素导致整幅影像的亮度过低,还需要进一步增强其对比度;rrim图对危岩体出露地带的增强效果较好,对崩塌堆积体的特征增强表现不足;在本发明的结果图层中,山体阴影图中边缘细节被遮挡部分已经凸显出来,同时具有比svf更高的亮度,比rrim图更强的层次感,这一方法既增强了危岩体和崩塌堆积体的轮廓细节,还削弱了坡面其他要素对崩塌的识别干扰,结果如表2所示:
[0033]
表2
[0034][0035]
泥石流是山区常见的地质灾害之一,具有冲击破坏力大,发展迅速、流动能力强等特点。在遥感影像上判释某灾害为泥石流时,通常需要满足以下三个条件:
①
汇水条件良好
②
崩滑物源、沟道物源丰富
③
沟口发育有堆积扇。其中,对形成区与堆积区的识别至关重要,形成区一般呈瓢形,山坡陡峻,松散固体物质丰富;沉积区位于沟谷出口处,纵坡平缓,常形成洪积扇或冲出锥,扇面无固定沟槽,多呈漫流状态。
[0036]
山体阴影、svf、rrim这三种主流的可视化方法来进行遥感判释对比。山体阴影图仅仅使得堆积区的色调与周边色调具有明显区别,沿流通区沟道向上至形成区增强效果逐渐减弱;svf图排除了光照的影响,整个泥石流的形态特征初步显现,但svf影像的亮度过低,还需要进一步增强其对比度;rrim图将主色调设置为红色,增强效果与svf图类似,但过程更加繁琐;在本发明结果图层中,形成区的多个崩塌堆积体的识别已经不受阴影干扰,提取更加精细的边界有助于物源量的准确计算,流通区的沟道具有更清晰的轮廓表现,堆积区呈扇形,存在多条与沟道大致平行的起伏状垅岗,使得前方的河流发生改道,结果如表3所示:
[0037]
表3
[0038][0039]
本发明方法所得到的融合图层对各类地质灾害的识别特征都实现了增强效果,其融合多种可视化因子如坡度、天空视域因子、正开度对不同地质灾害特征细节的增强效果于一个结果图层中,并且可以通过relief visualization toolbox软件一键式操作,其既解决了数据冗杂、不易存储、步骤复杂的问题,同时使地质灾害识别中所需要的细节特征要素得到增强。
[0040]
本发明解决了单一光源方向山体阴影丢失灾害边界细节和多个光源方向山体阴影数据存储量大的问题;解决了现有技术rrim图数据处理流程繁琐、未对地质灾害的特征信息进行专有的增强处理的问题;弥补了多个可视化因子图层的不足,突破图层自身的缺点导致的应用限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。