技术特征:
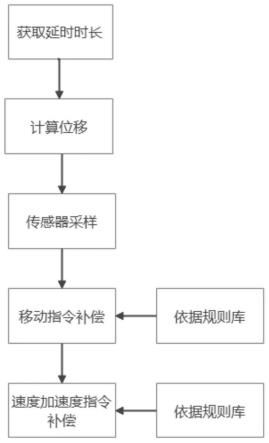
1.一种无人机自主降落延时补偿控制方法,其特征在于,所述补偿控制方法包括以下步骤:步骤s1:获取无人机机载传感器采样时刻、输出时刻,解算模块输入、输出时刻,控制指令传输过程输入、输出时刻,从而得到整个过程延时时长;步骤s2:采用分段近似累加的方式,对无人机延时阶段位置进行计算;步骤s3:对无人机移动目标位置进行修正;步骤s4:依据修正后的目标位置,结合规则库,确定无人机移动的速度和加速度。2.如权利要求1所述的无人机自主降落延时补偿控制方法,其特征在于,步骤s1中,可采用时间戳或建模的方法获取各环节的延时时长。3.如权利要求2所述的无人机自主降落延时补偿控制方法,其特征在于,步骤s1中,所述机载传感器至少包括摄像头、超声波传感器、激光测距传感器。4.如权利要求1或2所述的无人机自主降落延时补偿控制方法,其特征在于,步骤s1中,整个过程延时时长为获取的各个环节延时时长累积结果。5.如权利要求1所述的无人机自主降落延时补偿控制方法,其特征在于,步骤s2中,补偿过程是:首先、分析无人机机载传感器采样频率、飞控计算机的控制频率以及运算过程的信号时序,绘制时序图;然后、根据时序图得到无人机控制信号的实际延时时长;继而、计算延时阶段无人机的位移。6.如权利要求5所述的无人机自主降落延时补偿控制方法,其特征在于,延时阶段无人机的位移的计算方法是:机的位移的计算方法是:公式中,dx是延时过程无人机x轴方向移动距离,dy是延时过程无人机y轴方向移动距离,n是延时期间的分段数,v
xi
是无人机x轴方向速度,v
yi
是无人机y轴方向速度,a
xi
是无人机x轴方向加速度,a
yi
是无人机y轴方向加速度,δt
i
是时间间隔。7.如权利要求1所述的无人机自主降落延时补偿控制方法,其特征在于,步骤s3中,具体修正过程是:x
new
=x
ori-dx,dx是延时过程无人机x方向移动距离,x
ori
是原横轴位置,x
new
是新的横轴位置;y
new
=y
ori-dy,dy是延时过程无人机y方向移动距离,y
ori
是原纵轴位置,y
new
是新纵轴位置。8.如权利要求1所述的无人机自主降落延时补偿控制方法,其特征在于,确定无人机移动的速度和加速度时,需要根据无人机着陆过程中不同高度和位置偏差对应不同的速度和加速度。9.如权利要求1所述的无人机自主降落延时补偿控制方法,其特征在于,所述规则库建
立方法是:首先根据无人机的最终控制效果,确定控制参数;然后,选择影响控制参数的变量作为规则库的输入变量,控制参数作为规则库的输出变量;继而,确定控制参数和控制变量的论域;最后,建立模糊控制规则表,即为规则库。10.如权利要求9所述的无人机自主降落延时补偿控制方法,其特征在于,水平位置偏差和高度偏差构建二维模糊规则库。
技术总结
本发明属于无人机精确着陆控制领域,具体提出的一种无人机精确着陆延时补偿控制方法;首先获取无人机机载传感器采样时刻、输出时刻,解算模块输入、输出时刻,控制指令传输过程输入、输出时刻,从而得到整个过程延时时长;然后采用分段近似累加的方式,对无人机延时阶段位置进行计算;继而对无人机移动目标位置进行修正;最后依据修正后的目标位置,结合规则库,确定无人机移动的速度和加速度。使用该位置补偿方法,可以修正延时阶段无人机的位置偏移,为位置控制提供了基础。模糊控制策略较好的抑制了超调,减小了无人机降落过程中水平位置的振荡,缩短了降落时间。缩短了降落时间。缩短了降落时间。
技术研发人员:周亨 王兆山 黄志勇 付立春 马东林 王可心 余立强 吴令华 侯祥民
受保护的技术使用者:中国直升机设计研究所
技术研发日:2022.11.17
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。