1.本发明属于复合材料三维编织装备的运动学、动力学与控制研究领域,尤其是一类由数量众多电机驱动的复合材料三维编织装备的协同控制方法,主要面向复合材料三维编织装备高品质快速作业的工程应用需求。
背景技术:
2.旋转三维编织机是目前三维编织较为先进的设备,特别是针对大型回转预制体,其连续性高效率以及大成形尺寸能够大大提升编织效率与编织质量,并且能够大幅降低编织成本。旋转三维编织机所编织预制体能够大幅提升构件性能并实现轻量化,对航空航天、轨道交通等领域具有重要意义。因此,针对旋转三维编织机的研究一直受学术界、工业界极大关注。
3.旋转编织机结构中最重要也是最复杂的底盘传动部分一直是研究的重点。针对底盘闭环齿轮传动,为了减小齿间隙对每个轴位置精度的影响,使用多台电机驱动,同时能够分担系统惯量及扭矩。为了避免各驱动电机出现对拖超载现象,需要对各电机转速与转矩进行协同控制,以保证系统平稳精准运行,延长电机使用寿命。庄培灿等人[庄培灿,李麒阳,郗欣甫,孙以泽.径向环形编织机机电一体化系统建模及控制策略研究[j].工程设计学报,2022,29(03):347-357]针对编织机编织环主电机与滑台电机采用交叉耦合解耦控制实现转速协同,同时[庄培灿.径向环形编织机多电机协同控制策略研究[d].上海:东华大学,2022]针对编织机编织环电机组基于转矩均衡控制策略采用交叉耦合解耦控制实现转矩协同,提高电机组抗载能力,已应用于某大型径向环形编织机。但以上算法都基于系统的模型,不利于工程实际,复杂的实际模型建模难度高、精度差限制了控制算法性能的提升。
[0004]
为了进一步提升现有控制方法的控制性能,亟需解决存在强非线性、复杂参数不确定性及较大未知外干扰下的三维编织机闭环齿轮传动多电机协同控制难题,为提高编织效率、编织精度和电机使用寿命打下坚实的基础。
技术实现要素:
[0005]
本发明的目的是针对现有复合材料三维编织机多电机协同控制方法的不足,提供一种具备更优异综合控制品质且更适用于实际工程应用的协同控制方法。
[0006]
为有效解决上述难题,本发明提出一种基于时延估计技术的复合材料三维编织机多电机分数阶非奇异终端滑模协同控制方法,可采用如下技术方案:
[0007]
一种复合材料三维编织机多电机协同控制方法,包括如下步骤:
[0008]
(1)建立单交流永磁同步电机在转子d-q轴系下的数学模型:
[0009][0010][0011]
λq=l
qiq
[0012]
λd=ldid l
mdidf
[0013]
ωf=n
p
ωr[0014]
其中ud是d轴定子电压,uq是q轴定子电压;id是d轴定子电流,iq是q轴定子电流;λd是d轴定子磁链,λq是q轴定子磁链;ld是d轴定子电感,lq是q轴定子电感;ωf是d、q轴转子电转速,ωr是d、q轴机械转速;l
md
是d轴互感系数,i
df
是d轴等效励磁电流,n
p
是极对数,rs是定子电阻;
[0015]
电机所产生电磁转矩为
[0016]
te=1.5n
p
[l
mdidfiq
(l
d-lq)iqid]
[0017]
电机的动力学模型为
[0018][0019]
其中t
l
是电机的负载转矩,bm是粘滞摩擦系数,j是转动惯量;
[0020]
为简化系统模型,基于磁场定向控制,有则电机电磁转矩简化为
[0021]
te=1.5n
p
l
mdidfiq
[0022]
将电机动力学方程与上式结合,则有
[0023][0024]
(2)将步骤(1)中给出的上述电机动力学模型变形为以下形式
[0025]
其中h为系统集总未知不确定性动态,是待设计的正对角参数矩阵;h的定义如下
[0026][0027]
(3)定义速度跟踪误差其中为n台电机的期望速度,ωr∈rn×1是n台电机的实际速度;
[0028]
设计协同误差和为es=te;耦合误差为ec=e γes=(1 γt)e
[0029]
其中t为设计的协同矩阵,γ为对角矩阵系数;协同矩阵t定义为
[0030][0031]
其中n为用于协同控制的电机数量;
[0032]
(4)基于步骤(3)所设计耦合误差,设计如下分数阶非奇异终端滑模超平面
[0033][0034]
其中k1,k2,α1,α2,β1,β2为待设计的控制参数矩阵/向量,且有0《α
1i
,α
2i
<1,0《β
1i
,β
2i
<1,k
1i
>0,k
2i
>0,i=1~n;>0,i=1~n;为分数阶微积分算子;
[0035]
定义以下快速终端滑模趋近律
[0036][0037]
其中μ1,μ2,γ为待设计的控制参数矩阵/向量,且其各元素均为正值;
[0038]
(5)基于步骤(4)所提分数阶非奇异终端滑模超平面和快速终端滑模趋近律,得到所提控制算法为:
[0039][0040][0041]
其中为h的估计值;
[0042]
(6)在步骤(5)的基础上,采用时延估计技术估算h以得到
[0043][0044]
其中x
(t-l)
代表变量x在时刻(t-l)处的值,l为延时长度选取为1个或若干采用周期;
[0045]
(7)结合步骤(5)和步骤(6)所得结果,得到所提基于时延估计的复合材料三维编织机多电机协同控制方法:
[0046][0047]
本发明的有益效果:受益于采用的时延估计技术,所设计协同控制方法无需系统动力模型,大幅提升了协同控制方法的工程易用性和实际应用价值;与此同时,所设计分数阶非奇异终端滑模超平面和应用的快速终端滑模趋近律亦可保障协同控制具有良好的控制精度和较好动态响应品质。
附图说明
[0048]
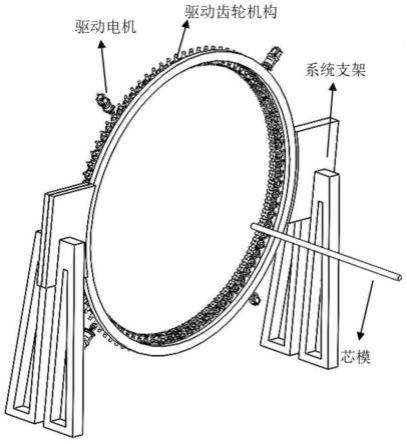
图1复合材料三维编织机结构示意图;
[0049]
图2为复合材料三维编织机中齿轮驱动机构与驱动电机部分的立体图;
[0050]
图3为齿轮驱动机构与驱动电机配合的示意图;
[0051]
图4为具体实施本发明所述算法和基于时延估计的常规线性滑模控制方法的速度期望轨迹仿真图;
[0052]
图5为具体实施本发明所述算法和基于时延估计的常规线性滑模控制方法的轨迹跟踪误差对比仿真图;
[0053]
图6为具体实施本发明所述算法和基于时延估计的常规线性滑模控制方法的轨迹耦合跟踪误差对比仿真图。
具体实施方式
[0054]
下面结合附图进一步阐述本发明,以下实例仅用于描述本发明而不用于限制本发明的使用范围,各领域工程技术人员对本发明的各种等价变换均包含在本发明所要求的权
利范围内。
[0055]
如图1至图3所示,为本实施例中采用的复合材料三维编织机,包括系统支架、驱动齿轮机构、驱动电机。其中,本实施例中的三维编织机中采用四个交流永磁同步电机作为驱动电机使驱动齿轮机构转动。其中,齿轮驱动机构包括若干齿轮,该若干齿轮相邻啮合而形成环状的齿轮,四个驱动电机在圆周方向间隔90
°
均匀布置,对应该四个驱动电机位置的四个齿轮作为主动齿轮,该四个主动齿轮分别与四个驱动电机的输出轴连接并通过驱动电机的驱动而转动。四个驱动电机同时驱动,通过齿轮传动闭环连接,实现对圆周结构上携纱器的闭环驱动。
[0056]
本实施例提供对上述一类复合材料三维编织机多电机协同控制方法,具体实施步骤如下:
[0057]
以图1中多交流永磁同步电机驱动的复合材料三维编织机构建基于时延估计技术的控制方法,包括如下步骤:
[0058]
首先建立一种新型交流永磁同步电机动力学方程:
[0059]
(1)建立单交流永磁同步电机(permanent magnet synchronous motor,pmsm)在转子d-q轴系下的数学模型:
[0060][0061][0062]
λq=l
qiq
[0063]
λd=ldid l
mdidf
[0064]
ωf=n
p
ωr[0065]
其中ud,uq是d,q轴定子电压;id,iq是d,q轴定子电流;λd,λq是d,q轴定子磁链;ld,lq是d,q轴定子电感;ωf,ω
r d,q轴转子电转速和机械转速;l
md
是d轴互感系数,i
df
是d轴等效励磁电流,n
p
是极对数,rs是定子电阻。
[0066]
电机所产生电磁转矩为
[0067]
te=1.5n
p
[l
mdidfiq
(l
d-lq)iqid]
[0068]
电机的动力学模型可以写为
[0069][0070]
其中t
l
是电机的负载转矩,bm是粘滞摩擦系数,j是转动惯量。
[0071]
为简化系统模型,基于磁场定向控制,有则电机电磁转矩可简化为
[0072]
te=1.5n
p
l
mdidfiq
[0073]
将电机动力学方程与上式结合,则有
[0074][0075]
(2)将步骤(1)中给出的上述电机动力学模型变形为以下形式
[0076][0077]
其中h为系统集总未知不确定性动态,是待设计的正对角参数矩阵。h的定义如下
[0078][0079]
在上述新形式pmsm动力学方程的基础上,继续设计一种基于时延估计的复合材料三维编织机多电机协同控制方法包括:
[0080]
(3)定义速度跟踪误差其中为n台电机的期望速度,ωr∈rn×1是n台电机的实际速度。
[0081]
设计协同误差和耦合误差为
[0082]es
=te
[0083]
ec=e γes=(1 γt)e
[0084]
其中t为设计的协同矩阵,γ为对角矩阵系数。协同矩阵t定义为
[0085][0086]
其中n为用于协同控制的电机数量。所设计的协同误差将当前控制轴的误差与其他所有轴的误差相关联,可有效保证协同控制的品质。
[0087]
(4)基于步骤(3)所设计耦合误差,为保证复合材料三维编织机高品质的多电机协同控制,设计如下分数阶非奇异终端滑模超平面
[0088][0089]
其中k1,k2,α1,α2,β1,β2为待设计的控制参数矩阵/向量,且有0《α
1i
,α
2i
<1,0《β
1i
,β
2i
<1,k
1i
>0,k
2i
>0,i=1~n。>0,i=1~n。为分数阶微积分算子。
[0090]
定义以下快速终端滑模趋近律
[0091][0092]
其中μ1,μ2,c为待设计的控制参数矩阵/向量,且其各元素均为正值。
[0093]
(5)基于步骤(4)所提分数阶非奇异终端滑模超平面和快速终端滑模趋近律,得到所提控制算法为:
[0094][0095][0096]
其中为h的估计值,由于h非常复杂且时变,因此采用在线辨识、自适应技术等常规技术不利于实际工程应用。
[0097]
(6)在步骤(5)的基础上,采用时延估计技术估算h以得到
[0098]
[0099]
其中x
(t-l)
代表变量x在时刻(t-l)处的值,l为延时长度一般选取为1个或若干采用周期。
[0100]
(7)结合步骤(5)和步骤(6)所得结果,得到所提基于时延估计的复合材料三维编织机多电机协同控制方法:
[0101][0102][0103]
由上述所提复合材料三维编织机多电机协同控制方法可以看出,其不基于系统动力学模型,应用复杂工况下的工程应用。
[0104]
对所发明的协同控制方法进行稳定性分析
[0105]
(1)取李雅普诺夫函数为v=0.5s
t
s,对其求导,并代入协同控制器,得到
[0106][0107]
其中被定义为时延估计误差;由时延估计理论可知,ε是有界的。
[0108]
上式可以重新写为以下两种形式,即有
[0109][0110][0111]
其中
[0112]
对于第一种形式,利用不等式(b
12
…
b
n2
)a≤(b
1a
…
b
na
)2,0<a<2,bi>0,并将v=s
t
s/2代入第一种形式,有
[0113][0114]
其中λ
min
(μ2)是μ2的最小特征值。则s的稳定时间为
[0115][0116]
因此,针对第一种形式,当λ
min
(μ2)>0时,系统轨迹将持续趋向分数阶非奇异终端滑模超平面,直到同理,针对第二种形式进行分析,可得到最终有,系统轨迹将在有限时间内收敛至以下球域
[0117]
||s||≤δ=min{δ1,δ2},
[0118][0119]
(2)证明耦合误差ec的有界性。
[0120]
所设计的分数阶非奇异终端滑模超平面可以重写为以下形式
[0121][0122]
采用(1)中的分析思路与步骤,上述公式可以重写为以下两种形式
[0123][0124][0125]
对于第一种形式,当成立时,其将继续保持分数阶非奇异终端滑模超平面的形式,则有系统轨迹将持续趋向平衡点至则利用分数阶微积分理论可知,系统耦合误差将在有限时间内收敛至其中ki和σi是由微积分算子特性决定的系数。由此,耦合误差ec的有界性得到了证明。
[0126]
(3)证明系统跟踪误差e的有界性。
[0127]
重写系统耦合误差定义,得到其中i是单位对角矩阵。则可以看出故系统跟踪误差e的有界性得到了证明。
[0128]
为验证所发明复合材料三维编织机协同控制方法的有效性,将其与常规的基于时延估计技术的线性滑模控制器进行对比仿真研究。仿真平台为win10 64位操作系统下的matlab 2016b,仿真对象为四台交流永磁同步电机的协同控制,其动力学模型可以写为
[0129][0130]
其中四台电机动力学参数均为j=0.005,bm=0.002,n
p
=4,l
md
=0.17,i
df
=5.4,t
l
和d分别为电机所受到负载转矩和集总外干扰,其取值为t
l
=a
t
*sin(2π/t
t
),a
t
=[2,4,6,8]
t
×
10-4
n.m,t
t
=[1,2,3,4]s;d=ad*sin(2π/td),ad=[1,2,3,4]
t
×
10-4
n.m,t
t
=[0.5,1,1.5,2]s。控制参数选取如下,k1=k2=γ=i,α1=α2=β1=β2=c=0.8*[1,1,1,1]
t
,μ1=μ2=2i,ωr初始值设定为0,时延l=1ms,仿真步长设置为1ms,采用ode4(runge-kutta)解算器。为获取基于时延估计技术的常规线性滑模控制器并保证对比仿真的公平性,取α1=α2=β1=β2=c=[1,1,1,1]
t
,其他控制参数保持不变。相应仿真对比结果见图4~6,仿真结果中图4为期望速度轨迹,图5-图6分别为四台电机跟踪误差及耦合误差,其中实线为本发明所提控制方法,点划线为常规线性滑模。
[0131]
从仿真结果可以看出,本发明所述算法在同等参数条件下可以保证更快的收敛特性、更高的控制精度、更好的协同控制效果。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。