技术特征:
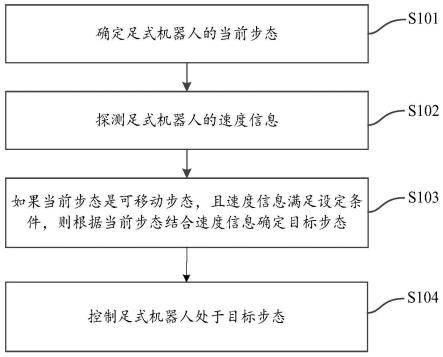
1.一种足式机器人的控制方法,其特征在于,所述方法包括:确定足式机器人的当前步态;探测所述足式机器人的速度信息;如果所述当前步态是可移动步态,且所述速度信息满足设定条件,则根据所述当前步态结合所述速度信息确定目标步态;控制所述足式机器人处于所述目标步态。2.如权利要求1所述的方法,其特征在于,所述如果所述当前步态是可移动步态,且所述速度信息满足设定条件,则根据所述当前步态结合所述速度信息确定目标步态,包括:如果所述当前步态是可移动步态,且所述速度信息是目标信息,则确定所述目标步态是站立态,所述目标信息指示:所述足式机器人的速度是零速度;如果所述当前步态是可移动步态,且所述速度信息不是所述目标信息,则控制所述足式机器人保持所述当前步态。3.如权利要求2所述的方法,其特征在于,在所述确定所述目标步态是站立态之后,还包括:控制所述足式机器人由所述当前步态切换至所述站立态。4.如权利要求3所述的方法,其特征在于,在所述控制所述足式机器人由所述当前步态切换至所述站立态之后,还包括:将所述当前步态保存至所述足式机器人的存储装置之中。5.如权利要求4所述的方法,其特征在于,在所述控制所述足式机器人由所述当前步态切换至所述站立态之后,还包括:实时地探测所述足式机器人的速度信息,以得到新速度信息;如果所述新速度信息不是所述目标信息,则从所述存储装置之中读取所述当前步态;控制所述足式机器人由所述站立态切换为所述当前步态。6.如权利要求1所述的方法,其特征在于,还包括:如果所述当前步态不是所述可移动步态,或所述速度信息不满足所述设定条件,则持续地执行所述确定足式机器人的当前步态的步骤。7.一种足式机器人的控制装置,其特征在于,所述装置包括:第一确定模块,用于确定足式机器人的当前步态;探测模块,用于探测所述足式机器人的速度信息;第二确定模块,用于在所述当前步态是可移动步态,且所述速度信息满足设定条件时,根据所述当前步态结合所述速度信息确定目标步态;控制模块,用于控制所述足式机器人处于所述目标步态。8.如权利要求7所述的装置,其特征在于,所述第二确定模块,具体用于:如果所述当前步态是可移动步态,且所述速度信息是目标信息,则确定所述目标步态是站立态,所述目标信息指示:所述足式机器人的速度是零速度;如果所述当前步态是可移动步态,且所述速度信息不是所述目标信息,则控制所述足式机器人保持所述当前步态。9.如权利要求8所述的装置,其特征在于,所述第二确定模块,还用于:在所述确定所述目标步态是站立态之后,控制所述足式机器人由所述当前步态切换至
所述站立态。10.如权利要求9所述的装置,其特征在于,还包括:保存模块,用于在所述控制所述足式机器人由所述当前步态切换至所述站立态之后,将所述当前步态保存至所述足式机器人的存储装置之中。11.如权利要求10所述的装置,其特征在于,所述第二确定模块,还用于:在所述控制所述足式机器人由所述当前步态切换至所述站立态之后,实时地探测所述足式机器人的速度信息,以得到新速度信息;如果所述新速度信息不是所述目标信息,则从所述存储装置之中读取所述当前步态;控制所述足式机器人由所述站立态切换为所述当前步态。12.如权利要求7所述的装置,其特征在于,还包括:执行模块,用于在所述当前步态不是所述可移动步态,或所述速度信息不满足所述设定条件时,持续地执行所述确定足式机器人的当前步态的步骤。13.一种机器人,其特征在于,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如权利要求1-6中任一项所述的足式机器人的控制方法。14.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-6中任一项所述的足式机器人的控制方法。
技术总结
本申请提出一种足式机器人的控制方法、装置、机器人及存储介质,该方法包括:确定足式机器人的当前步态;探测足式机器人的速度信息;如果当前步态是可移动步态,且速度信息满足设定条件,则根据当前步态结合速度信息确定目标步态;控制足式机器人处于目标步态。通过本申请,能够有效地减少无意义的移动步态,有效地节约足式机器人的控制资源,避免引入抖动,有效地提升足式机器人的控制性能。效地提升足式机器人的控制性能。效地提升足式机器人的控制性能。
技术研发人员:徐海望
受保护的技术使用者:北京小米移动软件有限公司
技术研发日:2021.08.06
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。