技术特征:
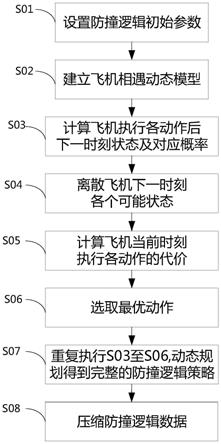
1.一种无人机机载防撞逻辑设计方法,其特征在于,包括以下步骤:步骤一、设置防撞逻辑初始参数;步骤二、根据防撞逻辑初始参数建立飞机相遇动态模型;步骤三、根据设定的转弯率和飞机相遇动态模型,计算飞机执行各动作后下一时刻状态及对应概率;步骤四、将所述步骤三中下一时刻状态离散至状态空间的各个离散点上,并计算转移概率,将对应概率和转移概率综合,得到最终的离散状态转移概率;步骤五、根据所述步骤四中的结果,计算飞机当前时刻执行各动作的代价;步骤六、根据所述步骤五中的各动作的代价值,选取最优动作;步骤七、重复执行所述步骤三至所述步骤六,通过动态规划得到完整的防撞逻辑策略。2.根据权利要求1所述的无人机机载防撞逻辑设计方法,其特征在于,所述步骤二具体为:飞机相遇过程中的状态为:离散的动态模型为:x(t δt)=f[x(t),a(t),w(t)];飞机的运动方程f(
·
)为:其中,w(t)是一个表示飞机水平方向转弯率噪声的随机变量,a(t)是本机当前时刻执行的动作,ρ为两机之间的水平距离,θ为本机相对于入侵机的方位角,为入侵机的相对航向角,v
own
和v
int
分别为本机和入侵机的速度,u
own
和u
int
分别为本机和入侵机的转弯速率,τ为两架飞机到垂直方向距离为0时所需要的时间。x
′
own
、y
′
own
、x
′
int
和y
′
int
分别为本机和入侵机的x和y方向的速度。3.根据权利要求2所述的无人机机载防撞逻辑设计方法,其特征在于,所述步骤三具体为:利用有限个sigma采样点表示飞机处在离散状态s(t)时执行动作集内各动作后的转弯率,根据这些转弯率对可以得到下一时刻状态为:则该时刻状态下对应的概率为:
其中,n为采样点个数。4.根据权利要求3所述的无人机机载防撞逻辑设计方法,其特征在于,所述步骤四具体为:利用多线性插值法将下一时刻各个可能状态x
n
(t δt)转移到离散状态空间的各个离散状态点s
′
(t δt)上,并计算其转移概率为pr(s
′
(t δt)|x
n
(t δt)),可以得到飞机处在离散状态s(t)时执行动作a(t),下一时刻转移到离散状态s
′
(t δt)的概率为5.根据权利要求4所述的无人机机载防撞逻辑设计方法,其特征在于,所述步骤五具体为:在离散状态s(t)执行动作a(t)的代价为其中,c[s(t),a(t)]为根据执行动作类型和判断是否发生近空碰撞计算得到的固定代价。6.根据权利要求5所述的无人机机载防撞逻辑设计方法,其特征在于,所述步骤六具体为:在离散状态s(t)执行各个动作的最优期望代价为则在离散状态s(t)的最优防撞策略满足7.根据权利要求1至6中任一项所述的无人机机载防撞逻辑设计方法,其特征在于,所述无人机机载防撞逻辑设计方法还包括步骤八:对所述步骤七中的逻辑数据进行压缩处理。
技术总结
本发明提供一种无人机机载防撞逻辑设计方法,包括以下步骤:步骤一、设置防撞逻辑初始参数;步骤二、根据防撞逻辑初始参数建立飞机相遇动态模型;步骤三、根据设定的转弯率和飞机相遇动态模型,计算飞机执行各动作后下一时刻状态及对应概率;步骤四、将步骤三中下一时刻状态离散至状态空间的各个离散点上,并计算转移概率,将对应概率和转移概率综合,得到最终的离散状态转移概率;步骤五、根据步骤四中的结果,计算飞机当前时刻执行各动作的代价;步骤六、根据步骤五中的各动作的代价值,选取最优动作;步骤七、重复执行步骤三至步骤六,通过动态规划得到完整的防撞逻辑策略。过动态规划得到完整的防撞逻辑策略。过动态规划得到完整的防撞逻辑策略。
技术研发人员:钱君 张丹妍 史达亮
受保护的技术使用者:中国航空工业集团公司雷华电子技术研究所
技术研发日:2022.10.19
技术公布日:2023/2/23
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。