1.本发明涉及机器人技术领域,特别涉及一种扫地机器人。
背景技术:
2.现有技术中,扫地机器人可以实现湿拖以及清洁等功能,受到用户的欢迎。但是,目前扫地机器人的拖布组价虽然可以自动升降,但是自动升降的高度太少,在长毛毯地面行走清洁时,依然会弄脏毛毯,这种情况则需用户人工拆卸下拖布组件;虽然,有的扫地机器人具有可拆卸拖布组件的基座,但是基座上活动机构外漏,易被用户损坏,可靠性差。
技术实现要素:
3.本发明提供了一种扫地机器人,上述扫地机器人能够实现拖布组件的自动拆卸,提高用户体验感,并且,能够提高扫地机器人的可靠性以及使用寿命。
4.为达到上述目的,本发明提供以下技术方案:
5.一种扫地机器人,包括:机器人本体以及维护站;
6.所述机器人本体包括底壳以及可拆卸的安装于所述底壳上的拖布组件,所述底壳上设置有用于固定所述拖布组件的第一固定部,所述拖布组件包括拖布支架以及设置于所述拖布支架上的拖布,所述拖布支架上设置有可与所述第一固定部配合锁定的第二固定部;
7.所述维护站包括底板、设置于所述底板上的防护壳、拆卸组件和驱动组件,所述防护壳与所述底板配合围成用于放置所述机器人本体的维护腔,所述维护腔的开口的朝向与所述底板的延伸方向平行,所述防护壳内部形成有容置空间,所述拆卸组件具有第一状态和第二状态,所述驱动组件位于所述容置空间内、用于驱动所述拆卸组件在第一状态和第二状态之间切换;
8.当所述拆卸组件处于所述第一状态时,所述拆卸组件位于所述容置空间内;
9.当所述拆卸组件位于所述第二状态时,所述拆卸组件可由防护壳上的通孔伸入所述维护腔内,以使位于所述维护腔内的所述机器人本体上的所述第一固定部和所述第二固定部解除锁定。
10.本发明实施例提供的扫地机器人,包括机器人本体和维护站,机器人本体的底壳与拖布组件中的拖布支架可以通过第一固定部和第二固定部的配合锁定进行固定连接,由于维护站上设置有拆卸组件和驱动组件,当需要将机器人本体上的拖布组件拆卸时,可以控制机器人本体移动到维护站的维护腔内,驱动组件可以驱动拆卸组件处于第二状态,使得拆卸组件伸入维护腔内,解除第一固定部与第二固定部之间的锁定,即解除机器人本体的底壳与拖布组件之间的固定连接,能够实现拖布组件的自动拆卸,使用方便,提高用户体验感,并且,驱动组件以及处于第一状态的拆卸组件位于维护站的防护壳的容置空间内,防护壳能够保护驱动组件和拆卸组件不易受到损坏,能够提高扫地机器人的可靠性以及使用寿命。
11.可选地,所述第二固定部包括至少一组锁扣组件,每组所述锁扣组件包括沿第一方向排列、且相互配合的第一锁扣和第二锁扣,所述锁扣组件具有卡合状态以及解除卡合状态;所述第一固定部包括与所述锁扣组件一一对应的至少一组卡钩组件,所述卡钩组件包括可与所述第一锁扣配合卡合的第一卡钩部以及可与所述第二锁扣配合卡合的第二卡钩部;
12.当所述锁扣组件处于所述卡合状态时,所述第一锁扣和第二锁扣分别与所述第一卡钩部和第二卡钩部卡合,以使所述第一固定部与所述第二固定部固定连接;
13.当所述锁扣组件处于所述解除卡合状态,所述第一锁扣和第二锁扣分别与所述第一卡钩部和第二卡钩部解除卡合,以使所述第一固定部和第二固定部解除锁定。
14.可选地,所述第一锁扣包括沿第二方向延伸的第一卡钩臂,所述第二锁扣包括沿第二方向延伸的第二卡钩臂,所述第一卡钩臂上的卡钩的弯折方向与所述第二卡钩臂上的卡钩的弯折方向相背离,所述第一方向与所述第二方向相互垂直;
15.当所述锁扣组件处于所述卡合状态时,所述第一卡钩臂与所述第二卡钩臂之间距离第一间距,所述第一卡钩臂上的卡钩和所述第二卡钩臂上的卡钩分别与所述第一卡钩部和第二卡钩部配合卡合;
16.当所述锁扣组件处于所述接触卡合状态时,所述第一卡钩臂与所述第二卡钩臂之间距离第二间距,所述第二间距小于第一间距,所述第一卡钩臂上的卡钩和所述第二卡钩臂上的卡钩分别与所述第一卡钩部和第二卡钩部解除卡合。
17.可选地,所述第一卡钩部与所述第二卡钩部相互平行设置、且所述第一卡钩部与所述第二卡钩部之间的距离大于第一距离,所述第一卡钩部的弯折方向与所述第二卡钩部的弯折方向相对,所述第一卡钩部的顶面和所述第二卡钩部的顶面形成有两个相对的第一斜面,所述第一卡钩臂的顶面与所述第二卡钩臂的顶面形成有与所述第一斜面相配合的第二斜面。
18.可选地,所述第一锁扣还包括沿第一方向延伸、且与所述第一卡钩臂远离所述第二卡钩臂的一侧连接的第一连接部,所述第二锁扣还包括沿第一方向延伸、且与所述第二卡钩臂远离所述第一卡钩臂的一侧连接的第二连接部;
19.所述拖布支架上设置有第一滑道和第二滑道,所述第一连接部与所述第一滑道可滑动连接,所述第二连接部与所述第二滑道可滑动连接。
20.可选地,所述第一连接部远离所述第一卡钩臂的一端设置有与所述第一滑道滑动连接第一限位端,所述第二连接部远离所述第二卡钩臂的一端设置有与所述第二滑道滑动连接的第二限位端;
21.所述第一滑道内具有位于所述第一限位端与所述第一卡钩臂之间、且沿所述第一限位端指向所述第一卡钩臂的方向排列的第一限位部和第二限位部;
22.所述第二滑道内具有位于所述第二限位端与所述第二卡钩臂之间、且沿所述第二限位端指向所述第二卡钩臂的方向排列的第三限位部和第四限位部;
23.所述第一限位部和第三限位部分别用于在所述锁扣组件位于所述解除卡合状态时限制所述第一限位端和第二限位端的位置,所述第二限位部和第四限位部分别用于在所述锁扣组件位于所述卡合状态时限制所述第一卡钩臂和第二卡钩臂的位置。
24.可选地,所述锁扣组件还包括第一弹簧和第二弹簧;所述第一弹簧套于所述第一
连接部位于所述第一限位端与所述第一卡钩臂之间的区域上、且远离所述第一限位端的一端固定于所述拖布支架上;所述第二弹簧套于所述第二连接部位于所述第二限位端与所述第二卡钩臂之间的区域上、且远离所述第二限位端一端固定于所述拖布支架上;
25.当所述锁扣组件处于卡合状态时,所述第一弹簧和第二弹簧处于释能状态;
26.当所述锁扣组件处于解除卡合状态时,所述第一弹簧和第二弹簧处于蓄能状态。
27.可选地,所述拆卸组件包括第一拆卸杆和第二拆卸杆,当所述机器人在所述维护腔内时,所述第一拆卸杆的第一端与所述第一连接部远离所述第一卡钩臂的一端相对,所述第二拆卸杆的第一端与所述第二连接部远离所述第二卡钩臂的一端相对;
28.当所述拆卸组件处于所述第一状态时,所述第一拆卸杆和所述第二拆卸杆位于所述容置空间内;
29.当所述拆卸组件处于所述第二状态时,所述第一拆卸杆和所述第二拆卸杆伸入所述维护腔内,所述第一拆卸杆与所述第一连接部远离所述第一卡钩臂的一端相抵以使所述第一卡钩臂朝向所述第二卡钩臂移动,所述第二拆卸杆与所述第二连接部远离所述第一卡钩臂的一端相抵以使所述第二卡钩臂朝向所述第二卡钩臂移动。
30.可选地,所述第一连接部与所述第一拆卸杆相对的区域设置有第一定位槽,所述第二连接部与所述第二拆卸杆相对的区域设置有第二定位槽。
31.可选地,所述驱动组件包括第一齿条、第二齿条、第一齿轮、第二齿轮、第一电机、第二电机;其中,
32.所述第一齿条与所述第一拆卸杆的第二端连接、且与所述第一拆卸杆的延伸方向相同,所述第一齿轮与所述第一齿条相啮合、且设置于所述第一电机的转轴上;
33.所述第二齿条与所述第二拆卸杆的第二端连接、且与所述二拆卸杆的延伸方向相同,所述第二齿轮与所述第二齿条相啮合、且设置于所述第二电机的转轴上。
34.可选地,所述容置空间内还设置有控制单元,所述控制单元用于控制所述第一电机和所述第二电机旋转。
附图说明
35.图1为本发明实施例提供的一种扫地机器人的结构示意图;
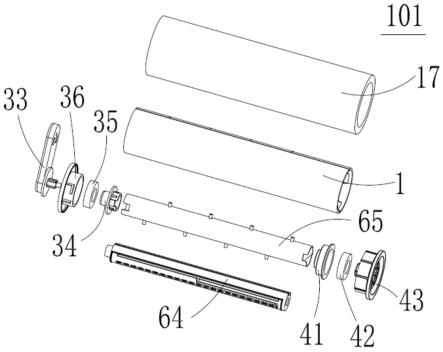
36.图2为本发明实施例提供的一种机器人本体的结构示意图;
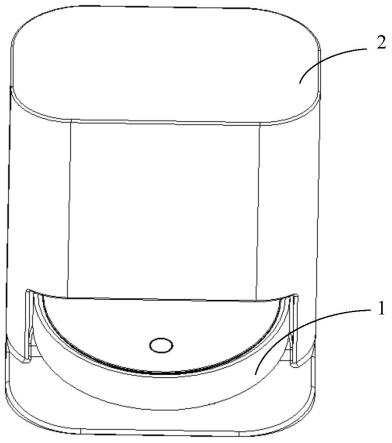
37.图3为本发明实施例提供的一种维护站的结构示意图;
38.图4为本发明实施例提供的一种拖布支架的状态示意图;
39.图5为本发明实施例提供的一种拖布支架的状态示意图;
40.图6为本发明实施例提供的一种拖布支架的部分区域的放大图。
41.图标:
42.1-机器人本体;2-维护站;21-底板;22-防护壳;221-维护腔;222-容置空间;223-通孔;3-拖布组件;31-拖布支架;311-第一滑道;311
’‑
第二滑道;312-第一限位部;313-第二限位部;312
’‑
第三限位部;313
’‑
第四限位部;41-第一卡钩臂;41
’‑
第二卡钩臂;42-第一连接部;42
’‑
第二连接部;421-第一限位端;421
’‑
第二限位端;422-第一定位槽;422
’‑
第二定位槽;43
’‑
第二弹簧;51-第一拆卸杆;51
’‑
第二拆卸杆;61-第一齿条;61
’‑
第二齿条;62-第一齿轮;62
’‑
第二齿轮;63-第一电机;63
’‑
第二电机;71
’‑
第二卡钩部。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.请参考图1、图2和图3,本发明提供一种扫地机器人,包括:机器人本体1以及维护站2;
45.机器人本体1包括底壳以及可拆卸的安装于底壳上的拖布组件3,底壳上设置有用于固定拖布组件3的第一固定部,拖布组件3包括拖布支架31以及设置于拖布支架31上的拖布,拖布支架31上设置有可与第一固定部配合锁定的第二固定部;
46.维护站2包括底板21、设置于底板21上的防护壳22、拆卸组件和驱动组件,防护壳22与底板21配合围成用于放置机器人本体1的维护腔221,维护腔221的开口的朝向与底板21的延伸方向平行,防护壳22内部形成有容置空间222,拆卸组件具有第一状态和第二状态,驱动组件位于容置空间222内、用于驱动拆卸组件在第一状态和第二状态之间切换;
47.当拆卸组件处于第一状态时,拆卸组件位于容置空间222内;
48.当拆卸组件位于第二状态时,拆卸组件可由防护壳22上的通孔223伸入维护腔221内,以使位于维护腔221内的机器人本体1上的第一固定部和第二固定部解除锁定。
49.本发明实施例提供的扫地机器人,包括机器人本体1和维护站2,机器人本体1的底壳与拖布组件3中的拖布支架31可以通过第一固定部和第二固定部的配合锁定进行固定连接,由于维护站2上设置有拆卸组件和驱动组件,当需要将机器人本体1上的拖布组件3拆卸时,可以控制机器人本体1移动到维护站2的维护腔221内,驱动组件可以驱动拆卸组件处于第二状态,使得拆卸组件伸入维护腔221内,解除第一固定部与第二固定部之间的锁定,即解除机器人本体1的底壳与拖布组件3之间的固定连接,能够实现拖布组件3的自动拆卸,使用方便,提高用户体验感,并且,驱动组件以及处于第一状态的拆卸组件位于维护站2的防护壳22的容置空间222内,防护壳22能够保护驱动组件和拆卸组件不易受到损坏,能够提高扫地机器人的可靠性以及使用寿命。
50.上述发明实施例提供的扫地机器人中,第二固定部可以包括至少一组锁扣组件,每组锁扣组件包括沿第一方向排列、且相互配合的第一锁扣和第二锁扣,锁扣组件具有卡合状态以及解除卡合状态;第一固定部可以包括与锁扣组件一一对应的至少一组卡钩组件,卡钩组件包括可与第一锁扣配合卡合的第一卡钩部以及可与第二锁扣配合卡合的第二卡钩部;当锁扣组件处于卡合状态时,第一锁扣和第二锁扣分别与第一卡钩部和第二卡钩部卡合,以使第一固定部与第二固定部固定连接;当锁扣组件处于解除卡合状态,第一锁扣和第二锁扣分别与第一卡钩部和第二卡钩部解除卡合,以使第一固定部和第二固定部解除锁定。
51.上述发明实施例提供的扫地机器人中,可以通过使得第一固定部中锁扣组件的第一锁扣与第二锁扣分别与第二固定部中卡钩组件的第一卡钩部和第二卡钩部配合卡合使得底壳与拖布组件3固定,使得扫地机器人在清洁地板和瓷砖地面时,实现湿拖功能;且可以通过驱动组件驱动拆卸组件使得第一固定部中锁扣组件与第二固定部中卡钩组件解除卡合,使得第一固定部和第二固定部解除锁定,能够实现拖布组件3的自动拆卸,使得扫地
机器人方便对地毯进行清扫,不会因为潮湿的拖布组件3弄湿地毯。
52.在一种具体地实施方式中,如图4和图5所示,第一锁扣可以包括沿第二方向延伸的第一卡钩臂41,第二锁扣可以包括沿第二方向延伸的第二卡钩臂41’,第一卡钩臂41上的卡钩的弯折方向可以设置为与第二卡钩臂41’上的卡钩的弯折方向相背离,第一方向与第二方向相互垂直;如图4所示,当锁扣组件处于卡合状态时,第一卡钩臂41与第二卡钩臂41’之间距离第一间距,第一卡钩臂41上的卡钩和第二卡钩臂41’上的卡钩分别与第一卡钩部和第二卡钩部配合卡合;而如图5所示,当锁扣组件处于接触卡合状态时,第一卡钩臂41与第二卡钩臂41’之间距离第二间距,第二间距小于第一间距,第一卡钩臂41上的卡钩和第二卡钩臂41’上的卡钩分别与第一卡钩部和第二卡钩部解除卡合。
53.上述发明实施例提供的扫地机器人中,可以通过第一卡钩臂41上的卡钩与第一卡钩部卡合、第二卡钩臂41’上的卡钩与第二卡钩部卡合,实现机器人本体1的底壳和拖布组件3的固定,而通过拆卸组件使得第一卡钩臂41与第二卡钩臂41’之间的距离减小,使得第一卡钩臂41与第一卡钩部以及第二卡钩臂41’与第二卡钩部解除卡合,能够完成机器人本体1的底壳和拖地组件的拆卸。
54.在一种具体地实施方式中,如图6所示,第一卡钩部与第二卡钩部71’可以相互平行设置、且第一卡钩部与第二卡钩部71’之间的距离大于第一距离,第一卡钩部的弯折方向与第二卡钩部71’的弯折方向相对,第一卡钩部的顶面和第二卡钩部71’的顶面形成有两个相对的第一斜面,第一卡钩臂41的顶面与第二卡钩臂41’的顶面形成有与第一斜面相配合的第二斜面。上述扫地机器人中,当锁扣组件处于卡合状态时,第一卡钩部和第二卡钩部71’上的第一斜面与所述第一卡钩臂41和所述第二卡钩臂41’上的第二斜面通过互滑挤压后,可以使得第一卡钩部与第一卡钩臂41卡合、第二卡钩部与第二卡钩臂41’卡合,拖布组件3固定于机器人本体1的底板21上。
55.在一种具体地实施方式中,第一锁扣还可以包括沿第一方向延伸、且与第一卡钩臂41远离第二卡钩臂41’的一侧连接的第一连接部42,第二锁扣还可以包括沿第一方向延伸、且与第二卡钩臂41’远离第一卡钩臂41的一侧连接的第二连接部42’;拖布支架31上设置有第一滑道311和第二滑道311’,第一连接部42与第一滑道311可滑动连接,第二连接部42’与第二滑道311’可滑动连接。拆卸组件可以通过控制第一锁扣的第一连接部42和第二锁扣的第二连接部42’分别在第一滑道311和第二滑道311’上移动,实现第一卡钩臂41和第二卡钩臂41’之间距离的调节,进而实现锁扣组件卡合状态和解除卡合状态之间转换。
56.在一种具体地实施方式中,第一连接部42远离第一卡钩臂41的一端可以设置有与第一滑道311滑动连接第一限位端421,第二连接部42’远离第二卡钩臂41’的一端可以设置有与第二滑道311’滑动连接的第二限位端421’;第一滑道311内可以具有位于第一限位端421与第一卡钩臂41之间、且沿第一限位端421指向第一卡钩臂41的方向排列的第一限位部312和第二限位部313;第二滑道311’内可以具有位于第二限位端421’与第二卡钩臂41’之间、且沿第二限位端421’指向第二卡钩臂41’的方向排列的第三限位部312’和第四限位部313’;其中,第一限位部312和第三限位部312’分别用于在锁扣组件位于解除卡合状态时限制第一限位端421和第二限位端421’的位置,第二限位部313和第四限位部313’分别用于在锁扣组件位于卡合状态时限制第一卡钩臂41和第二卡钩臂41’的位置。具体地,当锁扣组件处于解除卡合状态时,第一限位部312和第三限位部312’分别限制第一限位端421和第二限
位端421’的位置,以避免第一连接部42和第二连接部42’脱离第一滑道311和第二滑道311’;而当锁扣组件处于卡合状态时,第二限位部313和第四限位部313’分别限制第一卡钩臂41和第二卡钩臂41’的位置,能够保证第一卡钩臂41和第二卡钩臂41’之间的距离为第一距离,方便第一固定部中的第一卡钩部和第二卡钩部在锁扣组件处于卡合状态时分别与第一卡钩臂41和第二卡钩臂41’进行卡合。
57.在一种具体地实施方式中,如图6所示,锁扣组件还可以包括第一弹簧和第二弹簧43’;第一弹簧套于第一连接部42位于第一限位端421与第一卡钩臂41之间的区域上、且远离第一限位端421的一端固定于拖布支架31上;第二弹簧套于第二连接部42’位于第二限位端421’与第二卡钩臂41’之间的区域上、且远离第二限位端421’一端固定于拖布支架31上;当锁扣组件处于卡合状态时,第一弹簧和第二弹簧处于释能状态;当锁扣组件处于解除卡合状态时,第一弹簧和第二弹簧处于蓄能状态。
58.上述发明实施例提供的扫地机器人中,当拆卸组件伸入维护腔221内对拖布组件3进行拆卸时,拆卸组件使得锁扣组件处于解除卡合状态,第一锁扣上的第一弹簧和第二锁扣上的第二弹簧处于蓄能状态;而当拆卸组件收回至防护壳22的容置空间222时,蓄能状态的第一弹簧和第二弹簧可以将第一锁扣和第二锁扣推回至锁扣组件处于卡合状态的位置,拖布组件3可在维护腔221内平整的摆放,当锁扣组件处于卡合状态时,锁扣组件可与底壳上的卡钩组件进行卡合,实现底壳和拖布组件3之间的固定。
59.上述发明实施例提供的扫地机器人中,第一锁扣和第二锁扣可以临近拖布支架31的边缘设置,能够使得维护站2上的拆卸组件方便对机器人本体1上的拖布组件3的拆卸。
60.上述发明实施例提供的扫地机器人中,拆卸组件可以包括第一拆卸杆51和第二拆卸杆51’,当机器人在维护腔221内时,第一拆卸杆51的第一端与第一连接部42远离第一卡钩臂41的一端相对,第二拆卸杆51’的第一端与第二连接部42
‘
远离第二卡钩臂41’的一端相对;当拆卸组件处于第一状态时,第一拆卸杆51和第二拆卸杆51’位于容置空间222内;当拆卸组件处于第二状态时,第一拆卸杆51和第二拆卸杆51’可以伸入维护腔221内,第一拆卸杆51可以与第一连接部42远离第一卡钩臂41的一端相抵以使第一卡钩臂41朝向第二卡钩臂41’移动,第二拆卸杆51’可以与第二连接部42
‘
远离第一卡钩臂41的一端相抵以使第二卡钩臂41’朝向第二卡钩臂41’移动。
61.上述拆卸组件中,第一拆卸杆51和第二拆卸杆51’伸入到维护腔221时,第一拆卸杆51和第二拆卸杆51’可以分别推动第一连接部42和第二连接部42
‘
使得第一卡钩臂41和第二卡钩臂41’移动,使得第一卡钩臂41和第二卡钩臂41’解除与第一卡钩部和第二卡钩部71’的卡合,进而实现拖布组件3的拆卸。
62.在一种具体地实施方式中,第一连接部42与第一拆卸杆51相对的区域设置有第一定位槽422,第二连接部42’与第二拆卸杆51’相对的区域设置有第二定位槽422’,第一定位槽422和第二定位槽422’能够保证第一拆卸杆51和第二拆卸杆51’分别与第一连接部42和第二连接部42’的端部精确定位,能够保证第一拆卸杆51和第二拆卸杆51’在拆卸拖布组件3时不脱离第一链接部和第二连接部42’。
63.在一种具体地实施方式中,驱动组件具体可以包括第一齿条61、第二齿条61’、第一齿轮62、第二齿轮62’、第一电机63、第二电机63’;其中,第一齿条61与第一拆卸杆51的第二端连接、且与第一拆卸杆51的延伸方向相同,第一齿轮62与第一齿条61相啮合、且设置于
第一电机63的转轴上;第二齿条62’与第二拆卸杆51’的第二端连接、且与二拆卸杆的延伸方向相同,第二齿轮62’与第二齿条61’相啮合、且设置于第二电机63’的转轴上。
64.上述驱动组件中,第一电机63的转轴沿第一预设方向旋转时,第一电机63可以带动第一齿轮62旋转,第一齿轮62可以带动第一齿条61移动,使得第一拆卸杆51伸入维护腔221中,第一拆卸杆51推动第一锁扣朝向第二锁扣移动,而第二电机63’的转轴沿第二预设方向旋转时,第二电机63’可以带动第二齿轮62’旋转,第二齿轮62’可以带动第二齿条61’移动,使得第二拆卸杆51’伸入维护腔221中,第二拆卸杆51’推动第二锁扣朝向第一锁扣移动,进而使得第一锁扣和第二锁扣处于解除卡合状态,实现底壳上的拖布组件3的自动拆卸;而当第一电机63和第二电机63’分别朝向与第一预设方向和第二预设方向相反的方向旋转时,第一齿条61和第二齿条61’的移动能够带动第一拆卸杆51和第二拆卸杆51’收回至容置空间222内。
65.在一种具体地实施方式中,容置空间222内还设置有控制单元,控制单元用于控制第一电机63和第二电机63’旋转。控制单元能够通过控制第一电机63和第二电机63’的旋转方向,进而控制拆卸组件中第一拆卸杆51和第二拆卸杆51’的状态。
66.在一种可能的实施方式中,底板21上可以设置有沿维护腔221开口的朝向延伸的至少一条对位槽,拖布支架31临近底板21的一侧可以设置有与对位槽一一对应的对位部,在机器人本体1朝向维护腔221内移动的过程中,能够通过对位部和对位槽一一对应配合,实现机器人本体1和维护腔221的对位。
67.上述发明实施例提供的扫地机器人,拖布组件3固定于底壳上时,机器人能对瓷砖地面或者地板地面进行清洁或者湿拖,而扫地机器人清洁完瓷砖或者地板地面后,在接收到下一步需要清洁毛毯区域时,扫地机器人则回到维护站2的维护腔221中,扫地机器人将接收到的指令反馈给维护站2的控制单元,控制单元可以控制第一电机63和第二电机63’旋转,带动第一齿轮62和第二齿轮62’旋转,进而带动第一齿条61上的第一拆卸杆51和第二齿条61’上的第二拆卸杆51’由伸入至维护腔221内,推动拖布支架31上的第一锁扣和第二锁扣朝向相对的方向移动,使得拖布之间上的第一锁扣和第二锁扣与底板21上的第一卡钩部和第二卡钩部71’解除卡合,此时机器人本体1离开维护站2,拖布组件3则会留在维护站2的维护腔221内,扫地机器人则可以清洁毛毯,不会因为潮湿的拖布弄湿毛毯。机器人本体1离开维护站2后,控制单元可以控制第一驱动电机和第二驱动电机再次旋转,使得第一拆卸杆51和第二拆卸杆51’收回至防护壳22内部,拖布组件3平放在维护腔221内。
68.而当机器人本体1清扫完地毯,回到维护站2充电或者加水或者清扫机器人本体1内部尘盒垃圾时,由于拖布组件3处于维护腔221的底部,当机器人本体1朝向维护腔221的内部移动时,底壳上的第一卡钩部的第一斜面和第二卡钩部71’上的第一斜面分别与第一卡钩臂41上的第二斜面和第二卡钩臂41’上的第二斜面互滑挤压,第一锁扣和第二锁扣朝向相对的方向移动,第一卡钩部和第二卡钩部71’继续移动到可与第一卡钩臂41和第二卡钩臂41’卡合的位置后,由于第一弹簧和第二弹簧43’的推力作用使得第一锁扣和第二锁扣再次回到锁扣组件处于卡合工位的位置,完成第一卡钩部和第二卡钩部71’分别与第一卡钩臂41和第二卡钩臂41’卡合,此时机器人本体1可以停止移动,此时拖布组件3就会固定到机器人本体1的底壳上。
69.本发明实施例提供的扫地机器人,能够具有更高的自动化性能,能够清洁各种环
境,在变换需要清洁的场景时,不需要人工干预,可以自动切换状态,能够提高用户体验感。
70.显然,本领域的技术人员可以对本发明实施例进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。