1.本发明涉及坐标识别方法领域,尤其涉及一种camer模组处理方法。
背景技术:
2.原来的光枪游戏可以通过捕捉crt电视的行扫描来得到我们移动的数据,这几年由于液晶电视和投影仪的流行没办法捕捉到坐标数据,就出现在电视前放一个红外sensor bar通过camera来捕捉坐标数据,或通过陀螺仪等通过姿态算法得到移动的相对数据,但是这两种方法却只能得到相对位移数据,没办法得到绝对坐标,没办法实现指哪就得到哪里的坐标,因此体验效果很差,在光枪中没有得到大规模客户的认可。
3.为解决上述问题,本申请中提出一种camer模组处理方法。
技术实现要素:
4.(一)发明目的
5.为解决背景技术中存在的技术问题,本发明提出一种camer模组处理方法,本发明首先在显示屏4个边脚上安装4个红外线元件模组发光点,其次camera模块照射显示屏,然后计算得到显示屏范围内相应的坐标值,从而计算出坐标值,通过移动camera模组就能得到不同的坐标值,增加指示的准确性。
6.(二)技术方案
7.为解决上述问题,本发明提供了一种camer模组处理方法,包括以下步骤:
8.s1、将红外线元件模组设置在显示屏的拐角处;
9.s2、采用camera模块照射显示屏;
10.s3、红外线元件模组得到显示屏显示面边框范围;
11.s4、计算得到显示屏显示面内坐标值;
12.s5、移动camera模块得到不同坐标值。
13.优选的,camera模块光标移动控制,采用倾角倾斜分级控制算法,加速度传感器在x、y、z三轴方向的最大偏转角度90
°
,分割成(0
°
,10
°
),(11
°
,20
°
),
…
,(71
°
,80
°
),(81
°
,90
°
)9和倾角等级。
14.优选的,根据预先设定的最大位移速度,即像素点/秒,再设置事先分割好的9个不同角度区间的光标移动速度,最终实现光标的定位和速度控制。
15.优选的,最大的光标位移速度为80,9个不同倾角等级对应的光标位移速度可以设置成1,10,20,30,
…
80,所以对应于传感器的轴向方向偏转角度越大,则光标的移动速度也越快,设置当偏转的角度如果小于预先设定的最小角度,则让光标停止,根据这样的逻辑设计指导思想可以避免传感器在空中由于操作的不稳定导致的认为抖动,也即算法去抖动。这里假定加速度传感器水平倾角为θ,最大位移速度为v
max
,光标位移速度为v
max
,光标位移速度为v;
16.则有v=θ*v
max
/180
°
。
17.本发明的上述技术方案具有如下有益的技术效果:
18.首先在显示屏4个边脚上安装4个红外线元件模组发光点,其次camera模块照射显示屏,然后计算得到显示屏范围内相应的坐标值,从而计算出坐标值,通过移动camera模组就能得到不同的坐标值,增加指示的准确性;做到指示后的准确性。
附图说明
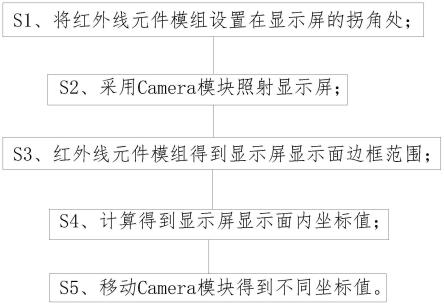
19.图1为本发明提出的一种camer模组处理方法的流程图。
具体实施方式
20.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
21.如图1所示,本发明提出的一种camer模组处理方法,包括以下步骤:
22.s1、将红外线元件模组设置在显示屏的拐角处;
23.s2、采用camera模块照射显示屏;
24.s3、红外线元件模组得到显示屏显示面边框范围;
25.s4、计算得到显示屏显示面内坐标值;
26.s5、移动camera模块得到不同坐标值。
27.在一个可选的实施例中,camera模块光标移动控制,采用倾角倾斜分级控制算法,加速度传感器在x、y、z三轴方向的最大偏转角度90
°
,分割成(0
°
,10
°
),(11
°
,20
°
),
…
,(71
°
,80
°
),(81
°
,90
°
)9和倾角等级。根据预先设定的最大位移速度,即像素点/秒,再设置事先分割好的9个不同角度区间的光标移动速度,最终实现光标的定位和速度控制。最大的光标位移速度为80,9个不同倾角等级对应的光标位移速度可以设置成1,10,20,30,
…
80,所以对应于传感器的轴向方向偏转角度越大,则光标的移动速度也越快,设置当偏转的角度如果小于预先设定的最小角度,则让光标停止,根据这样的逻辑设计指导思想可以避免传感器在空中由于操作的不稳定导致的认为抖动,也即算法去抖动。这里假定加速度传感器水平倾角为θ,最大位移速度为v
max
,光标位移速度为v
max
,光标位移速度为v;
28.则有v=θ*v
max
/180
°
。
29.需要说明的是,由倾角分级光标位移速度控制算法得到,首先需要判断读取的传感器水平倾角与预设停止角度之间的关系,当水平倾角大于预设角度时,则依据倾角分级方法计算光标位移的速度:当水平倾角小于预设角度,并且在一定时间内无变化,则停止光标的移动,存在微小的变化时,光标进行单点移动。预设角度的设置是为了更加有效的停止光标移动,因为人手的随意性,不能保证完全的水平状态,实际可能会存在微量的角度偏移,当这偏移角度在预设停止角度以内时,而且单位时间内角度保持不变,那么认为光标停止移动。
30.应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨
在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
技术特征:
1.一种camer模组处理方法,其特征在于,包括以下步骤:s1、将红外线元件模组设置在显示屏的拐角处;s2、采用camera模块照射显示屏;s3、红外线元件模组得到显示屏显示面边框范围;s4、计算得到显示屏显示面内坐标值;s5、移动camera模块得到不同坐标值。2.根据权利要求1所述的一种camer模组处理方法,其特征在于,camera模块光标移动控制,采用倾角倾斜分级控制算法,加速度传感器在x、y、z三轴方向的最大偏转角度90
°
,分割成(0
°
,10
°
),(11
°
,20
°
),
…
,(71
°
,80
°
),(81
°
,90
°
)9和倾角等级。3.根据权利要求2所述的一种camer模组处理方法,其特征在于,根据预先设定的最大位移速度,即像素点/秒,再设置事先分割好的9个不同角度区间的光标移动速度,最终实现光标的定位和速度控制。4.根据权利要求3所述的一种camer模组处理方法,其特征在于,最大的光标位移速度为80,9个不同倾角等级对应的光标位移速度可以设置成1,10,20,30,
…
80,所以对应于传感器的轴向方向偏转角度越大,则光标的移动速度也越快,设置当偏转的角度如果小于预先设定的最小角度,则让光标停止,根据这样的逻辑设计指导思想可以避免传感器在空中由于操作的不稳定导致的认为抖动,也即算法去抖动。这里假定加速度传感器水平倾角为θ,最大位移速度为vmaxr,光标位移速度为v
max
,光标位移速度为v;则有v=θ*v
max
/180
°
。
技术总结
本发明涉及坐标识别方法技术领域,且公开了一种camer模组处理方法,包括以下步骤:S1、将红外线元件模组设置在显示屏的拐角处;S2、采用Camera模块照射显示屏;S3、红外线元件模组得到显示屏显示面边框范围;S4、计算得到显示屏显示面内坐标值;S5、移动Camera模块得到不同坐标值。本发明提出一种camer模组处理方法,本发明首先在显示屏4个边脚上安装4个红外线元件模组发光点,其次Camera模块照射显示屏,然后计算得到显示屏范围内相应的坐标值,从而计算出坐标值,通过移动Camera模组就能得到不同的坐标值,增加指示的准确性。增加指示的准确性。增加指示的准确性。
技术研发人员:吕学刚
受保护的技术使用者:深圳市华海技术有限公司
技术研发日:2022.10.25
技术公布日:2023/2/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。