技术特征:
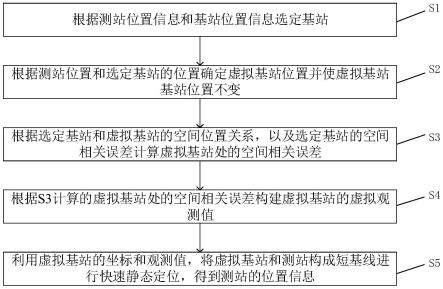
1.一种北斗带状网络虚拟基站快速定位方法,其特征在于,包括如下步骤:s1、根据测站位置信息和基站位置信息选定基站;s2、根据测站位置和选定基站的位置确定虚拟基站位置并使虚拟基站基站位置不变;s3、根据选定基站和虚拟基站的空间位置关系,以及选定基站的空间相关误差计算虚拟基站处的空间相关误差;s4、根据s3计算的虚拟基站处的空间相关误差构建虚拟基站的虚拟观测值;s5、利用虚拟基站的坐标和观测值,将虚拟基站和测站构成短基线进行快速静态定位,得到测站的位置信息。2.根据权利要求1所述的一种北斗带状网络虚拟基站快速定位方法,其特征在于,所述s2的具体方法为:s21、将测站位置投影到选定基站的连线上,得到垂足位置;s22、根据垂足位置在基站连线上建立虚拟基站,根据选定基站的已知坐标建立斜截式方程,其中,(x
m
,y
m
),(x
n
,y
n
)分别为选定基站的坐标;s23、过测站位置,以斜截式方程的斜率倒数为新的斜率,建立垂线方程,计算得到垂足坐标,表示为:其中,(x
u
,y
u
)为测站的位置坐标。3.根据权利要求1所述的一种北斗带状网络虚拟基站快速定位方法,其特征在于,所述s3中选定基站的空间相关误差计算方式为:其中,l
mu
和l
mn
分别表示虚拟基站到选定基站的距离且分别表示虚拟基站到选定基站的距离且4.根据权利要求1所述的一种北斗带状网络虚拟基站快速定位方法,其特征在于,所述s4中虚拟基站处的虚拟基站误差改正数计算方式为:v
u
=av
m
(1-a)v
n
其中,v
u
表示误差改正数;v
m
和v
n
为两基站出的大气等空间相关误差,a选定基站的空间相关误差。
技术总结
本发明公开了一种北斗带状网络虚拟基站快速定位方法,在铁路等带状网内,基于测站的位置信息与铁路沿线基站的里程信息进行最优匹配,选定两个基站。再将测站位置投影至两基站的连线上,选择测站与基站连线投影点作为虚拟基站位置,通过两个基站的空间误差线性内插得到VRS的差分改正数,VRS差分改正数与测站进行静态定位。由于考虑了空间距离相关误差的影响,可以提高测站快速静态定位精度。可以提高测站快速静态定位精度。可以提高测站快速静态定位精度。
技术研发人员:冯威 黄璐
受保护的技术使用者:北斗知行(成都)网络科技有限公司
技术研发日:2022.10.17
技术公布日:2023/2/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。