技术特征:
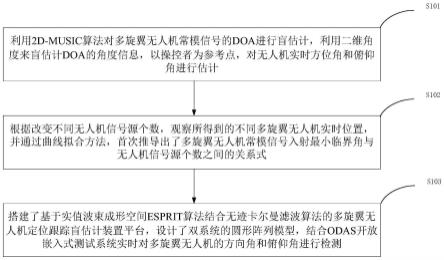
1.一种用于多旋翼无人机定位跟踪的常模信号盲估计方法,其特征在于,包括:利用2d-music算法来对多旋翼无人机常模信号的doa进行盲估计,利用二维角度来盲估计doa的角度信息,对无人机实时方位角和俯仰角进行估计;根据改变不同无人机信号源个数,观察所得到的不同多旋翼无人机实时位置;采用实值波束成形空间esprit算法、无迹卡尔曼滤波算法及odas开放嵌入式测试系统,实时对多旋翼无人机的方向角和俯仰角进行检测。2.如权利要求1所述用于多旋翼无人机定位跟踪的常模信号盲估计方法,其特征在于,具体包括:步骤一,利用2d-music算法对多旋翼无人机常模信号的doa进行盲估计,利用二维角度来盲估计doa的角度信息,以操控者为参考点,对无人机实时方位角和俯仰角进行估计;步骤二,根据不同无人机信号源个数以及观察所得到的不同多旋翼无人机实时位置,通过曲线拟合方法,推导出多旋翼无人机常模信号入射最小临界角与无人机信号源个数之间的关系式;步骤三,搭建基于实值波束成形空间esprit算法并结合无迹卡尔曼滤波算法得多旋翼无人机定位跟踪盲估计装置平台,设计双系统的圆形阵列模型,结合odas开放嵌入式测试系统对多旋翼无人机的方向角和俯仰角进行检测。3.如权利要求2所述用于多旋翼无人机定位跟踪的常模信号盲估计方法,其特征在于,所述步骤一的具体过程为:建立数学模型图,假设所设定的天线阵列为一个双向平行的天线阵列分布,其中,沿x轴方向的相邻两个阵元之间的距离为d
x
,两条平行阵列之间的距离为d
y
,第一条均匀的天线阵列是由(n 1)个信号阵元沿直线排列组成的,第二条均匀分布的直线阵列则是由n个天线阵列所组成的;假设目标空域内有p个多旋翼无人机位置信号从空间的二维方向入射到天线阵列的基站所铺设的接收传感器上,其中,分别表示方位角和俯仰角,所述方位角表示多旋翼无人机入射位置信号来波方向在xoy平面上的投影线与x轴的夹角;俯仰角表示多旋翼无人机入射位置信号来波方向在xoy平面上的投影线与入射信号来波方向之间的夹角。4.如权利要求2所述用于多旋翼无人机定位跟踪的常模信号盲估计方法,其特征在于,所述步骤二的具体过程为:(1.1)模拟不同个数得多旋翼无人机常模信号源入射的不同波达方向doa的方位角和俯仰角,信噪比均设定为10db,利用控制变量法确定在同方位角的情况下,不同俯仰角时的matlab仿真对比结果;(1.2)将仿真对比结果数据导入labview软件中,对所仿真模拟采集数据进行了排序和整理整合,通过运用最小二乘法以及利用svd算法,对所测的数据量进行曲线拟合处理;(1.3)根据labview软件导出的多项式系数,推导出多旋翼无人机个数与盲估计所得的常模信号入射最小临界角的关系式,表达式如下:y=1.51-1.38x 0.85x2式中,x表示多旋翼无人机个数,y表示盲估计所得的常模信号入射最小临界角。5.如权利要求2所述用于多旋翼无人机定位跟踪的常模信号盲估计方法,其特征在于,
所述步骤三包括如下步骤:(2.1)构建圆形阵列模型;(2.2)基于实值波束成形空间esprit算法进行doa盲估计;(2.3)基于无迹卡尔曼滤波算法进行干扰消除。6.如权利要求5所述用于多旋翼无人机定位跟踪的常模信号盲估计方法,其特征在于,所述圆形阵列模型为:写成矩阵形式为:x(t)=as(t) n(t)式中,x(t)为m
×
1维的输出数据向量;s(t)为n
×
1维的远场声源信号;n(t)为m
×
1维的噪声数据且为高斯白噪声,每一个阵元上的噪声不相关;a=[a1(w0),a2(w0),
…
,a
n
(w0)]为m
×
n维圆形阵列矩阵,a
i
(w0),i=1,2,
…
,n表示导向矢量,表达式如下:式中,w0为接收信号的角频率,且w0=2πf0=2πc/λ,c表示声速;τ
mi
表示相对于参考圆形阵列阵元第m个阵元接收到第i个信号的时间延时。7.如权利要求5所述用于多旋翼无人机定位跟踪的常模信号盲估计方法,其特征在于,所述步骤(2.2)的具体过程为:所述实值波束成形空间esprit算法利用圆形阵元阵列接收数据协方差矩阵的信号子空间的旋转不变性,进而计算出空间信号源传来多旋翼无人机位置信号的方位角和俯仰角;圆形阵元阵列由多个子阵列组成,由多个直线阵列围起来,子阵列阵元数目交叉排列,都是m个,其中x(t)子阵列表示0到m-1个阵列组成的组合阵列,y(t)子阵列表示1到m个阵列组成的组合阵列;若整体的信号子空间假设为e
x
,e
x
包括两个信号子空间e1和e2,两个子空间之间存在一个非奇异矩阵的平移关系,称为旋转算子,表达式为:e1ψ=e2式中,ψ表示为ψ=t-1
φt,t为非奇异矩阵,φ是ψ的特征值对角矩阵;e1表示x(t)子阵列获取的信号子空间;e2表示y(t)子阵列获取的信号子空间;所述旋转算子简化表达式为:e1=ate2=aφt推导出ψ和φ的关系式:φ=tψt-1
通过对ψ进行特征值分解得到φ,再利用φ估计空间内多旋翼无人机位置信号的方位角与俯仰角。8.一种实施如权利要求1-7任意一项所述用于多旋翼无人机定位跟踪的常模信号盲估计方法的用于多旋翼无人机定位跟踪的常模信号盲估计系统,其特征在于,所述用于多旋翼无人机定位跟踪的常模信号盲估计系统包括:2d-music模块,用于对多旋翼无人机常模信号的doa进行盲估计,利用二维角度来盲估计doa的角度信息;曲线拟合模块,用于推导出了多旋翼无人机常模信号入射最小临界角与无人机信号源个数之间的关系式;检测模块,用于搭建了基于实值波束成形空间esprit算法结合无迹卡尔曼滤波算法得多旋翼无人机定位跟踪盲估计装置平台,设计双系统的圆形阵列模型,并结合odas开放嵌入式测试系统,实时对多旋翼无人机的方向角和俯仰角进行检测。9.一种实施如权利要求8所述的常模信号盲估计系统的用于多旋翼无人机定位跟踪的常模信号盲估计处理终端,所述处理终端的具体的处理过程为:使用labview虚拟仪器建立数学模型和常模信号盲估计的界面设计,在三维空间doa盲估计系统软件设计上,所述虚拟仪器在功能齐全的硬件基础上,结合软件系统完成各种开发和仿真模拟。10.如权利要求9所述用于多旋翼无人机定位跟踪的常模信号盲估计处理终端,其特征在于,所述处理终端包括:系统登录界面,在登录界面里,输入正确的用户名和登录密码后,点击登录按钮,进入三维空间doa盲估计系统的主要功能页面;输入已经设定好的用户名和密码;若输入错误,系统会提示“用户名和密码输入错误”,无法进入主系统;所述系统登录界面采用平铺式顺序结构,通过三帧顺序来执行编程;在第一帧写入while循环,起到循环输入用户名和密码的作用,当所输入的用户名和密码是正确的,点击登录就能第一时间向后一帧输出为“真”的信号指令,反之输出为假;相较于第二帧,第三帧起到判断输出的作用,若输出为“真”,就会打开系统功能所对应的子vi;所述前面板图中doa盲估计的输入部分为频点、信号的协方差矩阵、方位角和俯仰角的扫描精度,输出的内容为空间谱、接收信号的方位角跟俯仰角以及误差参数;所述程序框图是虚拟仪器进行编程的地方,通过采用模块化的器件进行连线编程,整体分为两部分模块,一部分为对协方差矩阵进行特征值分解的功能;另一部分则为由方位角和俯仰角决定的矢量计算,信号流通过两部分的信号处理,最终进行空间谱盲估计的计算;系统功能操作界面,包括前面板图以及程序框图,用于利用labview仿真模拟实现用于多旋翼无人机定位跟踪的常模信号doa盲估计的系统功能。
技术总结
本发明属于无人机定位与跟踪领域,公开了一种用于多旋翼无人机定位跟踪的常模信号盲估计方法及系统,利用2D-MUSIC算法盲估计多旋翼无人机常模信号DOA;通过曲线拟合方法,推导出了多旋翼无人机常模信号入射最小临界角与无人机信号源个数之间的关系式;采用实值波束成形空间ESPRIT算法结合无迹卡尔曼滤波算法和ODAS开放嵌入式测试系统,实时对多旋翼无人机的方向角和俯仰角进行检测。本发明还提供了针对多旋翼无人机的三维空间DOA盲估计的界面操作系统,极大地提升了对多旋翼无人机信号传输过程中的位置定位、信号分析处理及智能化的管理,实现了自动化地观测和操作,安全且便捷,直观显示出多旋翼无人机实时DOA三维空间仰角和方位角的数据。和方位角的数据。和方位角的数据。
技术研发人员:樊宽刚 侯浩楠 杨春荣
受保护的技术使用者:江西理工大学
技术研发日:2022.11.07
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。