1.本公开总体上涉及适用于按钮和选择器的基于磁性的无接触开关装置。
背景技术:
2.本部分提供与本公开有关的背景信息,其不一定是现有技术。
3.传统上,开关装置利用机械控制的触头,这些触头在给定次数的操作后会磨损,从而限制了开关装置的寿命。此外,这种开关装置不适合在潮湿环境中操作,因为机械控制的触头将暴露于湿气的进入并过早退化。
4.随着技术的进步,开关装置的机械控制触头已经逐渐被由磁场或电场控制的无触头固态开关所取代。在一些情况下,这种无接触固态开关利用永磁体来提供用于开关控制的磁场源。在开关装置的中到大批量生产中,利用传统的永磁体作为磁场源承受了制造上的缺点,这些缺点是由永磁体的处理和组装方面的挑战造成的,这增加了总的产品成本。
5.因此,具有易于制造的简单、低成本的无接触开关装置将是有利的。
技术实现要素:
6.本公开的一个方面涉及一种电气无接触开关。该电气无接触开关包括壳体、磁场传感器和可移动元件。可移动元件由铁磁材料制成,并且可滑动地安装在壳体中。可移动元件适于相对于壳体在静止位置和接合位置之间移动。可移动元件被朝向静止位置弹性偏压。可移动元件包括多个彼此间隔开的磁化腿部,并且至少一部分磁化腿部在壳体中被可滑动地引导。
7.磁场传感器被紧固到壳体上,并被定位成面向多个磁化腿部。磁性元件被配置成当可移动元件处于接合位置时检测由磁化腿部产生的磁场。可移动元件在接合位置比在静止位置更靠近磁场传感器。
8.此外,多个磁化腿部的腿部可以从可移动元件的一侧平行伸出。
9.此外,多个磁化腿部可以被磁化,使得多个磁化腿部中的至少一个腿部在与多个磁化腿部中的其余磁化腿部相反的方向上被磁化。
10.此外,多个磁化腿部可以包括两个侧腿部和两个侧腿部之间的中间腿部,其中中间腿部在与两个侧腿部相反的方向上被磁化。
11.此外,两个侧腿部中的每一个可以由横向向外伸出的钩状部终止。
12.此外,壳体可以包括槽,可移动元件可以在该槽中被可滑动地引导,并且侧腿部可以卡扣配合在该槽中,并且通过与属于该槽的抵接部配合的钩状部而保持在该槽中。
13.此外,该开关还可以包括至少部分地位于多个磁化腿部以及磁场传感器之间的弹性元件,其中,该弹性元件可以被配置成将可移动元件朝向静止位置弹性地偏压,并且抵消可移动元件从静止位置到接合位置的移动。
14.此外,该弹性元件可以是压缩型螺旋弹簧。
15.此外,可移动元件可以由退火的半硬铁磁金属或硬铁磁金属制成。
16.此外,退火的铁磁金属可以是钴基金属。
17.此外,可移动元件可以具有厚度为1mm至3mm的板形状。
18.此外,磁场传感器可以包括霍尔效应传感器或磁阻传感器。
19.另一方面涉及一种制造用于电气无接触开关的可移动元件和/或如上定义的其替代物的方法。该方法包括:提供由铁磁材料制成的可移动元件,该可移动元件包括多个彼此间隔开的腿部,并且通过将磁体抵靠这些腿部中的一个来磁化这些腿部。
20.此外,多个磁化腿部可以包括两个侧腿部和两个侧腿部之间的中间腿部,并且磁化这些腿部可以通过仅将磁体抵靠中间腿部来执行。
21.此外,磁体可以是永磁体,可移动元件可以由退火的半硬铁磁金属或硬铁磁金属制成。
22.从本文的描述中,进一步的应用领域将变得显而易见。发明内容中的描述和具体示例仅用于说明的目的,并不旨在限制本公开的范围。
附图说明
23.本发明的其他特征和优点将从以下对其一些实施例的详细描述中显现出来,这些描述以非限制性示例的方式给出,并参考了附图,在附图中:
24.图1是描绘电气无接触开关的第一实施例的图示。
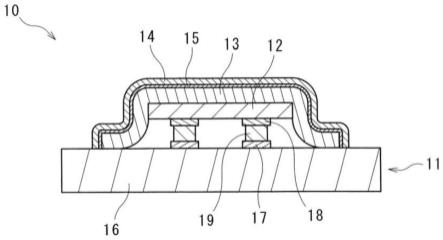
25.图2是描绘处于接合位置的电气无接触开关的第二实施例的图示。
26.图3是描绘处于静止位置的电气无接触开关的第二实施例的图示。
27.图4是描绘磁化前的可移动元件的示例性图示。
28.图5是描绘磁化期间可移动元件的示例性图示。
29.图6是描绘磁场传感器附近的磁化的可移动元件的示例性图示。
30.图7是可移动元件的示例性透视图。
31.图8是描绘用于制造电气无接触开关的可移动元件的方法的实施例的流程图。
具体实施方式
32.当结合附图阅读时,将更好地理解前面的概述以及下面对某些示例的详细描述。如本文所用,以单数形式叙述并以单词“一”或“一个”开头的元件或步骤应该被理解为不排除多个元件或步骤,除非这种排除被明确声明。此外,对“一个实施例”的引用不旨在被解释为排除也结合了所述特征的附加实施例的存在。此外,除非明确声明相反,否则“包括”或“具有”带有特定属性的一个或多个元素的实施例可以包括不具有该属性的附加元素。
33.在附图中,相同的附图标记表示相同或相似的元件,除非另有说明。在附图中,为了描述的方便和清楚,每个元件或构成该元件的特定部分的尺寸被放大、省略或示意性地示出。因此,每个部件的大小可能不完全反映实际大小。在判断出相关已知功能或构造的详细描述可能不必要地模糊本公开的要点的情况下,将省略这种解释。
34.在图1中描绘了电气无接触开关1的第一实施例。第一实施例包括壳体2、可移动元件3和磁场传感器7。可移动元件可以相对于壳体在静止位置和接合位置之间移动,如箭头12所示。可移动元件可以在壳体2内的槽11、10中滑动。可移动元件3可以具有多个磁化突起,这些突起可以形成多个彼此间隔开的磁化腿部4和6,它们之间具有间隙5。虽然在图1中
示出了多个磁化腿部中的两个腿部,但是可移动元件3可以具有三个或更多个腿部。磁化腿部4和6可以从可移动元件3的一侧平行伸出。磁场传感器7可以紧固到壳体上,并且定位成面向多个磁化腿部4和6。磁场传感器7可以联接到印刷电路板8,印刷电路板8可以附接(未示出)到壳体2。当可移动元件3处于接合位置时,磁场传感器7检测由多个磁化腿部4、6产生的磁场。可移动元件3在接合位置比在静止位置更靠近磁场传感器7。磁场传感器14可以包括霍尔效应传感器或磁阻传感器。磁场传感器14可以是霍尔效应开关。可移动元件经由弹性元件9被朝向静止位置弹性偏压,该弹性元件9可以至少部分地位于多个磁化腿部4和6以及磁场传感器7之间。弹性元件9可以抵消可移动元件从静止位置到接合位置的移动。弹性元件9可以由弹性体制成,并具有各种形状。
35.图2和3描绘了电气无接触开关13、25的第二实施例。图2描绘了处于接合位置的电气无接触开关13的第二实施例,而图3描绘了处于静止位置的电气无接触开关13的第二实施例。第二实施例包括壳体24、可移动元件18和磁场传感器14。可移动元件可以相对于壳体在静止位置和接合位置之间移动,如箭头30所示。可移动元件18可以具有多个磁化突起,这些磁化突起可以形成多个磁化腿部16、19和21,这些磁化腿部16、19和21通过在它们之间具有间隙而彼此间隔开。如图2和3所示的可移动元件18具有三个腿部,然而,可移动元件可以具有除了三之外的其它数量的腿部。磁化腿部16、19和21可以从可移动元件18的一侧平行伸出。可移动元件18可以具有两个侧腿部16、21和位于两个侧腿部之间的中间腿部19。如图3所示,两个侧腿部16、21中的每一个可以由横向向外伸出的钩状部29和26终止。壳体24可以具有槽28、27,可移动元件18在槽28、27中被可滑动地引导。侧腿部16和21可以卡扣配合在槽中,并且通过与属于槽的抵接部20、17配合的钩状部26、29而被保持在槽中。
36.磁场传感器14可以紧固到壳体上,并且定位成面向多个磁化腿部16、19和21。磁场传感器14可以联接到印刷电路板15,印刷电路板15可以附接(未示出)到壳体24。当可移动元件18处于接合位置23时,磁场传感器14可以检测由多个磁化腿部16、19和21产生的磁场。可移动元件18在接合位置比在静止位置更靠近磁场传感器14,接合位置被描绘为间隙23。磁场传感器14可以包括霍尔效应传感器或磁阻传感器。磁场传感器14可以是霍尔效应开关。
37.当可移动元件18处于接合位置23时,可以有一个以上的磁传感器固定到壳体上,以在感测由多个磁化腿部16、19和21产生的磁场时提供冗余。例如,附加的磁传感器31可以联接到同一印刷电路板15。印刷电路板15可以是单面或双面印刷电路板15,并且磁传感器15可以焊接到印刷电路板15的一侧。与第一磁传感器14相比,附加的磁传感器32可以有利地联接到印刷电路板15的相对侧。两个磁传感器14、32可以放置在基本相同的位置,仅印刷电路板在它们之间,使得当可移动元件18移动到接合位置23时,它们都检测由多个磁化腿部16、19和21产生的磁场。两个磁传感器可以由相同的传感器组成,或者它们可以由不同类型的传感器组成,例如霍尔效应传感器和磁阻传感器。
38.印刷电路板15可以承载其他电子部件13,例如没有限制处理和/或保护的电路、通信和/或连接电路等。
39.可移动元件18可以经由弹性元件22朝向静止位置被弹性偏压,弹性元件22可以至少部分地位于多个磁化腿部16、19和21与磁场传感器7之间。弹性元件22可以抵消可移动元件从静止位置到接合位置的移动。如图2和3所示的弹性元件22可以是压缩型螺旋弹簧。然
而,也可以使用其他类型的弹性元件。这种弹性元件的非限制性示例可以是具有各种形状的弹性体、片簧、涡形弹簧、拉伸弹簧等。
40.可移动元件18可以由铁磁材料制成。铁磁材料可以是金属。该金属可以是半硬或硬铁磁金属。该金属可以由钴基金属制成。可移动元件18最初可以不被磁化。半硬或硬铁磁金属可以选自矫顽力hc例如在25至700a/m之间的材料。铁磁材料可以是金属片或金属板的形状。铁磁材料可以是延展性的,并且适于通过从金属片或金属板冲压或冲孔来制造可移动元件。这种类型的生产的一个好处是可移动元件的低成本生产。这种生产的另一个好处是,可移动元件由未磁化的金属片冲孔而成,这简化了其运输和处理。一般来说,延展性涉及一种材料特性,其表现出经受和/或承受塑性变形的能力。
41.当由金属片或金属板制成时,可移动元件18可以形成厚度在1mm至3mm之间的板形状,如图7所示,图7示出了这种板形状63的可移动元件62的示例性透视图。冲压或冲孔方法能够产生特征,例如终止可移动元件62的腿部的突起61。可移动元件也可以通过替代方法制成,例如经由诸如金属注射成型由粉末压制金属制成,或者由涉及不同类型的金属添加或金属减去制造的其他方法制成。
42.一旦可移动元件18成形,就可以进行热处理。热处理可以是退火。退火的一个好处是,它使可移动元件18的铁磁材料比退火前更硬,并且在退火后的状态下,可移动元件18的铁磁材料可以表现出明确的、鲁棒的和可重复的磁性。
43.图4、5和8描绘了如两个实施例中任一个所述的可移动元件18的示例性磁化过程。图4描绘了最初处于未磁化状态的可移动元件18和可以由永磁体37形成的磁场源36。替代地,磁场源可以是电磁体(未示出)。永磁体37可以在其第一端38具有磁南极,在其与第一端38相对的第二端具有磁北极。
44.永磁体37的第一端38可以被设置成面向可移动元件18的中间腿部19的一端39。如图5所示,永磁体的第一端38可以沿图4中箭头40的方向朝向可移动元件18的中间腿部45的端部39移动,直到永磁体37的第一端38抵靠可移动元件的中间腿部45的端部39。因此,可移动元件48可以被永磁体37产生的永磁体磁场36磁化。这种磁化操作的一个好处是它的简单性和转变为自动化工业过程的能力。
45.腿部的磁化可以通过仅将磁体抵靠67中间腿部来执行。于是,磁力线可以穿过可移动元件48的侧腿部46、47,并通过可移动元件48的中间腿部45闭合磁路。因此,磁化的可移动元件48的中间腿部45可以在与磁化的可移动元件48的侧腿部46、47相反的方向上被磁化。如果永磁体的第一端38具有如图4和5所示的南磁极,那么磁化的可移动元件48的中间腿部45可以被磁化为北磁极,而侧腿部具有南磁极。
46.图6示出了当可移动元件48是磁化的时可以产生的磁场线,如上所述,通过将永磁体37仅抵靠67可移动元件48的中间腿部45。磁场线51然后可以从磁化的可移动元件48的中间腿部45流向侧腿部46和47。流经可移动元件48的中间腿部45和每个侧腿部46、47之间的间隙52、53的磁力线可以比通过磁场传感器14在中间腿部45和每个侧腿46、47之间闭合的磁场线51更密集。
47.可移动元件48的这种扁平且集中的形状的一个好处是,它使得能够设计出尺寸紧凑但鲁棒的电气无接触开关。
48.应该理解的是,上面的描述旨在是说明性的,而不是限制性的。例如,上述实施例
(和/或其方面)可以彼此组合使用。此外,在不脱离本公开各种实施例的范围的情况下,可以进行许多修改以使特定的情况或材料适应本公开的各种实施例的教导。虽然本文描述的材料的尺寸和类型旨在限定本公开的各种实施例的参数,但是这些实施例决不是限制性的,而是示例性的实施例。在阅读以上描述后,许多其他实施例对于本领域技术人员来说将是显而易见的。因此,本公开的各种实施例的范围应当参照所附权利要求以及这些权利要求的等同物的全部范围来确定。在所附权利要求中,术语“包括(including)”和“其中(in which)”被用作相应术语“包括(comprising)”和“其中(wherein)”的简明英语等价物。此外,术语“第一”、“第二”和“第三”等仅用作标签,并不旨在对它们的对象强加数字要求。
49.该书面描述使用示例来公开本公开的各种实施例,包括最佳模式,并且还使得本领域的任何技术人员能够实践本公开的各种实施例,包括制造和使用任何设备或系统以及执行任何并入的方法。本公开的各种实施例的可专利范围由权利要求限定,并且可以包括本领域技术人员想到的其他例子。如果这些其他例子具有与权利要求的字面语言没有不同的结构元素,或者如果这些其他例子包括与权利要求的字面语言没有实质性差异的等同结构元素,则这些其他例子旨在处于权利要求的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。