使用平面开关元件的改进的同步桥式整流器
1.相关申请
2.本技术要求2021年8月17日提交的美国临时申请no.63/234,158的优先权,其全部内容通过引用并入本文。
技术领域
3.本发明涉及同步桥式整流器领域,更特别地,本发明涉及同步桥式整流器、操作同步桥式整流器的方法及其部件。
背景技术:
4.桥式整流器将交流(ac)信号转换为直流(dc)信号。这个过程也被称为“整流”。桥式整流器通常用于离线式电源,其从正弦交流输入电源接收电力并提供可用于为负载(例如电子装置)供电的稳压直流输出。虽然此类电源通常对整流后的直流信号执行后续处理和转换,但桥式整流器执行将交流信号转换为直流信号的基本功能。
5.图1示出了现有技术的桥式整流器电路。如图1所示,第一二极管d1的阴极耦合到第二二极管d2的阴极。第二二极管d2的阳极耦合到第三二极管d3的阴极。第三二极管d3的阳极耦合到第四二极管d4的阳极。第四二极管d4的阴极耦合到第一二极管d1的阳极。第一二极管d1的阳极和第四二极管d4的阴极之间的节点提供第一交流电源输入端,而第二二极管d2的阳极和第三二极管d3的阴极之间的节点提供第二交流电源输入端。第一二极管d1的阴极和第二二极管d2的阴极之间的节点提供第一直流信号输出端,而第三二极管d3的阳极和第四二极管d4的阳极之间的节点提供第二直流信号输出端。在输入端上施加交流输入信号v
ac
,以在输出端上产生整流后的直流输出信号v
dc
。
6.图2示出了交流正弦波输入信号v
ac
和整流后的直流输出信号v
dc
。如图2所示,交流输入信号v
ac
跨越零伏特电平以上和以下。产生的脉动直流输出信号v
dc
保持在零伏特电平以上。图1和图2中所示的整流器是全波整流器,这意味着交流输入信号的正和负部分(在零伏特电平以上和以下)被转换为输出。其他类型的整流器包括半波整流器,其中交流输入的正半部分或负半部分被传递到输出,而另一半被阻塞。
7.在整流器中使用二极管使得设计相对简单,但是,跨二极管的电压降(大约0.7伏特)会产生热量并降低效率。因此,需要一种改进的桥式整流器。
技术实现要素:
8.本发明提供了一种使用平面开关元件的同步桥式整流器。在一个实施例中,同步桥式整流器包括单片裸片,该单片裸片包括多个平面开关元件,每个平面开关元件具有控制端和两个受控端。桥式整流器还包括机械地附接到单片裸片的多个控制器集成电路,其中控制器集成电路被配置为感测跨平面开关元件的受控端的电压并在平面开关元件的控制端处产生驱动信号,以控制平面开关元件的打开和关闭,从而能够对交流输入信号进行整流,以形成整流后的直流输出信号。
附图说明
9.本发明是关于其特定示例性实施例进行描述的,并因此参考附图,其中:
10.图1示出了现有技术的二极管桥式整流器电路;
11.图2示出了交流正弦波电压信号和全波整流后的正弦波电压信号;
12.图3示出了根据本发明的实施例的同步桥式整流器;
13.图4示出了根据本发明的实施例的同步桥式整流器的开关单元的控制电路;
14.图5a-图5b示出了根据本发明的实施例的驱动器电路;
15.图6示出了显示根据本发明的实施例的驱动器电路的操作的时序图;
16.图7示出了根据本发明的实施例的开关功率转换器;
17.图8示出了根据本发明的实施例的用于开关单元的电源;
18.图9示出了根据本发明的实施例的四晶体管单片集成电路裸片;
19.图10示出了根据本发明的实施例的用于同步桥式整流器的集成电路组件;
20.图11示出了根据本发明的实施例的用于同步桥式整流器的集成电路组件的示例性接合线连接;
21.图12示出了根据本发明的替代实施例的用于同步桥式整流器的集成电路组件;以及
22.图13a-图13d示出了根据本发明的实施例的用于同步桥式整流器的集成电路组件的顶视图、侧视图、底视图和端视图。
具体实施方式
23.根据本发明的实施例,提供了一种同步桥式整流器,其中同步开关元件包括平面晶体管。例如,开关元件可以包括高电子迁移率晶体管(hemt),例如氮化镓(gan)晶体管。这种开关元件是“平面的”,因为它们往往比等效容量的“垂直的”结构(例如金属-氧化物-硅场效应晶体管(mosfet))每个器件占据更大的面积。在优选实施例中,开关元件包括gan晶体管;因此,在本文描述的实施例中,开关元件被称为gan晶体管。然而,应当理解,所描述的gan晶体管可以用任何类型的hemt器件或任何其他类型的平面器件代替,包括但不限于由碳化硅、双极和锗半导体材料构成的那些。
24.每个开关元件,例如gan晶体管,由相应的专用控制器电路控制,该控制器电路感测跨gan晶体管的漏极和源极的电压,并且响应于感测到的电压,控制gan晶体管的栅极以在适当的时间开启和关断gan晶体管,以便对交流(ac)源的交流输入信号进行整流,以形成直流dc输出信号。
25.每个控制器电路优选地实施为集成电路(ic),该集成电路配备有用于从交流输入信号为其自身供电的电源。耦合到每个控制器电路的电容器用作能量储存器,以在控制器电路的电源无法从交流输入信号获得电力时为控制器电路提供电力。
26.每个控制器电路优选地具有恰好四个端子,包括被配置为控制相应的gan晶体管的栅极的栅极端,被配置为耦合到相应的gan晶体管的漏极的漏极端,被配置为耦合到相应的gan晶体管的源极的源极端以及电源端。控制器被配置为感测跨相应的gan晶体管的漏极和源极的电压,用于控制gan晶体管的开关。控制器还被配置为从跨漏极端和源极端的交流输入电压获得用于为控制器电路供电的电力。电源端耦合到电容器,用于对电容器充电以
及从电容器接收能量。当控制器电路的电源无法使用交流电源时,电容器提供能量存储,用于为控制器电路供电。
27.根据一个实施例,每个控制器电路可以将代表gan晶体管的漏源电压的感测信号与第一参考电压电平进行比较,用于关断gan晶体管。该比较可以由控制器的第一比较器执行。每个控制器还可以将代表gan晶体管的漏源电压的感测信号与第二参考电压电平进行比较,用于开启gan晶体管。该比较可以由控制器的第二比较器执行。
28.每个控制器电路优选地包括用于控制相应的gan晶体管开关的栅极端的栅极驱动器。栅极驱动器被配置为向相应的gan晶体管提供适当的驱动信号。例如,由栅极驱动器产生的栅极驱动信号被限制在大约5.5伏特直流的最大电平。控制器电路可以包括用于实现控制器功能的mosfet。因此,用于控制器电路的电源电压电平可以是例如15至20伏特直流。如本文所述,可以提供额外的控制器部件。
29.控制器电路和gan晶体管(以及可能相应的电容器)的组合在本文中被称为“开关单元”。这种开关单元本质上用作“理想二极管”。当组合后,控制器电路、其相应的gan晶体管和电容器优选地恰好具有两个端子,即漏极端和源极端,使得每个开关单元也恰好具有相同的两个端子。因此,本发明的实施例还提供了一种二极管替代品,其可以用于桥式整流器以及其他二极管应用中。这种开关单元可以并联使用,以增加它们的电流处理能力。例如,可以并联使用两个或更多个桥式整流器来为大容量电源提供整流后的电流。
30.在全波桥式整流器的实施例中,提供了四个控制器电路,每个控制器电路具有相应的gan晶体管和电容器。这四个开关单元中的每一个都可以与其他开关单元相同,尽管以全桥配置连接在一起。每个开关单元优选地独立于其他开关单元操作,无需集中控制;然而,每个开关单元的操作与交流输入信号同步,因此所有开关单元的操作同步以执行交流输入信号的整流。
31.由于每个控制器都设置有相应的电源,因此整流器缺少集中或外部电源。整流器也缺少公共接地节点。相反,每个开关单元都具有自己的电压参考,其对应于gan晶体管的源极端。因此,不需要高侧驱动器(高侧驱动器是一种能够驱动晶体管的栅极的控制电路,其源极端不参考与控制电路相同的地)。
32.在一个实施例中,提供了一种四晶体管单片集成电路裸片。这种单片集成电路裸片可以包括四个gan晶体管开关。因此,这样的单片集成电路裸片可以用于全桥整流器。在另一个实施例中,提供了一种桥式整流器集成电路(ic)组件或“封装”。这样的ic组件可以包括四个控制器电路,每个控制器电路被配置为控制相应的gan晶体管。每个控制器电路可以实施为相应的集成电路。例如,控制器集成电路可以使用并包括mosfet。四个这样的控制器集成电路可以物理地安装(即机械地附接)到gan晶体管单片集成电路裸片(例如,通过胶合、环氧树脂胶合或其他方式结合)。每个这样的控制器集成电路还可以电连接到gan晶体管单片集成电路裸片的相应的gan晶体管开关的栅极、漏极和源极端。组件或封装可以例如恰好具有八个端子或引脚。这八个端子可以包括桥式整流器的四个端子(即两个交流输入端和两个整流后的直流输出端)和四个电源端(一个电源端用于四个储能电容器中的一个)。四个储能电容器可以在ic封装的内部或外部,并跨接在每个控制器电路的电源和源极端之间。
33.在用于全桥整流器的ic组件或封装的另一实施例中,四个控制器电路中的两个共
享公共参考节点。例如,公共参考节点可以对应于整流后的直流输出公共节点。共享公共参考节点的控制器电路也可以共享公共电源节点和外部电容器。共享公共参考节点的控制器电路也可以组合成单个控制器集成电路。在这种情况下,ic组件可以恰好具有七个端子或引脚。这七个端子可以包括桥式整流器的四个端子(即两个交流输入端和两个整流后的直流输出端)和三个电源端(一个电源端用于三个储能电容器中的一个)。
34.储能电容器可以在桥式整流器ic组件的外部。在另一个实施例中,储能电容器可以在桥式整流器ic组件的内部。在内部电容器的情况下,桥式整流器ic组件可以恰好用四个端子(即两个交流输入端和两个整流后的直流输出端)来实施。
35.图3示出了根据本发明的实施例的同步桥式整流器100。图3示出了具有四个同步开关单元102、104、106和108的全波桥式整流器布置。第一开关单元102包括控制器u1、晶体管g1和电容器c1。晶体管g1的漏极端耦合到控制器u1的漏极端。晶体管g1的源极端耦合到控制器u1的源极端。晶体管g1的栅极端耦合到控制器u1的栅极端。控制器u1的电源端耦合到电容器c1的第一端。电容器c1的第二端耦合到控制器u1的源极端和晶体管g1的源极端。开关单元102具有与晶体管g1和控制器u1的漏极端和源极端相对应的漏极端和源极端。
36.第二开关单元104包括控制器u2、晶体管g2和电容器c2。晶体管g2的漏极端耦合到控制器u2的漏极端。晶体管g2的源极端耦合到控制器u2的源极端。晶体管g2的栅极端耦合到控制器u2的栅极端。控制器u2的电源端耦合到电容器c2的第一端。电容器c2的第二端耦合到控制器u2的源极端和晶体管g2的源极端。开关单元104具有与晶体管g2和控制器u2的漏极端和源极端相对应的漏极端和源极端。
37.第三开关单元106包括控制器u3、晶体管g3和电容器c3。晶体管g3的漏极端耦合到控制器u3的漏极端。晶体管g3的源极端耦合到控制器u3的源极端。晶体管g3的栅极端耦合到控制器u3的栅极端。控制器u3的电源端耦合到电容器c3的第一端。电容器c3的第二端耦合到控制器u3的源极端和晶体管g3的源极端。开关单元106具有与晶体管g3和控制器u3的漏极端和源极端相对应的漏极端和源极端。
38.第四开关单元108包括控制器u4、晶体管g4和电容器c4。晶体管g4的漏极端耦合到控制器u4的漏极端。晶体管g4的源极端耦合到控制器u4的源极端。晶体管g4的栅极端耦合到控制器u4的栅极端。控制器u4的电源端耦合到电容器c4的第一端。电容器c4的第二端耦合到控制器u4的源极端和晶体管g4的源极端。开关单元108具有与晶体管g4和控制器u4的漏极端和源极端相对应的漏极端和源极端。晶体管g1、g2、g3和g4的栅极端可以被称为控制端,而晶体管g1、g2、g3和g4的漏极端和源极端可以被称为受控端。
39.开关单元102的源极端在节点n1处耦合到开关单元108的漏极端。节点n1提供第一交流电源输入端。开关单元102的漏极端在节点n2处耦合到开关单元104的漏极端。节点n2提供第一直流输出输出端。开关单元104的源极端在节点n3处耦合到开关单元106的漏极端。节点n3提供第二交流电源输入端。开关单元106的源极端在节点n4处耦合到开关单元108的源极端。节点n4提供第二直流输出输出端。当跨整流器100的输入端(即跨节点n1和n3)施加交流输入信号v
ac
时,跨整流器100的输出端(即跨节点n2和n4)形成整流后的直流输出信号v
dc
。
40.图4示出了根据本发明的实施例的用于同步桥式整流器的控制电路200。控制电路200可以用来代替图3所示的控制电路u
1-u4中的每一个。如图4所示,控制电路200具有vcc电
源202、感测电阻器r
sense
、二极管d5、第一比较器204、第二比较器206、单稳态触发器(one-shot)208、触发器210、驱动器212以及参考电压vref1和vref2。
41.控制电路200的漏极端耦合到电阻器r
sense
的第一端和vcc电源202的第一端。电阻器r
sense
的第二端耦合到二极管d5的阳极以及比较器204和206中的每一个的第一输入端。在电阻器r
sense
和二极管d5之间的节点处产生电压感测信号v
sense
。vcc电源202的第二端和二极管d5的阴极耦合到控制电路200的电源端。可以在控制电路200外部的电容器(该电容器未在图4中显示,而是在图3中显示为c1、c2、c3或c4)耦合在控制电路200的电源和源极端之间。
42.控制器电路200被配置为在控制器电路200的漏极端处接收来自交流电源v
ac
的电流。该电流通过电阻器r
sense
和二极管d5以对外部电容器(c1、c2、c3或c4)充电。此外,来自漏极端的电流在vcc电源202的第一端处被接收并由vcc电源202用于在vcc电源的第二端处产生稳定输出电压vcc,其调节外部电容器上的电压电平并且产生用于控制器电路200的部件的电力。
43.更特别地,vcc电源电压被耦合以向第一比较器204、第二比较器206、单稳态触发器208、触发器210和驱动器212的vcc电源端提供电力。参考电压vrefl和vref2可以来源于电源端的电压电平。第一比较器204、第二比较器206、单稳态触发器208、触发器210、驱动器212以及参考电压vref1和vref2中的每一个的接地端耦合到控制电路200的源极端。源极端用作控制电路200的公共(接地)节点。
44.电压感测信号v
sense
的电平代表相应晶体管(g1、g2、g3或g4)的漏源电压(v
ds
)。晶体管的漏源电压代表交流电源信号v
ac
以及通过晶体管的漏源电流水平。更特别地,信号v
sense
代表v
ac
的瞬时电平,并因此代表在每个瞬间交流电源的重复周期中的点。因为晶体管具有漏源电阻(r
ds
),所以信号v
sense
也代表通过晶体管的电流水平。信号v
sense
被施加到比较器204的第一输入端(例如,非反相输入)和比较器206的第一输入端(例如,反相输入)。比较器204的第二输入端接收第一参考电压vref1,而比较器206的第二输入端接收第二参考电压vref2。第一参考电压vref1例如可以是-5mv,而第二参考电压vref2例如可以是-100mv。因此,第一参考电压vref1高于第二参考电压vref2。
45.图5a-图5b示出了根据本发明的实施例的驱动器电路212。参考图5a,vcc电源电压(图4)耦合到mosfet m1的源极端。mosfet m1的漏极端耦合到mosfet m2的漏极端。mosfet m2的源极端耦合到mosfet m3的漏极端和控制电路的栅极输出端(即,特定控制电路u1、u2、u3或u4的栅极输出)。mosfet m2的栅极端和mosfet m3的源极端耦合到接地节点(即特定控制电路u1、u2、u3或u4的接地节点)。mosfet m1的栅极端和mosfet m3的栅极端耦合到触发器210的(q-bar)输出(图4)。mosfet m1和m3优选地为增强型mosfet,m1为pmos(即p型),m3为nmos(即n型mos),而mosfet m2优选地为耗尽型nmos。图5b示出了驱动器的替代实施例212'。图5b的驱动器212'与图5a的驱动器212的不同之处在于图5b的mosfet m2是增强型nmos并且电压参考214耦合在接地节点和m2的栅极之间。
46.如本文所解释的,vcc的电平相对于接地节点可以是大约12-15伏特直流。触发器210的输出是可以在0.0伏特到12-15伏特范围内的逻辑信号,其中0.0伏特表示逻辑“0”而12-15伏特表示逻辑“1”。图5a的驱动器电路212和图5b的驱动器电路212'用于反转逻辑输入信号的极性并将栅极输出端处的输出信号的电压范围限制在0.0到5.5伏特的范围
内。图4的驱动器电路212可以由图5a的驱动器212、图5b的驱动器212'或一些其他的驱动器电路实现。
47.图6示出了显示根据本发明的实施例的驱动器电路212和212'(图5a和图5b)的操作的时序图。驱动器电路212或212'的输入如图6的下部所示,其范围为0.0至15.0伏特。驱动器电路212或212'的栅极输出如图6的上部所示,其范围为0.0至5.5伏特。在时间t0,输入处于0.0伏特电平(逻辑“0”),栅极输入处于5.5伏特电平(逻辑“1”)。在时间t1,输入转换到15.0伏特电平(逻辑“1”),栅极输入转换到0.0伏特电平(逻辑“0”)。在时间t2,输入转换到0.0伏特电平(逻辑“0”),栅极输入转换到5.5伏特电平(逻辑“1”)。在时间t3,输入转换到15.0伏特电平(逻辑“1”),栅极输入转换到0.0伏特电平(逻辑“0”)。因此,如图6所示,驱动器电路212或212'用于反转输入信号的极性,使得栅极输出与的逻辑电平相反。此外,虽然信号的电压电平范围为0.0到15.0伏特,但在栅极输出端处的输出信号的电压范围被限制在0.0到5.5伏特的范围内。
48.同步整流由图3-图4和图5a-图5b的桥式整流器执行如下。当v
ac
的电平高于零时,处于u1位置(图3)的控制器200开启晶体管g1,使其导通(on)。处于u3位置的控制器200也开启晶体管g3,使其导通(on)。同时,处于u2和u4位置的控制器200关断晶体管g2和g4,使得它们不导通(off)。这会导致电压v
ac
在不反转其极性的情况下传递到输出v
dc
。
49.相反地,当v
ac
的电平低于零时,处于u1位置(图3)的控制器200关断晶体管g1,使其不导通(off)。处于u3位置的控制器200也关断晶体管g3,使其不导通(off)。同时,处于u2和u4位置的控制器200开启晶体管g2和g4,使得它们导通(on)。这会导致电压v
ac
以其反转的极性传递到输出v
dc
。对于输入信号v
ac
的每个周期重复该循环,从而形成整流后的信号v
dc
。
50.以上是根据以下同步开关周期来完成的。当v
ac
的电平高于零时,晶体管g1和g3开启(电流从源极流向漏极),晶体管g2和g4关断。在这些条件下,跨晶体管g1和g3的漏源电压为负,控制器u1和u3的v
sense
电平也为负。此外,跨晶体管g2和g4的漏源电压为正,控制器u2和u4的v
sense
电平也为正。
51.然后,随着v
ac
的电平下降使其接近零伏特电平,跨晶体管g1和g3的漏源电压开始从负转变为正(v
ds
在上升)。这导致控制器u1和u3的v
sense
电平上升。一旦控制器u1和u3中的每一个的v
sense
电平上升到高于vref1,这将触发u1和u3的比较器204,比较器204然后复位触发器210并通过驱动器212或212'关断晶体管g1和g3。
52.同时,随着v
ac
的电平下降使其接近零伏特电平,跨晶体管g2和g4的漏源电压开始从正转变为负(v
ds
在下降)。这导致控制器u2和u4中的每一个的v
sense
电平下降。一旦v
sense
电平下降到低于vref2,u2和u4的比较器206就会触发单稳态触发器208以设置触发器210,触发器210通过驱动器212或212'开启晶体管g2和g4。
53.单稳态触发器208中的每一个用于产生足以设置触发器210的脉冲,即使比较器206的输出保持逻辑高电压,单稳态触发器208的输出随后也将转变为逻辑低电压。这防止晶体管在交流电源v
ac
的每个周期内多次开启。
54.当v
ac
的电平保持低于零时,晶体管g2和g4导通(电流从源极流向漏极),晶体管g1和g3不导通。在这些条件下,跨晶体管g2和g4的漏源电压为负,控制器u2和u4的v
sense
电平也为
负。此外,跨晶体管g1和g3的漏源电压为正,控制器u1和u3的v
sense
电平也为正。
55.然后,随着v
ac
的电平上升使其接近零伏特电平,跨晶体管g2和g4的漏源电压开始从负转变为正(v
ds
在上升)。这导致控制器u2和u4的v
sense
电平上升。一旦控制器u2和u4中的每一个的v
sense
电平上升到高于vref1,这将触发u2和u4的比较器204,比较器204然后复位触发器210并通过驱动器212或212'关断晶体管g2和g4。
56.同时,随着v
ac
的电平上升使其接近零伏特电平,跨晶体管g1和g3的漏源电压开始从正转变为负(v
ds
在下降)。这导致控制器u1和u3中的每一个的v
sense
电平下降。一旦v
sense
电平下降到低于vref2,u1和u3的比较器206就会触发单稳态触发器208以设置触发器210,触发器210通过驱动器212或212'开启晶体管g1和g3。
57.上述同步开关周期针对输入电压v
ac
的每个周期重复。
58.因为比较器204和206在不同的v
sense
电平下被激活以开启和关断晶体管g1、g2、g3和g4,这防止了任何相邻的晶体管(例如,g1和g2)同时导通,同时导通可能会导致输入v
ac
或输出v
dc
击穿或短路。尽管控制器u1、u2、u3和u4都是独立操作的。
59.如本文所解释的,每个控制器电路200优选地配备有电源202,用于从交流电源为其自身供电。耦合到每个控制器电路的电容器(电容器c1、c2、c3和c4)用作控制器电路200的能量储存器。当晶体管g1、g2、g3和g4中的相应的一个的漏源电压为正时,该晶体管被关断,并且电源202对电容器(c1、c2、c3和c4)中的相应的一个充电。通过感测电阻器r
sense
的电流也可以对电容器(c1、c2、c3和c4)中的相应的一个充电。用于对电容器c1、c2、c3和c4充电的电流是从输入交流电源v
ac
获得的。当晶体管g1、g2、g3和g4中的相应的一个的漏源电压为负时,该晶体管被开启。在这种情况下,交流电源无法对电容器(c1、c2、c3和c4)中的相应的一个充电。这是因为v
ac
与电容器上的电压极性相反。同样在这种情况下,电容器上的电荷用于为控制器200供电,直到v
ac
改变极性并再次变得可用于对电容器充电。因此,耦合到每个控制器电路200的电容器用作能量储存器,以在控制器电路的电源无法从ac输入信号获得电力时向控制器电路200提供电力。因为控制器200仅使用少量能量并且电容器需要用作储存器的持续时间很短(例如,对于50hz交流电源来说,8-10毫秒),所以电容器可以很小(例如,在10-20nf的数量级)。vcc的电平优选地保持在大约15和20伏特直流之间,这可以根据储存器电容器大小和每个v
ac
周期期间的放电速率而变化。
60.图7示出了根据本发明的实施例的开关功率转换器300。如图7所示,开关功率转换器300被配置为从交流电源v
ac
接收电力。转换器300的第一输入端耦合到保险丝f1的第一端。保险丝f1的第二端耦合到电磁干扰(emi)滤波器302的第一输入端。转换器300的第二输入端耦合到emi滤波器302的第二输入端。emi滤波器302的第一输出端耦合到同步整流器100的第一交流输入端。emi滤波器302的第二输出端耦合到同步整流器100的第二交流输入端。
61.同步整流器100的第一直流输出端耦合到电感器l1的第一端以及电容器c
in
的第一端。电感器l1的第二端耦合到二极管d6的阳极和晶体管q1的漏极端。二极管d6的阴极耦合到电容器c
out
的第一端和转换器300的输出端。同步整流器100的第二直流输出端、电容器c
in
的第二端、电容器c
out
的第二端以及晶体管q1的源极端耦合到接地节点。转换器300被配置为通过使用频率调制(fm)或脉宽调制(pwm)开启和关断晶体管q1来向负载提供稳压直流输出电压v
out
。
62.虽然图7中显示了升压转换器,但本发明可用于需要桥式整流器的任何类型的功率转换器或电源,例如降压转换器、降压-升压转换器、谐振转换器、开关电源的功率因数校正级等。此外,虽然图3和图7中示出了全桥整流器,但显然本发明的开关单元可以用于其他类型的整流器,例如半桥整流器。本发明的开关单元也可用于在其他情况下替代二极管或其他类型的整流器。
63.如本文所解释的,控制器u1、u2、u3和u4中的每一个的v
sense
电平代表v
ac
的瞬时电平,并且还代表通过相应的晶体管g1、g2、g3和g4的电流水平。这是因为每个晶体管都具有影响漏源电压电平(v
ds
)的漏源电阻(r
ds
)。当用于电源(例如,如图7所示的电源)时,负载的功率需求会随时间而变化。响应于这种变化的负载需求,通过晶体管g1、g2、g3和g4的电流水平也可以变化。在负载轻微或暂时停止汲取电力的一些情况下,晶体管g1、g2、g3和g4中的电流水平可以足够低,使得v
sense
电平不会触发比较器206以开启晶体管g1、g2、g3和g4。在这种情况下,桥式整流器100将晶体管g1、g2、g3和g4保持在不导通状态,从而节省能量,直到电流需求上升到足以使晶体管再次恢复同步整流。
64.图8示出了根据本发明的实施例的用于开关单元的电源。更特别地,图8示出了根据本发明的实施例的用于开关单元102、104、106和108的控制器200的电源202。如图8所示,耗尽型mosfet m5,例如800伏特超高压(uhv)nmosfet,其漏极端耦合到控制器200的漏极端。m5的源极端和栅极端彼此耦合,并耦合到二极管d7的阳极。二极管d7的阴极耦合到控制器200的电源端。m5的主体端(body terminal)耦合到控制器的源极端。当晶体管g1、g2、g3和g4中的相应的一个的漏源电压为正时,相应的控制器200的电源202处于工作状态;在这些条件下,电源202向控制器200的部件供电并对外部电容器c1、c2、c3和c4中的相应的一个充电。当晶体管g1、g2、g3和g4中的相应的一个的漏源电压为负时,电源202不工作,控制器200替代地从外部电容器c1、c2、c3和c4中的相应的一个汲取电力。电阻器r
sense
也可以实施为耗尽型mosfet。电阻器r
sense
和电源202可以组合并实施为单个部件。
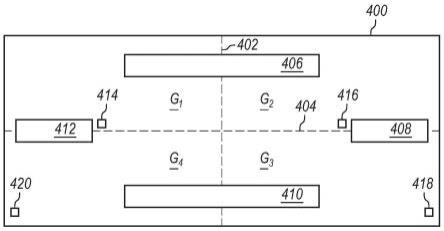
65.图9示出了根据本发明的实施例的四晶体管单片集成电路裸片(die)400。如图9所示,裸片包括四个晶体管g1、g2、g3和g4。晶体管可以包括高电子迁移率晶体管(hemt),例如沉积在单个基板上的氮化镓(gan)晶体管。这种开关元件优选地是“平面的”,因为它们往往比等效容量的“垂直的”结构(例如金属-氧化物-硅场效应晶体管(mosfet))每个器件占据更大的面积。裸片的总尺寸可以是例如大约7593微米(μm)乘2311微米(μm)。裸片400被虚线所示的隔离屏障402、404分成四个象限,每个象限用于晶体管g1、g2、g3和g4中的一个。隔离屏障402、404可以包括例如沟槽和/或一种或多种缓冲材料。
66.图9中还示出了金属端子或焊盘406、408、410、412、414、416、418和420。焊盘406-420电耦合到晶体管g1、g2、g3和g4的漏极端、源极端和栅极端,如下所述。更特别地,焊盘406连接到晶体管g1和g2的漏极端。如图3所示,晶体管g1的漏极端耦合到晶体管g2的漏极端。因此,焊盘406将这两个漏极端连接在一起并且对应于图3的节点n2。类似地,焊盘408连接到晶体管g2的源极端和晶体管g3的漏极端。如图3所示,晶体管g2的源极端耦合到晶体管g3的漏极端。因此,焊盘408对应于图3的节点n3。焊盘410连接到晶体管g3的源极端和晶体管g4的源极端。如图3所示,晶体管g3的源极端耦合到晶体管g4的源极端。因此焊盘410对应于图3的节点n4。焊盘412连接到晶体管g4的漏极端和晶体管g1的源极端。如图3所示,晶体管g4的漏极端耦合到晶体管g1的源极端。因此,焊盘412对应于图3的节点n1。
67.焊盘414连接到晶体管g1的栅极端。焊盘416连接到晶体管g2的栅极端。焊盘418连接到晶体管g3的栅极端。焊盘420连接到晶体管g4的栅极端。
68.因为焊盘414、416、418和420连接到晶体管栅极端,所以它们承载相对低的电流并且可以相对较小。相对地,焊盘406、408、410和412承载完成交流输入信号的整流所需的大的通过电流。因此,焊盘406、408、410和412大于焊盘414、416、418和420。在一个实施例中,正好有八个金属端子或焊盘406、408、410、412、414、416、418和420。
69.图10示出了根据本发明的实施例的用于同步桥式整流器的集成电路组件500。组件500包括引线框架502,该引线框架502可以包括裸片焊盘504(裸片400例如通过环氧树脂物理地安装(即机械地附接)在其上),以及金属端子或引线506、508、510、512、514、516、518和520。金属引线506、508、510、512、514、516、518和520可用于将组件500内部的电路和部件连接到组件外部的电路和部件。更特别地,引线506可以耦合到控制器u1的电源节点。引线508可以连接到节点n2(图3和图7)。引线510可以耦合到控制器u2的电源节点。引线512可以耦合到节点n3(图3和图7)。引线514可以耦合到控制器u3的电源节点。引线516可以耦合到节点n4(图3和图7)。引线518可以耦合到控制器u4的电源节点。引线520可以耦合到节点n1(图3和图7)。
70.图10中还示出了集成电路控制器u1、u2、u3和u4,其例如通过环氧树脂物理地安装(即机械地附接)在裸片400上。控制器u1、u2、u3和u4对应于图3中所示的控制器u1、u2、u3和u4。同样如图10所示,每个控制器ic包括四个金属端子或焊盘,其提供控制器ic与ic外部的电路和部件之间的连接。每个控制器ic的四个焊盘提供图3中所示的栅极端、漏极端、源极端和电源端。更特别地,控制器ic u1包括焊盘522(源极)、524(电源)、526(漏极)和528(栅极)。控制器ic u2包括焊盘530(源极)、532(电源)、534(漏极)和536(栅极)。控制器ic u3包括焊盘538(源极)、540(电源)、542(漏极)和544(栅极)。控制器ic u4包括焊盘546(源极)、548(电源)、550(漏极)和552(栅极)。
71.可以在组件500内使用接合线来将晶体管g1、g2、g3和g4、控制器ic u1、u2、u3和u4适当地连接到引线框架502。这在图11中示出。更特别地,图11示出了根据本发明的实施例的用于同步桥式整流器的集成电路组件的示例性接合线连接。
72.图11还示出了电容器c1、c2、c3和c4。更特别地,电容器c1的第一端耦合到引线506(即u1的电源节点)。电容器c1的第二端耦合到引线520(即节点n1)。电容器c2的第一端耦合到引线510(即u2的电源节点)。电容器c2的第二端耦合到引线512(即节点n3)。电容器c3的第一端耦合到引线514(即u3的电源节点)。电容器c3的第二端耦合到引线516(即节点n4)。电容器c4的第一端耦合到引线518(即u4的电源节点)。电容器c4的第二端耦合到引线516(即节点n4)。电容器c1、c2、c3和c4可以在组件500的内部。例如,电容器c1、c2、c3和c4可以例如通过环氧树脂物理地安装(即机械地附接)到相应的控制器ic u1、u2、u3和u4,或直接安装到裸片400。可替代地,电容器c1、c2、c3和c4可以在组件500的外部,如图11所示。
73.图12示出了根据本发明的替代实施例的用于同步桥式整流器的集成电路组件。图12的集成电路组件与图11的不同之处主要在于控制器u1和u3组合成单个控制器ic,称为u1/u3。为了清楚起见,并非图11的集成电路组件的所有方面都结合图12示出或讨论。例如,电容器c1和c2以及许多接合线没有示出。应当理解,图12的集成电路组件的未讨论或示出的方面,包括电容器c1和c2以及许多接合线,可以与图11的相同。
74.组合控制器u1/u3可以包括图4中所示的控制器200的两个实例,但两个源极端耦合在一起。两个电源端也可以耦合在一起并耦合电容器c3。
75.因此,如图12所示,组合控制器ic具有六个端子或焊盘538(源极)、542(漏极)和544(栅极)、548(电源)、550(漏极)和552(栅极),其对应于图11的类似的参考元件。源极端546(图11)可以省略,因为组合集成电路u1/u2可以利用与焊盘546具有相同目的的源极焊盘538。这是因为图12的晶体管g3和g4的两个源极端在节点n4处耦合在一起(这也在图3中示出)。
76.图11的电源端或焊盘540也可以省略,因为组合集成电路u1/u2可以利用与焊盘540(图11)具有相同目的的电源焊盘548。例如,组合集成电路u1/u2可以具有单个电源端supply(图4)。在提供单个电源端的情况下,电容器c4和焊盘514也可以省略。在这种情况下,组合集成电路u1/u2的控制器200(图4)的两个实例可以使用单个电容器c3。因为可以省略焊盘514,所以图10的集成电路组件可以具有七个端子,而不是图11中的八个。
77.图13a-图13d示出了根据本发明的实施例的用于同步桥式整流器的集成电路组件500的顶视图、侧视图、底视图和端视图。更特别地,图13a示出了集成电路组件500的顶视图,图13b示出了集成电路组件500的左侧正视图(右侧正视图未示出,其是左侧视图的镜像),图13c示出了集成电路组件500的底视图,图13d示出了集成电路组件500的正视图(后视图未示出,其是正视图的镜像)。环氧树脂560在集成电路组件500的顶视图、侧视图、前视图和后视图中可见。图13b的侧视图另外显示了引线510、512和514。图13c的底视图显示了引线506、508、510、512、514、516、518和520,以及散热器562,其可以物理地安装(即机械地附接)到与裸片400(图10)相对的一侧上的引线框架502(图10)。图13d的前视图显示了环氧树脂560以及引线514、516和518。
78.本发明的前述详细描述是为了说明的目的而提供的,并不旨在穷举或将本发明限制于所公开的实施例。因此,本发明的范围由所附权利要求限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。