技术特征:
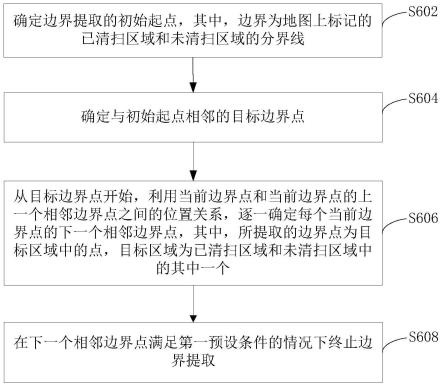
1.一种边界提取方法,其特征在于,包括:确定边界提取的初始起点,其中,所述边界为地图上标记的已清洁区域和未清洁区域的分界线;确定与所述初始起点相邻的目标边界点;从所述目标边界点开始,利用当前边界点和所述当前边界点的上一个相邻边界点之间的位置关系,逐一确定每个当前边界点的下一个相邻边界点,其中,所提取的边界点为目标区域中的点,所述目标区域为所述已清洁区域和所述未清洁区域中的其中一个;在所述下一个相邻边界点满足第一预设条件的情况下终止边界提取。2.根据权利要求1所述的方法,其特征在于,从所述目标边界点开始,利用当前边界点和所述当前边界点的上一个相邻边界点之间的位置关系,逐一确定每个当前边界点的下一个相邻边界点包括:在提取所述目标边界点的下一个相邻边界点时,将所述目标边界点作为所述当前边界点,将所述初始起点作为所述当前边界点的上一个相邻边界点;以所述上一个相邻边界点为起点,在所述当前边界点的邻域点中搜寻出满足第二预设条件的邻域点作为提取出的所述下一个相邻边界点;将本次搜寻使用的所述当前边界点更新为下一次搜寻使用的上一个相邻边界点,将本次搜寻得到的所述下一个相邻边界点更新为下一次搜寻使用的当前边界点,并按此方式继续逐一搜寻每个所述当前边界点的下一个相邻边界点。3.根据权利要求2所述的方法,其特征在于,以所述上一个相邻边界点为起点,在所述当前边界点的邻域点中搜寻出满足第二预设条件的邻域点作为提取出的所述下一个相邻边界点包括:按照预设编码模板为所述当前边界点的邻域点编码,其中,编码之后得到的图形为携带有编码方向的闭合图形;从所述上一个相邻边界点的编码开始,按照所述编码方向搜寻所述当前边界点的邻域点,直至搜寻到满足所述第二预设条件的邻域点作为提取出的所述下一个相邻边界点。4.根据权利要求3所述的方法,其特征在于,从所述上一个相邻边界点的编码开始,按照所述编码方向搜寻所述当前边界点的邻域点,直至搜寻到满足所述第二预设条件的邻域点作为提取出的所述下一个相邻边界点包括:创建前邻域点标记和后邻域点标记;将所述上一个相邻边界点的编码值赋予所述前邻域点标记和所述后邻域点标记,以使所述前邻域点标记和所述后邻域点标记共同指向所述上一个相邻边界点;在所述前邻域点标记指向的点为未清洁区域的点的情况下,或者,在所述前邻域点标记和所述后邻域点标记的编码值相等的情况下,将所述前邻域点标记的编码值赋予所述后邻域点标记,并按照编码顺序,将下一个编码的邻域点的编码值赋予所述前邻域点标记,以使所述后邻域点标记指向未修改前所述前邻域点标记指向的点,而使所述前邻域点标记指向下一个编码的邻域点;在所述前邻域点标记指向的点为已清洁区域的点且所述后邻域点标记指向的点为未清洁区域的点的情况下,或者,在所述前邻域点标记指向的点为已清洁区域的点且所述后邻域点标记指向的点为已经提取出来的边界点且所述前邻域点标记和所述后邻域点标记
的编码值不相等的情况下,将所述前邻域点标记指向的点确定为所述下一个相邻边界点。5.根据权利要求1所述的方法,其特征在于,确定边界提取的初始起点包括:将所述地图上的目标分区中未清洁区域的所有节点导入目标队列,其中,所述目标分区为待进行边界提取的分区;将所述地图上的目标分区中已清洁区域的所有节点导入目标数据表;从所述目标队列中逐一提取所述节点,并搜寻所述节点的邻域点;当所述目标队列中的节点的至少一个邻域点为所述目标数据表中的节点时,将该所述节点确定为用于边界提取的所述初始起点。6.根据权利要求1所述的方法,其特征在于,确定与所述初始起点相邻的目标边界点包括按照如下方式搜寻所述初始起点的邻域点,直至找到与所述初始起点相邻的目标边界点:随机选取一个所述初始起点的邻域点作为搜寻的起点;从所述起点开始,按照预设时针方向搜寻所述初始起点的邻域点;在搜寻到的当前邻域点为已清洁区域的点且上一个邻域点为未清洁区域的点的情况下,将所述当前邻域点确定为所述目标边界点。7.根据权利要求1至6任一所述的方法,其特征在于,所述第一预设条件包括以下其中一种:提取出来的所述下一个相邻边界点为所述初始起点;提取出所述下一个相邻边界点后,已提取的边界点的总数达到预设阈值。8.根据权利要求1至6任一所述的方法,其特征在于,通过遍历所述当前边界点的邻域点,确定所述当前边界点的下一个相邻边界点。9.一种边界提取装置,其特征在于,包括:起点确定模块,用于确定边界提取的初始起点,其中,所述边界为地图上标记的已清洁区域和未清洁区域的分界线;第一搜寻模块,用于确定与所述初始起点相邻的目标边界点;第二搜寻模块,用于从所述目标边界点开始,利用当前边界点和所述当前边界点的上一个相邻边界点之间的位置关系,逐一确定每个当前边界点的下一个相邻边界点,其中,所提取的边界点为目标区域中的点,所述目标区域为所述已清洁区域和所述未清洁区域中的其中一个;终止模块,用于在所述下一个相邻边界点满足第一预设条件的情况下终止边界提取。10.一种用于清洁机器人的边界提取设备,包括存储器、处理器、通信接口及通信总线,所述存储器中存储有可在所述处理器上运行的计算机程序,所述存储器、所述处理器通过所述通信总线和所述通信接口进行通信,其特征在于,所述处理器执行所述计算机程序时实现上述权利要求1至8任一项所述的方法的步骤。
技术总结
本申请涉及一种边界提取方法、装置及设备。该方法包括:确定边界提取的初始起点,其中,边界为地图上标记的已清洁区域和未清洁区域的分界线;确定与初始起点相邻的目标边界点;从目标边界点开始,利用当前边界点和当前边界点的上一个相邻边界点之间的位置关系,逐一确定每个当前边界点的下一个相邻边界点,其中,所提取的边界点为目标区域中的点,目标区域为已清洁区域和未清洁区域中的其中一个;在下一个相邻边界点满足第一预设条件的情况下终止边界提取。本申请从一个边界点出发,沿着一个相对方向去提取边界。提取出来的边界带方向,并且是用于指导机器人运动的。解决了清洁机器人的行走方向与提取的边界不匹配的技术问题。问题。问题。
技术研发人员:邓世玲
受保护的技术使用者:安克创新科技股份有限公司
技术研发日:2021.08.16
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。