技术特征:
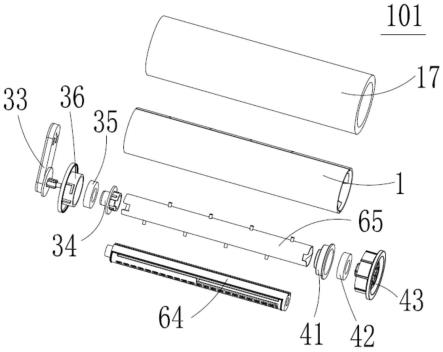
1.一种扫地机器人,其特征在于,包括:机器人本体以及维护站;所述机器人本体包括底壳以及可拆卸的安装于所述底壳上的拖布组件,所述底壳上设置有用于固定所述拖布组件的第一固定部,所述拖布组件包括拖布支架以及设置于所述拖布支架上的拖布,所述拖布支架上设置有可与所述第一固定部配合锁定的第二固定部;所述维护站包括底板、设置于所述底板上的防护壳、拆卸组件和驱动组件,所述防护壳与所述底板配合围成用于放置所述机器人本体的维护腔,所述维护腔的开口的朝向与所述底板的延伸方向平行,所述防护壳内部形成有容置空间,所述拆卸组件具有第一状态和第二状态,所述驱动组件位于所述容置空间内、用于驱动所述拆卸组件在第一状态和第二状态之间切换;当所述拆卸组件处于所述第一状态时,所述拆卸组件位于所述容置空间内;当所述拆卸组件位于所述第二状态时,所述拆卸组件可由防护壳上的通孔伸入所述维护腔内,以使位于所述维护腔内的所述机器人本体上的所述第一固定部和所述第二固定部解除锁定。2.根据权利要求1所述的扫地机器人,其特征在于,所述第二固定部包括至少一组锁扣组件,每组所述锁扣组件包括沿第一方向排列、且相互配合的第一锁扣和第二锁扣,所述锁扣组件具有卡合状态以及解除卡合状态;所述第一固定部包括与所述锁扣组件一一对应的至少一组卡钩组件,所述卡钩组件包括可与所述第一锁扣配合卡合的第一卡钩部以及可与所述第二锁扣配合卡合的第二卡钩部;当所述锁扣组件处于所述卡合状态时,所述第一锁扣和第二锁扣分别与所述第一卡钩部和第二卡钩部卡合,以使所述第一固定部与所述第二固定部固定连接;当所述锁扣组件处于所述解除卡合状态,所述第一锁扣和第二锁扣分别与所述第一卡钩部和第二卡钩部解除卡合,以使所述第一固定部和第二固定部解除锁定。3.根据权利要求2所述的扫地机器人,其特征在于,所述第一锁扣包括沿第二方向延伸的第一卡钩臂,所述第二锁扣包括沿第二方向延伸的第二卡钩臂,所述第一卡钩臂上的卡钩的弯折方向与所述第二卡钩臂上的卡钩的弯折方向相背离,所述第一方向与所述第二方向相互垂直;当所述锁扣组件处于所述卡合状态时,所述第一卡钩臂与所述第二卡钩臂之间距离第一间距,所述第一卡钩臂上的卡钩和所述第二卡钩臂上的卡钩分别与所述第一卡钩部和第二卡钩部配合卡合;当所述锁扣组件处于所述接触卡合状态时,所述第一卡钩臂与所述第二卡钩臂之间距离第二间距,所述第二间距小于第一间距,所述第一卡钩臂上的卡钩和所述第二卡钩臂上的卡钩分别与所述第一卡钩部和第二卡钩部解除卡合。4.根据权利要求3所述的扫地机器人,其特征在于,所述第一卡钩部与所述第二卡钩部相互平行设置、且所述第一卡钩部与所述第二卡钩部之间的距离大于第一距离,所述第一卡钩部的弯折方向与所述第二卡钩部的弯折方向相对,所述第一卡钩部的顶面和所述第二卡钩部的顶面形成有两个相对的第一斜面,所述第一卡钩臂的顶面与所述第二卡钩臂的顶面形成有与所述第一斜面相配合的第二斜面。5.根据权利要求3所述的扫地机器人,其特征在于,所述第一锁扣还包括沿第一方向延伸、且与所述第一卡钩臂远离所述第二卡钩臂的一侧连接的第一连接部,所述第二锁扣还
包括沿第一方向延伸、且与所述第二卡钩臂远离所述第一卡钩臂的一侧连接的第二连接部;所述拖布支架上设置有第一滑道和第二滑道,所述第一连接部与所述第一滑道可滑动连接,所述第二连接部与所述第二滑道可滑动连接。6.根据权利要求5所述的扫地机器人,其特征在于,所述第一连接部远离所述第一卡钩臂的一端设置有与所述第一滑道滑动连接第一限位端,所述第二连接部远离所述第二卡钩臂的一端设置有与所述第二滑道滑动连接的第二限位端;所述第一滑道内具有位于所述第一限位端与所述第一卡钩臂之间、且沿所述第一限位端指向所述第一卡钩臂的方向排列的第一限位部和第二限位部;所述第二滑道内具有位于所述第二限位端与所述第二卡钩臂之间、且沿所述第二限位端指向所述第二卡钩臂的方向排列的第三限位部和第四限位部;所述第一限位部和第三限位部分别用于在所述锁扣组件位于所述解除卡合状态时限制所述第一限位端和第二限位端的位置,所述第二限位部和第四限位部分别用于在所述锁扣组件位于所述卡合状态时限制所述第一卡钩臂和第二卡钩臂的位置。7.根据权利要求5所述的扫地机器人,其特征在于,所述锁扣组件还包括第一弹簧和第二弹簧;所述第一弹簧套于所述第一连接部位于所述第一限位端与所述第一卡钩臂之间的区域上、且远离所述第一限位端的一端固定于所述拖布支架上;所述第二弹簧套于所述第二连接部位于所述第二限位端与所述第二卡钩臂之间的区域上、且远离所述第二限位端一端固定于所述拖布支架上;当所述锁扣组件处于卡合状态时,所述第一弹簧和第二弹簧处于释能状态;当所述锁扣组件处于解除卡合状态时,所述第一弹簧和第二弹簧处于蓄能状态。8.根据权利要求4-7任一项所述的扫地机器人,其特征在于,所述拆卸组件包括第一拆卸杆和第二拆卸杆,当所述机器人在所述维护腔内时,所述第一拆卸杆的第一端与所述第一连接部远离所述第一卡钩臂的一端相对,所述第二拆卸杆的第一端与所述第二连接部远离所述第二卡钩臂的一端相对;当所述拆卸组件处于所述第一状态时,所述第一拆卸杆和所述第二拆卸杆位于所述容置空间内;当所述拆卸组件处于所述第二状态时,所述第一拆卸杆和所述第二拆卸杆伸入所述维护腔内,所述第一拆卸杆与所述第一连接部远离所述第一卡钩臂的一端相抵以使所述第一卡钩臂朝向所述第二卡钩臂移动,所述第二拆卸杆与所述第二连接部远离所述第一卡钩臂的一端相抵以使所述第二卡钩臂朝向所述第二卡钩臂移动。9.根据权利要求8所述的扫地机器人,其特征在于,所述第一连接部与所述第一拆卸杆相对的区域设置有第一定位槽,所述第二连接部与所述第二拆卸杆相对的区域设置有第二定位槽。10.根据权利要求8所述的扫地机器人,其特征在于,所述驱动组件包括第一齿条、第二齿条、第一齿轮、第二齿轮、第一电机、第二电机;其中,所述第一齿条与所述第一拆卸杆的第二端连接、且与所述第一拆卸杆的延伸方向相同,所述第一齿轮与所述第一齿条相啮合、且设置于所述第一电机的转轴上;所述第二齿条与所述第二拆卸杆的第二端连接、且与所述二拆卸杆的延伸方向相同,
所述第二齿轮与所述第二齿条相啮合、且设置于所述第二电机的转轴上。11.根据权利要求10所述的扫地机器人,其特征在于,所述容置空间内还设置有控制单元,所述控制单元用于控制所述第一电机和所述第二电机旋转。
技术总结
本发明公开了一种扫地机器人,该扫地机器人包括机器人本体和维护站;机器人本体包括底壳及可拆卸的安装于底壳上的拖布组件,底壳上设置有第一固定部,拖布组件包括拖布支架,拖布支架上设置有可与第一固定部配合锁定的第二固定部;维护站包括底板、设置于底板上的防护壳、拆卸组件和驱动组件,防护壳与底板配合围成维护腔,防护壳内部形成有容置空间,驱动组件位于容置空间内、用于驱动拆卸组件在第一状态和第二状态之间切换;当拆卸组件处于第一状态时,拆卸组件位于容置空间内;当拆卸组件位于第二状态时,拆卸组件可伸入维护腔内,以使第一固定部和第二固定部解除锁定。该扫地机器人能够实现拖布组件的自动拆卸且能够提高扫地机器人的可靠性。扫地机器人的可靠性。扫地机器人的可靠性。
技术研发人员:聂士全 黄国良
受保护的技术使用者:浙江欣奕华智能科技有限公司
技术研发日:2021.07.22
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。