1.本发明涉及一种根据权利要求1的前序部分所详细限定类型的用于检测用至少一个手指执行的操作输入的方法。另外,本发明涉及一种用于执行本发明的方法的操作装置。
背景技术:
2.就像可能用在本发明方法中的用于检测操作输入的传感器系统例如由申请人的de 10 2011 112 567 a1公开了。在那里描述的机动车用操作装置包括用于发射信号至手指的发射单元和用于接收手指所反射的信号的至少一个接收单元。对此,只要相应信号能够被发出、被手指反射并又被传感器系统接收,信号类型原则上无关紧要。它们尤其是可以设计成光学信号形式,其随后相应地被摄像机采集,不仅在可见范围内、也在红外范围内。此外可以想到超声波信号等。传感器系统在此设计成:它检测手指轮廓的基本各不相同的接触点。这种传感器系统也被称为光学手指导航(ofn)或者例如设计成指纹传感器。
3.优点基本上是手指没有像在触摸屏时那样在较大表面上移动,而是在相对小的表面上移动和滚动。真正的传感器在此是点状或线状的,例如在一维传感器情况下呈一条直线形式或在两维传感器情况下呈两条交叉的线形式。
4.这样的传感器的缺点现在主要是无法实现或只能差地实现对操作者的反馈,因此反馈一般仅通过例如计算机对相应输入的响应来实现,为此例如使用传感器的人应该在其想要所述反馈时观看屏幕。
5.关于其它现有技术还参照us 2019/0354185 a1。它描述产生驻波,驻波覆盖例如触摸屏整个表面并由此在手指扫过表面时在触摸屏的本身光滑的表面上以不同阻力对抗手指。本身光滑的表面因此可以如此置于固定振动中,即,使用者的手指表面感觉到一种由交替波峰波谷形成的沟纹且因此能容易地给其运动分配一定位移距离。所述文献于是附加利用驻波中的变形来探测触屏表面上的手指位置。
技术实现要素:
6.此处所提出的发明的任务现在是以上述的方式进一步改进一种用于用传感器检测操作输入的方法并且还指出一种适用于此的操作装置。
7.根据本发明,该任务通过一种具有权利要求1的特征且在此尤其是权利要求1的特征部分特征的方法来完成。该方法的有利设计和改进方案来自其从属权利要求。在权利要求7中指明一种用于执行本发明方法的操作装置。也与操作装置相关地从其从属权利要求中得到有利的设计和改进方案。
8.根据本发明的方法用于通过利用传感器系统识别手指轮廓在传感器表面上的各不同接触点来检测用至少一个手指执行的操作输入。该传感器系统具有至少一个发射信号至手指的发射单元和至少一个用于接收由手指反射的信号的接收单元。因此,传感器未被设计成大面积的触敏表面,而是设计成基本为点状的传感器,其相应测量手指在传感器上方的滚动运动和/或移动运动,就像例如在指纹传感器或所谓的光学手指导航传感器时那
样。这具有以下优点,即,传感器能很小地实现并且可以测知在一个维度上或在两个尤其可以相互垂直且由此允许平面运动分辨的维度上的运动。
9.根据本发明现在是这样的:该传感器表面通过至少一个致动器被置于表面振动中,通过表面振动,在手指与传感器表面之间的摩擦阻力依据手指轮廓的变化的接触点、即最终依据手指在点状传感器表面上的滚动和/或手指经过点状传感器表面的移动而改变。由此可以首次实现对用户的触觉反馈,因为不同的摩擦可以被手指触知或感觉,并且与光学信号或声学信号无关地允许对用户的可靠反馈。
10.但根据该构想的一个有利改进方案,这可以附加地由光学信号和/或声学信号辅助地产生反馈,其中,触觉反馈在本发明方法中很重要并通过将振动加入传感器表面来实现。
11.本发明的方法的一个极其有利的改进方案在此可以规定,表面振动随时间被改变,从而在手指在传感器表面上的接触点下方的区域中得到一连串/序列的较大和较小的振幅和/或频率。通过该频率或尤其是振幅,在手指与传感器表面之间的摩擦阻力可以相应改变,因为通过振动继续朝手指运动的传感器表面以比进一步远离手指的表面更大的摩擦阻力对抗手指。该作用可以直接通过振幅的控制和作为其补充或替代也通过频率变化和例如由此导致的传感器表面或其部分的谐振性能来获得。
12.本发明方法的一个很有利的设计还可以规定,在手指的接触点下方的区域中的表面振动的变化突然地、连续地或按照预定函数/功能(funktion)进行,以便分别获得期望触觉效果的展示。触觉感知在此在手指在传感器表面上的与滑动或移动相关的滚动期间由前后接连的不同的多个摩擦阻力或摩擦力获得。视期望的触觉效果的不同,在各单独的摩擦阻力之间和进而最终在其造成的振动之间的过渡可设计为各种各样。因此,例如可以产生突然过渡,其例如模拟按键锁定、滚轮状旋转开关绕卡销运动等作为期望触觉效果。其它效果可以更容易地通过振幅和/或频率变化的斜率或曲线来实现,例如以随运动增大的阻力来模拟示踪球、操纵杆等的运动。
13.本发明方法的一个极其有利的改进方案在此可以规定,表面振动的变化如此进行,即,通过增大和减小振幅和/或频率来如此改变摩擦阻力或摩擦力,即,可一维转动或两维转动的滚轮的效果利用其转动运动的分挡制动(rastung)而被触觉模拟。这导致就像例如可用在车辆驾驶舱中那样的很简单高效的应用。滚轮因此可以在传感器表面所需的最小结构空间上简单高效地被模拟。用户例如可以在其专心于交通事件时也仅通过触觉反馈操作该滚轮,优选利用其转动运动的分挡制动,以便因此例如完成亮度调节、照明范围调整、多媒体设备上的设定、菜单选择等。该结构在此在机械方面极其简单耐用,因为完全不需要可运动部件。但还是可以通过本文所述方法首次可实现的触觉反馈来实现这种可转动的滚轮的极其逼真的展示,其被用户完全就像使用机械滚轮时那样感知。这在此可以在一个维度上进行,即仅沿在一个平面内的一个转动方向进行,或者作为两维滚轮能不仅在一个方向上、也在另一个例如与之垂直的方向上相应运动进行。
14.本发明方法的一个极其有利的改进方案还可以规定,该振幅和/或频率的变化的调整依据手指轮廓在传感器表面上的接触点的运动的位移-时间曲线自适应进行。例如振幅大小的这种自适应调整是可行的,因为通过传感器近似采集手指轮廓在传感器表面上的移动和/或滚动的位移-时间曲线。如果位移-时间曲线对应于预期运动如分挡制动式滚轮
的运动,则该位移-时间曲线大致遵循期望的触觉反馈和进而由表面振动产生的过程。如果不是这种情况并且通过位移-时间曲线所测知的运动并非像通过期望触觉效果所预期的那样且尤其是这样的,即,手指运动比之预期明显更均匀,则显然该期望的触觉反馈未被用户充分感知。因此现在可通过增大振幅和/或频率的变化还更清晰地安排触觉反馈。而如果该运动被明显过于剧烈或不连贯,则该触觉反馈的强度也可被减轻。为此减小例如振幅变化。所述变化在此自适应进行,从而可最后依据用户如此进行调整,使得用户视其手指自身敏感性的不同而感觉到大致相同的触觉反馈,以便因此在短暂操作时间后通过自适应调整来给各不同的人提供总是大致相同的触觉反馈。
15.如上所述,除了触觉反馈外,在振幅和/或频率中的至少其中几个变化还伴随声学信号和/或光学信号。它们例如可以在声学信号情况下通过扬声器实现,或通过光学机构例如像显示器、发光件等实现。优选地例如通过由摩擦曲线所模拟的卡位,前述的滚轮反馈被辅助以对应于机械滚轮的卡位噪声。在光学信号情况下原则上也可以想到,在借助发出可见光来光学检测手指的情况下将该光同时用于光学反馈,例如通过在传感器表面区域或者传感器表面旁边区域中的附加发光窗。
16.根据本发明的用于执行所述方法的操作装置在其中一个设计中现在包括这种用于识别手指轮廓在传感器表面上的各不同接触点的传感器系统,其具有用于发射信号至手指的发射单元和用于接收手指所反射的信号的至少一个接收单元。本发明在此规定,传感器表面的至少两个侧边缘至少间接分别连接到至少一个压电致动器。因此可通过至少两个压电致动器将振动加入传感器表面,该传感器根据本发明操作装置的一个很有利的改进方案被设计成光学手指导航传感器或指纹传感器。故第一次可以将直接借助传感器表面的触觉反馈与相应小的、取代于检测手指在表面上的运动而检测手指在传感器表面上的移动和/或滚动的传感器相结合。以极其小的结构空间,可以很高效地构建操作装置,借此可以实现例如菜单控制等,在这里,通过直接触觉反馈可实现简单、高效且基本直观的操作。
17.根据本发明操作装置的一个很有利设计,在此可以规定,传感器表面的对置的两个侧边缘和两个与之垂直对置的侧边缘至少间接分别连接到至少一个压电致动器。传感器表面的垂直对置的侧边缘可通过致动器被激励振动的所述布置现在允许实现在本发明方法中已提到的例如两维滚轮、操纵杆等的结构,因为能够在传感器表面的两个表面方向上产生相应的振动并且以不同的摩擦阻力或摩擦力对抗手指。
18.此外,该操作装置在此可以根据本发明的一个很有利的改进方案具有至少间接输出声学信号和/或光学信号的装置,从而作为触觉反馈的补充可以进行声学反馈或光学反馈。现在,这可以直接在传感器区域进行,就像在借助光信号的光学反馈时已描述的那样。但这也可以间接进行,做法是传感器间接实现合适的输出,例如通过将信号输出给媒介设备以产生声学反馈,媒介设备通过与之连接的扬声器相应播放它,尤其在被用在车辆中时。
19.现在已经多次提到的车辆在此也是这种操作装置的和进而前言所述的本发明方法的一个或多个所示实施方式的优选应用目的。尤其在那里,提供触觉反馈的小型操作装置是很有利的,因此用户在操作期间可以更专注于交通。
附图说明
20.所述方法以及操作装置的其它有利设计也来自以下参照图所详细表示的实施例,
其中:
21.图1示出传感器系统及其操作的原理图,
22.图2示出具有用于产生表面振动的致动器的传感器表面的图示,
23.图3示出滚轮操作连同所属力曲线的示意图,
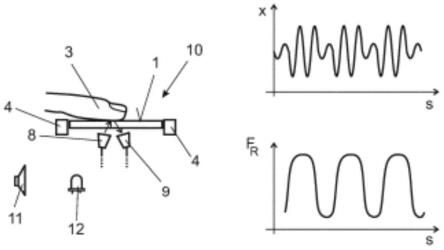
24.图4示出图3的实施例在本发明的操作件中的实现。
具体实施方式
25.在图1的图示中能看到带有传感器2的表面1的示意图,传感器识别手指3轮廓的各不同接触点,手指基本以半扫划/移动半滚动的运动被引导经过传感器2,就像由箭头和在晚些运动时刻的手指点状显示所表明的那样。这种传感器2通常被称为光学手指导航传感器(ofn)或指纹传感器或被用作这种光学手指导航传感器或指纹传感器。在此,所述结构和操作就此对应于现有技术。优点是可以相应小地构造传感器2,例如在一维检测中呈线状构成,或在检测也垂直于页面的运动时相应由两个交叉的线状部分构成。这允许很小的传感器表面。
26.在图2的图示中再次以俯视图示意性示出这种操作装置10的表面1。以下被称为传感器表面1的表面在至少两个、优选在所有四个其侧边缘处配设有相应的致动器4、优选是压电致动器4,它们能将此处示意性所示的表面振动5加入到传感器表面1中,以便因此在手指3触摸传感器表面1时通过不同的振动状态产生不同的摩擦阻力或摩擦力fr。由此,这种传感器系统的操作的触觉反馈可以在总体被称为操作件10的结构中实现。
27.以下这应以滚轮的单纯示例性的一维的操作为例来说明,其中,在传感器表面1的所有四侧设置压电致动器4时它也可以在两维上相应延伸。
28.在图3的图示中,现在示例性示出在表面7中的一个滚轮6。它被手指3相应运动,例如做法是它被转动一个转动角度α,尤其在图3的图示中沿箭头方向。滚轮6本身在此应该具有机械分挡制动机构,使得滚轮6的运动以若干单独的前后相继的运动进行,这些运动在其间通过各自分挡制动和随之而来的摩擦增大被中断。此时出现的力f在图3的图示中的右侧的曲线图中关于转动角度α例如针对三个分挡制动被绘制。因此,滚轮6的机械结构连同其分挡制动机构关于转动角度α得出在图3的右侧示出的力曲线,其在机械结构中提供直接反馈给手指3且因此最终提供给以其手指3操作滚轮6的用户。
29.该结构和触觉反馈现在可以通过操作装置10来简单高效地相应模拟,而无需可能磨损的机械构件。在图4的图示中又能看到手指3,其位于操作装置10上方并且以在光学手指导航中常见的方式相应操作它,做法是手指3在此又例如在一个维度上在传感器表面1上方运动,尤其按半扫划半滚动方式。在这里在传感器表面1下方能看到真正的传感器系统的用于发射信号的发射单元8和用于接收由手指3反射的信号的接收单元9。未进一步介绍详细结构,其例如可以从前言所述的同类型的申请人文献中得到。
30.除了本身已知的传感器系统结构外,现在在这里也设有多个压电致动器4,在此只能看到其中的两个。它们直接或间接连接至传感器表面1并且能将上文已指明的表面振动5加入到传感器表面1。按照借助传感器表面1的期望触觉反馈,表面振动5现在被相应调整。如果例如应该产生如在图3的图示中所解释的滚轮6的触觉反馈,则所述振动例如依照在图4中的右上侧示出的曲线图来实现。在此曲线图中,关于手指3或手指尖在传感器表面1上方
扫划和/或滚动的位移s,表面振动5的幅值x被绘制。在此,在具有不同幅值的振动之间切换,确切说是这样的:手指3在传感器表面1上的摩擦力fr在其运动时以在图4的右下方示出的方式出现。由此可以相对精确地作为操作装置10对手指3的触觉反馈实现滚轮6的力学特性。
31.除了借助传感器表面1的表面振动5的纯触觉反馈外,可以补充地也通过声学信号和/或光学信号一并表明表面振动5的变化、例如振幅变化,声学信号和/或光学信号补充或辅助触觉反馈。为了指明这一点,在图4中在操作装置10下方作为用于附加可能的声学反馈的符号单纯举例示出扬声器11,并且作为用于可能的附加光学反馈的符号示出led 12(发光二极管)。除了借助所示led 12的纯光学信号外,也可以通过在屏幕上的显示进行光学反馈,例如做法是进一步切换位于那里的菜单并且相应显示被选中的下一菜单项等。所有这些将在本说明书意义上落入光学反馈范围。
32.利用最小结构空间且不需要安装机械部件(其转动和其它形式的运动须被检测),现在可很简单地将光学手指导航传感器与可靠的触觉反馈组合。触觉反馈在此可通过振幅x和/或振动频率的调整而被几乎任意调整,以因此例如通过在手指3与传感器表面1之间的摩擦力fr的变化来调节所述滚轮6或也调节任何其它类型的机械运动。由此,例如滚轮6、按键、操纵杆、示踪球等关于其反馈能够通过由表面振动5在传感器表面1中产生的触觉反馈被模拟。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。