1.本发明涉及一种用于制备食物的食物制备器具。食物制备器具包括食物制备容器,在该食物制备容器中可制备食物。食物制备器具包括用于食物制备容器的盖子。食物制备器具包括用于在将盖子放置在食物制备容器上时锁定盖子的锁定装置。食物制备器具包括传感器,当锁定装置锁定所放置的盖子时触发该传感器。食物制备器具包括多部件附件(附加部件)。本发明还涉及用于食物制备容器的多部件附件以及方法。
背景技术:
2.从公开文献de 102014111193a1和de 102017121946a1中已知具有食物制备容器和用于该食物制备容器的盖子的电动食物制备器具。放置在食物制备容器上的盖子可用电动锁定装置锁定。一旦盖子被锁定,它就不再能够从食物制备容器释放。为了释放盖子,必须首先解锁锁定装置。
3.借助于传感器,可在这种食物制备器具中检查盖子是否放置在食物制备容器上并且是否正确地锁定。基于此,可控制食物制备器具的进一步操作。具有用于检查所放置盖子的锁定的传感器的食物制备器具由德国伍珀塔尔(wuppertal,germany)的vorwerk deutschland stiftung&co.kg以品牌销售。
4.对于食物处理机,存在由多个部件组成且用于蒸汽烹饪的附件,例如附件。多部件附件包括具有蒸汽可透过的底部的容器状基体和用于该基体的盖子。附件放置在用于蒸汽烹饪的食物处理机的锁定盖子上。然而,这样就无法检查附件的部件是否已经由用户组装好,并且附件是否已经以使得食物能够通过蒸汽烹饪按计划制备的方式被放置在食物制备容器上。
技术实现要素:
5.本发明的目的在于,提供可以可靠地使用食物处理机中的多部件附件。
6.本发明的目的通过具有第一项权利要求的特征的食物处理机来解决。附加权利要求涉及一种用于食物处理机的附件。另一附加权利要求涉及一种方法。有利的实施方案由从属权利要求得出。
7.本发明的食物制备器具包括食物制备容器和能够放置在食物制备容器上的盖子。食物制备器具具有可代替盖子放置在食物制备容器上的附件。附件包括两个部件,即第一部件和第二部件。食物制备器具包括锁定装置,该锁定装置用于锁定放置在食物制备容器上的盖子,并且用于锁定放置在食物制备容器上的附件。食物制备器具包括传感器,当所放置的盖子被锁定装置或者被所放置的附件锁定时,该传感器被触发。当仅将附件的一部分放置在食物制备容器上并锁定时,不触发传感器。
8.根据本发明的食物制备器具是电器,即需要电力来操作的器具。根据本发明的食物制备器具是一种器具,利用该器具可执行食物制备的至少一个步骤,例如混合、切碎、润湿、干燥、冷却或加热。因此,通过食物制备器具,食物或食物的至少一种配料可例如被混
合、切碎、润湿、干燥、冷却和/或加热。食物可以是固体和/或液体。食物可仅包含一种食品,例如仅包含马铃薯。食物可由各种配料组成,例如胡萝卜、豌豆、洋葱、盐和胡椒。食物可包括液体,诸如水或油。
9.提供了用于制备食物的食物制备容器。直接放置在食物制备容器中的食物配料可例如被可转动的混合工具切碎。食物制备容器可包括用于加热食物制备容器中的食物配料或食物的加热元件。然而,食物制备器具还可包括用于加热食物制备容器的加热元件,这些加热元件与食物制备容器分开设置。食物制备器具的基部部件可包括能够限定食物制备容器的位置的凹部。凹部可以是容器状的凹坑,食物制备容器可插入或已插入该凹坑中。凹部可包括防止液体积聚在该凹部中的排放口。特别地,食物制备容器可从切口(cutout)移开,从而与食物制备器具的基部部件分离。
10.食物制备容器包括开口。盖子可以这样的方式放置在食物制备容器上,使得随后开口被盖子覆盖。
11.附件与盖子的功能不同。盖子的功能在于能够完全或至少大部分完全封闭食物制备容器。附件可以其他方式有助于食物的制备。例如,附件可切碎食物或食物配料。由于盖子不能切碎,所以盖子的功能与附件的功能不同。
12.不排除附件也能够完全或至少几乎完全封闭食物制备容器。然而,本发明意义上的附件必须能够执行除此之外的至少一种功能。
13.附件包括第一部件和第二部件,只要这两个部件可非破坏性地彼此释放和重新组装。不需要工具来拆卸。
14.这两个部件可以这样的方式组装,使得它们随后例如通过卡入式彼此连接。为了随后再次将这两个部件彼此释放,必须首先释放卡入式连接。如果卡入式连接被释放,则在本发明的意义内,这两个部件没有被组装。这种卡入式连接可包括例如能够移动到锁定位置和解锁位置的闩锁。在锁定位置,闩锁然后可以被接合,以使得闩锁不能以非计划的方式移动离开锁定位置。
15.可能的是,这两个部件仅可被松散地组装。松散组装的一个示例是当一个第一部件可插入到第二部件为此设置的凹部中时。如果第一部件插入第二部件为此设置的凹部中,则在本发明的意义上,这两个部件被组装。那么在本发明的意义上,这两个部件仅被松散地组装,因为提起第一部件就足以将其从第二部件释放。因此,在松散组装的情况下,没有连接装置在这两个部件之间提供固定的机械连接并且必须首先将其释放以便能够将两个部件彼此分离。
16.附件可包括两个以上的部件,它们可以被组装以形成附件并且在没有工具的情况下彼此分离。
17.当盖子被放置在食物制备容器上时,锁定装置可锁定盖子。如果盖子被锁定,则盖子不能再从食物制备容器释放。如果要从食物制备容器释放盖子,则必须首先解锁锁定装置。
18.如果附件已代替盖子放置在食物制备容器上,则锁定装置可锁定附件。为了从食物制备容器释放附件,则还必须首先解锁锁定装置。这适用于附件的至少两个部件。如果附件包括两个以上的部件,则当锁定装置锁定附件时,附件的所有部件不一定都不能释放。例如,附件可包括四个部件。如果附件被锁定,例如,三个部件不能被释放,而第四部件可被释
放。然而,也有可能的是,附件使得当附件已被锁定装置锁定时所有四个部件都不能被释放。可能的是,例如,附件包括五个部件。如果附件被锁定,例如,四个部件不能被释放,而第五部件可被释放。
19.食物制备器具的基部部件可包括锁定装置,该锁定装置可在锁定状态下将盖子不可拆卸地连接到食物制备容器。如果食物制备器具使得食物制备容器能够从基部部件释放,则根据本发明的食物制备容器上的盖子放置或附件放置包括食物制备容器不从基部部件释放。例如,然后将食物制备容器插入基部部件的凹部中。该基部部件可包括控制装置、电驱动器、传感器、开关和/或显示器。
20.传感器可处于触发状态和非触发状态,并且发出其所处状态的信号。因此,传感器可呈现两种不同的状态。状态的信号通知可通过电信号完成。食物制备器具通过传感器验证锁定状态和解锁状态,因为当所放置的盖子或所放置的附件被锁定装置锁定时,该传感器被触发。另选地或附加地,食物制备器具可指示锁定状态或解锁状态。如果仅将附件的一部分放置在食物制备容器上并锁定,则不触发传感器。该部件可以是第一部件或第二部件。如果所放置的附件和所放置的盖子均未被锁定,则不触发传感器。如果附件或盖子仅放置在食物制备容器上但未被锁定,则不触发传感器。因此,传感器通过锁定触发。然后它处于触发状态。解锁使传感器进入非触发状态。因此,在解锁之后,传感器处于非触发状态。
21.由于附件包括两个部件,所以用户可能无意中仅将附件的一个部件放置在食物制备容器上。可能的是,例如,用户随后以这样的方式操作食物制备容器,即,锁定所放置部件使得所放置部件不能再从食物制备容器释放。因为在仅锁定附件的一个部件之后没有触发传感器,所以食物制备器具可检测到故障。例如,然后可向用户指示故障的存在。这允许用户迅速地确定附件的一个部件缺失。然后,用户可及时地排除故障。因此,能够以改进的方式确保无故障运行。也有可能的是,食物制备容器在故障排除之前不允许进一步的处理步骤。同样,以这种方式,可避免可能与故障相关的问题。
22.在一个实施方案中,锁定装置使得处于放置状态的附件通过锁定从初始位置移动到终止位置。将附件移动到终止位置触发传感器。在终止位置,附件被锁定。因此,当附件处于终止位置时,传感器被触发。
23.可能的是,例如,附件被放置然后转动以到达终止位置,从而到达锁定位置。例如,附件的转动可由用户手动的执行。然而,转动也可机动的执行。
24.在放置状态下,例如,附件的可弹性变形的密封环或不同形状的弹性密封件可搁置在食物制备容器上。然后,由于可弹性变形的密封环或不同形状的弹性密封件可被压缩,因此附件可例如通过锁定装置进一步沿食物制备容器的方向移动。因此,可变形密封环或不同形状的弹性密封件的存在允许所放置的附件在放置之后从其初始位置线性移动到其终止位置。当解锁时,可弹性变形的密封环或不同形状的弹性密封件使附件移动回到其初始位置。该移动可再次由用户手动实现。然而,在该实施方案中,有可能以特别简单的方式,以机动的方式执行在终止位置方向的移动。
25.可能的是,通过将附件放置在食物制备容器上,附件也被放置在机械开关的弹性组件上。机械开关可被布置成使得至少在机械开关附近,在附件与食物制备容器之间保留间隙。例如通过倾斜移动,附件然后可例如通过锁定装置进一步朝向终止位置枢转。由此操作机械开关,即其弹性部件,并由此触发开关。进入终止位置的移动可再次以技术上简单的
方式机动化。附件回到其初始位置的移动可通过弹性部件的弹性力和/或通过弹性密封件来实现。
26.上述情况相应地适用于盖子。然后,锁定装置也使得处于放置状态的盖子通过锁定从初始位置移动到终止位置。通过使盖子移动到终止位置来触发传感器。在终止位置,盖子被锁定。因此,当盖子处于终止位置时触发传感器。
27.在一个实施方案中,锁定装置使得附件的第一部件通过锁定从初始位置移动到终止位置。第一部件通过锁定将附件的第二部件从初始位置移动到终止位置。第二部件在第二部件处于其终止位置时触发传感器。
28.因此,第二部件不直接移动到终止位置,例如通过锁定装置以机动的方式移动。相反,这由第一部件完成。如果第一部件不存在,则第二部件在锁定期间不能从初始位置移动到终止位置。相反地,可能的是,例如,第一部件可以机动的方式移动到终止位置,并且在不存在第二部件的情况下由锁定装置锁定。
29.在一个实施方案中,第二部件是容器,第一部件是用于容器开口的覆盖件。可将覆盖件放置在容器上。然后,容器的开口至少部分地封闭。容器使得它可插入食物制备容器中。容器优选在其上侧具有加宽部,该加宽部能够放置在食物制备容器的开口边缘上。因此,加宽部始终位于食物制备容器的外部。因此,即使当容器的其余部分插入食物制备容器中时,该加宽部基本上从外部可见。此外,如果将覆盖件放置在容器上,则该加宽部基本上也从外部可见。容器的加宽部可以是圆形的或部分圆形的。
30.优选地,容器包括用于覆盖件的支架,使得当将该覆盖件放置在容器上时,该覆盖件由该支架固定以防止侧向滑动。
31.在一个实施方案中,容器在其上侧至少部分地具有侧向突出的边缘。然后,边缘以凸缘状方式从容器的其余部分侧向突出,并在容器的上侧加宽容器。容器的这种加宽部可包括用于覆盖件的凹部。覆盖件可插入凹部中。因此,加宽部的凹部能够防止覆盖件侧向滑动。因此,凹部用作支架或者可以是该支架的一部分。凸缘状突出的边缘可完全或至少部分地包围容器的开口。
32.在一个实施方案中,传感器可由容器的凸缘状和/或侧向突出的边缘触发。例如,当容器已插入食物制备容器中时,容器的侧向突出的边缘可搁置在电开关的按钮或摇臂上。然后,将容器以这样的方式插入食物制备容器中,即,位于电开关处的侧向突出的边缘的至少一部分能够克服按钮的弹簧力被向下按压。如果容器的侧向突出的边缘被向下按压,则按钮或摇臂被移动,从而触发电开关。因此,电开关是本发明意义上的传感器。然而,也可以例如通过光学或例如通过超声波来检测侧向突出的边缘或侧向突出的边缘的一部分从初始位置到终止位置的移动。
33.在一个实施方案中,容器在其上侧包括至少一个向上和/或侧向突出的手柄。如果手柄侧向突出,则手柄可用作加宽部,该加宽部防止容器完全滑入食物制备容器中。如果手柄向上突出,则它可防止覆盖件侧向滑动,因此至少是覆盖件的支架的一部分。如果手柄侧向和向上突出,则手柄既可用作加宽部又可用作用于覆盖件的支架。
34.在一个实施方案中,附件包括用于切碎食物的切碎工具(切割工具)。切碎工具相对于容器布置或者能够布置成使得食物或者食物配料在被切碎工具切碎之后,由于重力落下而被收集在附件的容器中。切碎工具可以是可转动的,以通过转动切碎食物或食物配料。
例如,切碎工具可以是可转动的摩擦盘。这种摩擦盘可包括向上突出的齿。此外,摩擦盘可包括孔,以允许食物配料被齿切碎以穿过摩擦盘并落入容器中。
35.特别地,切碎工具具有至少一个用于切碎的切割边缘。切碎工具可以是切割盘。它可具有细长的、基本上径向布置的刀片,用于切割例如马铃薯的切片。切碎工具可另选地或附加地具有局部凹部或凹陷,该凹部或凹陷设有刀片,例如用于切碎蔬菜。功能可取决于切割盘的转动方向。例如,在切割盘的一个转动方向上切成条,而在相反方向上切成切片。
36.切碎工具能够特别受控地切割食物的配料,因为食物或配料在切割之后落入容器中并且不能被进一步切割。
37.容器可包括中心和/或竖直延伸的开口,食物制备器具的驱动轴可穿过该开口以便驱动切碎工具。食物制备器具可被构造成使得在容器的这种定位状态下,轴延伸穿过食物制备容器,以便通过位于食物制备容器下方的电动机来驱动切碎工具。轴可以是多部件的,并且包括将轴的不同部分彼此连接的联接元件。
38.在有利的实施方案中,轴的一部分可以转动固定的方式将食物制备器具的混合工具连接到切碎工具。混合工具的转动然后导致切碎工具以相同的转动速度转动。轴的该部分尤其可从混合工具释放,以便能够独立于具有轴的相关部分和容器的切碎工具使用具有位于其中的混合工具的食物制备器具。切碎工具可牢固地连接到轴的该部分。然而,也有可能的是,将切碎工具可拆卸地连接到轴的所述部分,以便于存储和清洁。
39.在一个实施方案中,切碎工具可转动地布置在容器的外壳部件中。切碎工具可以这样的方式布置或可布置,即,通过覆盖件中的开口引入的食物在穿过切碎工具之后被收集在容器中。这同样适用于描述食物配料的其他地方。开口特别地具有颈部的形式。它可由柱塞封闭,该柱塞被设计成将食物压入其中。
40.在一个实施方案中,当附件放置在食物制备容器上时,附件位于锁定装置的两个锁定元件之间。这同样适用于所放置的盖子。因此,能够特别可靠地锁定附件和盖子。
41.在一个实施方案中,锁定装置的锁定元件是能够绕其纵向轴线转动的臂,该臂能够从打开位置转动至锁定位置并返回。可转动臂能够优选地通过食物制备器具的电驱动器转动。臂可具有部分圆形的横截面。优选地,存在两个这样的臂。当附件放置在食物制备容器上时,附件然后位于两个臂之间。这同样适用于盖子。
42.传感器例如可以是光学传感器,其因此能够以光学方式确定附件或盖子是否被锁定。例如,传感器可包括光屏障。例如,光屏障被锁定中断。如果光屏障被中断,则传感器处于触发状态。例如,传感器可以是感应传感器。然后,可通过锁定来触发感应信号。随后,传感器处于触发状态。传感器可能是压力传感器。例如,压力可通过锁定施加到传感器。然后,传感器处于触发状态。在优选实施方案中,传感器是具有按钮或摇臂的电开关,当附件放置在食物制备容器上时,附件搁置在该按钮或摇臂上。
43.食物制备器具可包括用于在食物制备容器的底部区域中混合和/或切碎食物的可转动的混合工具。借助该混合工具,可特别快速且容易地混合和/或切碎食物的一种或多种配料。然而,与切碎工具相比,可以较少的控制执行切碎。
44.为了能够特别快速且容易地切碎,已经证明混合工具可以至少2000转/分钟或3000转/分钟、优选5000转/分钟转动。然而,较低的转动速度也可能足以快速且容易地切碎食物或食物配料。特别优选地,转动可在至少8000rpm下进行。低转动速度可用于仅混合食
物或食物配料,而不切碎食物或食物配料。
45.食物制备容器的盖子可以是双部件。双部件式盖子的第一盖部件可包括相对小的开口,该开口可用盖子的第二部件封闭。盖子的第二部件可手动移除,尤其是完全独立于锁定状态。然后提供小开口,即使当盖子的第一部件通过锁定装置牢固地连接到食物制备容器时,食物或食物配料也可通过该小开口填充到食物制备容器中。盖子的第二部件可包括容器形件,该容器形件然后可用作例如能够定量配料的量杯。盖子完全封闭,使得从外部不能接近食物制备容器。本发明意义上的盖子至少主要是封闭的。
46.食物制备器具优选包括控制单元,利用该控制单元可设定混合工具的转动速度。借助于控制单元,基本上可为混合工具设定至少5000转/分钟、优选至少8000转/分钟的转动速度。因此,混合工具可以至少5000转/分钟、优选至少8000转/分钟转动。特别优选地,10,000转/分钟和更高是可能的。上述转动速度确保了直接位于食物制备容器中的食物配料能够被快速且可靠地切碎。这种高转动速度对于切碎食物配料不是绝对必要的。然而,这种高转动速度有利于期望的切碎。因此,控制单元不一定必须能够设定至少5000转/分钟或至少8000转/分钟的转动速度。
47.食物制备器具,即食物制备器具的基部部件,可包括输入装置,例如滑块、旋钮和/或触敏显示器。可经由输入装置手动地设定期望的转动速度。借助于输入装置,例如可设定混合工具以5000转/分钟转动。在对应的输入之后,控制单元便控制转动速度,使得混合工具以5000转/分钟转动。也可通过输入装置选择其他转动速度,例如小于5000转/分钟或更高。输入装置可使得转动速度可连续地改变。输入装置可被设计成使得可设定不同的步长,并因此可设定不同的转动速度。输入装置可被设计成使得转速至少可有五个不同的步长。
48.控制单元可被设计成使得混合工具的转动速度被限制为25000转/分钟以下,以避免机械过载。
49.控制单元可被设计成使得其可例如根据数字存储的配方或根据借助于一个或多个传感器确定的一个或多个测量值,以自动化方式设定混合工具的转动速度。一个或多个传感器可以是食物制备器具的一部分,例如基部部件和/或食物制备容器的一部分。然而,它也可以是外部传感器例如温度计,该外部传感器可与食物制备器具、特别是与基部部件无线地交换数据。
50.混合工具可包括从轴突出的至少一个刀片。刀片包括至少一个切割边缘,食物配料通过该切割边缘可被特别好地切碎。切割边缘的横截面渐缩为一点。在与切割边缘相对的一侧上,刀片可具有钝的边缘。与切割边缘相比,食物配料不能用钝边缘切碎,或者至少切碎明显更差。特别地,在本发明的该实施方案中,混合工具的转动方向可被选择为可选地切碎或仅混合。
51.混合工具可包括多个这样的刀片。例如,可能有两个、三个或四个刀片,它们可从轴例如以均匀分布的方式径向地突出。在轴向方向上,刀片可至少部分地布置在不同高度处,以能够在不同高度处抓取食物制备容器中的食物或食物配料。基本上,所有刀片都靠近食物制备容器的基部布置。因此,刀片例如仅位于食物制备容器的下三分之一处。因此,混合工具的一个或多个刀片优选地布置在食物制备容器的底部附近,以能够抓取靠近底部的食物配料。
52.混合工具的轴可由食物制备器具的电动机驱动。控制单元然后可控制电动机的转
动速度,从而控制混合工具的转动速度。优选地,控制单元还可控制混合工具的转动方向。
53.混合工具的轴可穿过食物制备容器的底部,使得轴不会阻碍将食物填充到食物制备容器中。混合工具的轴也可从上方延伸到食物制备容器中。
54.混合工具可牢固地连接到食物制备容器。这不排除混合工具也可在没有工具的情况下从食物制备容器的底部拆卸,特别是为了能够从所有侧面容易地和彻底地清洁该混合工具。
55.食物制备容器是液密的。因此,液体可被填充到食物制备容器中,而液体不会流出食物制备容器。
56.混合工具的轴可包括在食物制备容器的底部下方的联接元件,该联接元件可联接到电动机的轴的联接元件。在联接状态下,电动机的转动运动然后可被传递到混合工具。通过提供这样的联接元件,可实现食物制备容器能够从食物制备器具的其余部分释放。因此,两个联接元件基本上在两个转动方向上以转动固定的方式将两个轴彼此连接。两个联接元件不必在轴向方向上连接两个轴。相反,这甚至是不利的,因为这样会阻碍食物制备容器的移除。
57.如果食物配料在附件的容器中,则配料不直接在食物制备容器中。容器中的配料不能被混合工具混合或切碎。
58.附件的容器可以像食物制备容器一样是液密的。然而,容器可以是例如筛形的。容器的功能可以是防止食物的切碎配料被混合工具进一步切碎。这可通过容器的筛形壁来实现。因此,容器的壁和/或底部不一定必须是液密的。然而,特别优选的是液密容器,因为它可靠地防止切碎的食物或已经切碎的配料无意地进入食物制备容器。
59.本发明还涉及一种用于插入根据本发明的食物制备器具的食物制备容器中的附件,该附件包括容器和用于该容器的覆盖件,其中当该覆盖件覆盖该容器时,至少一个台阶(或凸台)被插入该容器的手柄的开口中,并且该容器包括侧向突出的上边缘。
60.附件可包括切碎工具。
61.本发明还涉及一种用于使用根据本发明的食物制备器具来切碎食物的方法,其中附件被放置在食物制备器具的食物制备容器上,并且在被放置于其上之后被锁定,其中传感器由附件的部件通过锁定来触发。
62.下文还将参照附图更详细地解释本发明。除非另有说明,否则下文提到的特征可单独地或以多个的形式与要求保护的对象组合。所要求保护的范围不限于示例性实施方案。
附图说明:
63.图1:具有切碎帽的柱塞的挤压装置;
64.图2:切碎帽的覆盖件;
65.图3:切碎帽的切割盘;
66.图4:切碎帽的容器;
67.图5:切碎帽的轴;
68.图6:具有盖部件的食物处理机;
69.图7:具有食物制备容器内的内部视图的食物处理机;
70.图8:具有切碎帽的食物处理机。
71.图1至图5示出了切碎帽(切碎附件)的所有五个部件的示意图。切碎帽是用于食物制备器具,即用于食物处理机的附件。
72.图1示出了具有两个柱塞1的挤压装置。两个柱塞1在它们的上侧通过圆周边缘2牢固地彼此连接。边缘2侧向突出。每个柱塞1也可被设计成容器,例如量杯。在下侧,两个柱塞1可具有用于固定食物配料或食物的突出的突出部3。如图1所示,在两个柱塞1之间可存在间隙4。
73.在图2中,示出了切碎帽的覆盖件5。覆盖件5包括两个斜槽6,其由具有内隔板的向上突出的颈部形成。斜槽6与两个柱塞1相适应,使得柱塞1可插入两个斜槽6中。侧向突出的边缘2防止柱塞1通过斜槽6落下。借助于柱塞1,食物或食物配料可通过斜槽6被压靠在图3所示的切碎工具14上。
74.斜槽6和颈部在它们的下侧被连接到弯曲帽7在帽7的边缘区域中。在帽7的下侧,部分圆形的台阶(凸台)8设置在两个相对侧上。两个部分圆形的台阶8从帽7侧向向下突出。
75.心轴9从帽7的大致中心处从帽7向上突出。心轴9保持杆10相对于帽7向下突出。出于稳定性的原因,心轴9的外径大于杆10的最大外径。杆10在其自由端可具有圆柱形加宽部11,该加宽部具有锥形自由端12。台阶8的下侧可被设计成钩形13。
76.在图3中示出了切碎工具,即具有刀或刀片15和另外的切割装置16的切割盘14。借助于刀15和另外的切割装置16,可以通过围绕其轴17转动切割盘14转动来切碎食物或食物配料。通过切碎,切碎的成分穿过切割盘14。轴17是轴形、至少部分中空的,并且在其端部具有环形联接元件18和19。杆10可通过上联接元件18插入轴17的轴中。在切碎帽的组装状态下,这在操作期间稳定了轴17的位置。
77.图4示出了切碎帽的容器20。在容器20的上侧有两个相对的手柄21。两个手柄21从容器20的上边缘部分22首先向上、然后向外延伸到侧面。因此,每个手柄21形成开口23。台阶8可插入开口23中。然后,台阶8的下侧位于边缘部分22上。手柄21的朝上的脊24防止覆盖件5与帽7一起侧向滑动,并有助于定位覆盖件5。然后,下侧的钩形13可以接合在边缘部分22周围,并因此起到补充作用以相对于容器20定位覆盖件5并防止侧向滑动(也参见图8)。
78.容器20的底部25具有通向中空轴的漏斗形开口26。
79.在图5中,示出了轴27,该轴可插入通过漏斗形开口26和邻接的中空轴。轴27的上端具有联接元件28,其可插入切割盘13的下联接元件19中。联接元件28的外轮廓与联接元件19的内轮廓相对应。这确保了当联接元件28插入联接元件19中时,两个联接元件以转动固定的方式彼此连接。
80.轴27具有下联接元件29。下联接元件29可放置在食物处理机的食物制备容器内的混合工具上,使得联接元件29以转动固定的方式连接到混合工具。当轴27以转动固定的方式连接到切割盘13时,混合工具的转动然后导致切割盘13也转动。
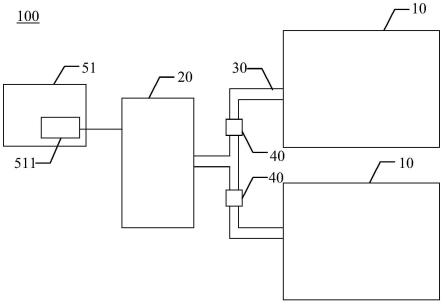
81.图6示出了具有食物制备容器31的此类食物处理机30。盖部件32放置在食物制备容器31上。用于食物制备容器31的盖部件32由臂状锁定元件(即臂33)锁定。盖部件32位于两个臂33之间。臂33可以以机动的方式绕其纵向轴线转动,以在打开位置和锁定位置之间往复运动。盖部件32已被压下,从而触发传感器,即电开关的摇臂34。臂状锁定元件33和摇臂34附接到食物处理机30的基部部件35。食物制备容器31插入基部部件35中,并且可从基
部部件35移开。为了能够移开食物制备容器31,其包括手柄36。基部部件35包括显示器37和用于操作的转动开关38。盖部件32包括位于中心的开口39,该开口可用容器状封闭件封闭。由于触发的摇臂34,食物处理机30的控制单元已接收到盖部件被正确放置和锁定的信息。然而,食物处理机30的控制单元不能获得关于未示出的容器状封闭件的状态的信息。
82.当臂式锁定元件33转动至其打开位置时,这使得摇臂34通过弹簧力向上移动至其非触发位置。摇臂34的这种移动相应地升高了盖部件32。然后,盖部件32放置在摇臂34上,但没有锁定。
83.图7示出了图6的食物处理机30。食物制备容器31的区域被显示为切开以露出内部。可转动的混合工具41位于食物制备容器31的基部40处。混合工具41由延伸穿过食物制备容器31的基部40的轴43驱动。轴43通过下联接元件插入基部部件35的联接元件42中,并且由此以转动固定的方式连接。联接元件42连接到位于基部部件35中的电动机的轴。混合工具41可通过基部部件35中的电动机转动。
84.当图7的左上方所示的锁定元件33逆时针转动,并且右上方所示的锁定元件33顺时针转动时,锁定被释放,并且盖部件32可从食物制备容器31移开。
85.图5所示的联接元件29可放置在轴43上,使得在混合工具41和联接元件29之间建立转动固定连接。
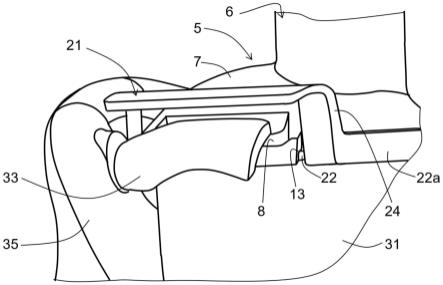
86.代替盖部件32,切碎帽可放置在食物制备容器31上。这在图8中被部分示出处于锁定位置。锁定元件33以这样的方式搁置在覆盖件5的台阶8上,使得覆盖件5因此不再能够从食物制备容器31释放。覆盖件5搁置在具有手柄21的容器的上边缘22上。因此,具有手柄21的容器不能从食物制备容器31中移开。摇臂34由具有手柄21的容器的侧向突出的边缘部分22a操作。
87.事实上,覆盖件5也可在没有包括手柄21的容器的情况下被锁定。然而,在这种情况下,摇臂34没有被操作,因此没有被触发。食物处理机的控制装置实际上被配置为使得其随后识别锁定状态。同时,控制装置具有摇臂34由于没有带有手柄21的容器而未被触发的信息。因此,控制装置检测故障状态。
88.锁定元件33对锁定状态的检测可经由压力传感器来完成,或者例如经由对用于锁定的电动机的电流消耗的评估来完成,当锁定发生时,该电动机必须施加增大的力。
89.该示例表明,可以毫不费力地监控多部件附件的至少两个部件。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。