1.本说明书公开的技术涉及一种搬运车。
背景技术:
2.专利文献1公开了一种搬运车。所述搬运车具备:驱动轮;马达,其使所述驱动轮旋转;马达驱动电路,其构成为对所述马达进行驱动;控制单元,其以所述搬运车的行进速度为上限行进速度以下的方式借助所述马达驱动电路而对所述马达进行控制;以及操作部件,其设置于所述搬运车,接受用户进行的操作。所述搬运车可以以手动模式和自动模式进行动作,该手动模式为:在所述操作部件被接通的情况下,所述马达进行驱动,在所述操作部件被断开的情况下,所述马达停止的模式;该自动模式为:不论所述操作部件是接通还是断开,所述马达都进行驱动的模式。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2003-038695号公报
技术实现要素:
6.在搬运车以自动模式进行动作之时,与搬运车以手动模式进行动作的情况相比,需要更高度的安全性。在本说明书中,提供一种:能够更加提高搬运车以自动模式进行动作之时的安全性的技术。
7.本说明书公开的搬运车可以具备:驱动轮;马达,其驱使所述驱动轮旋转;马达驱动电路,其构成为对所述马达进行控制;马达控制单元,其构成为借助所述马达驱动电路而对所述马达进行控制,以使得所述搬运车的行进速度为上限行进速度以下;以及操作部件,其设置于所述搬运车,接受由用户进行的操作。所述搬运车可以以手动模式和自动模式进行动作,该手动模式为:在所述操作部件被接通的情况下,所述马达进行驱动,在所述操作部件被断开的情况下,所述马达停止的模式;该自动模式为:不论所述操作部件是接通还是断开,所述马达都进行驱动的模式。所述自动模式下的所述上限行进速度可以设定为:低于所述手动模式下的所述上限行进速度。
8.根据上述的构成,搬运车以自动模式进行动作之时的上限行进速度被设定为低于搬运车以手动模式进行动作之时的上限行进速度,因此,能够更加提高搬运车以自动模式进行动作之时的安全性。
附图说明
9.图1是从右前上方观察到的实施例所涉及的搬运车2的立体图。
10.图2是从右前下方观察到的实施例所涉及的车基台单元4的立体图。
11.图3是从右后上方观察到的实施例所涉及的车基台单元4的立体图。
12.图4是从右前上方观察到的实施例所涉及的车基台单元4的右前过载监测机构
302a的立体图。
13.图5是实施例所涉及的车基台单元4上的、过载监测传感器320a被断开的状态下的右前过载监测机构302a的纵向剖视图。
14.图6是实施例所涉及的车基台单元4上的、过载监测传感器320a被接通的状态下的右前过载监测机构302a的纵向剖视图。
15.图7是变形例所涉及的车基台单元4上的、过载监测传感器380被断开的状态下的过载监测机构364的纵向剖视图。
16.图8是变形例所涉及的车基台单元4上的、过载监测传感器380被接通的状态下的过载监测机构364的纵向剖视图。
17.图9是在沿着前后方向以及上下方向的截面处观察到的实施例所涉及的车基台单元4的剖视图。
18.图10是在沿着左右方向以及上下方向的截面处观察到的实施例所涉及的车基台单元4的剖视图。
19.图11是从右后上方观察到的实施例所涉及的车把手单元8的立体图。
20.图12是从右前下方观察到的实施例所涉及的车把手单元8的下部的立体图。
21.图13是从右前下方观察到的实施例所涉及的车把手单元8的支撑管78、夹持部件80、固定部件82、车把手轴84、以及转动角度传感器88的立体图。
22.图14是从左后上方观察到的实施例所涉及的车把手单元8的可动凸轮部件90的立体图。
23.图15是从左前上方观察到的实施例所涉及的车把手单元8的固定凸轮部件92的立体图。
24.图16是在沿着前后方向以及左右方向的截面处观察到的实施例所涉及的车把手单元8上的、进行了向右方转向的操作的状态下的车把手单元8的下部的剖视图。
25.图17是从右前下方观察到的实施例所涉及的车把手单元8上的、进行了向右方转向的操作的状态下的车把手单元8的下部的立体图。
26.图18是从左前上方观察到的实施例所涉及的转向单元10以及前轮单元12的立体图。
27.图19是从左前上方观察到的实施例所涉及的转向单元10的立体图。
28.图20是在沿着前后方向以及左右方向的截面处观察到的实施例所涉及的转向单元10的剖视图。
29.图21是从左后下方观察到的实施例所涉及的转向单元10的主轴178、凸轮180、可动齿轮182以及螺旋弹簧184的分解立体图。
30.图22是在沿着前后方向以及上下方向的截面处观察到的实施例所涉及的转向单元10的剖视图。
31.图23是从左前上方观察到的实施例所涉及的右前轮单元12a的立体图。
32.图24是在沿着左右方向以及上下方向的断面处观察到的实施例所涉及的右前轮单元12a的剖视图。
33.图25是从右后上方观察到的实施例所涉及的后轮单元14的立体图。
34.图26是从左后上方观察到的实施例所涉及的右后轮单元14a的立体图。
35.图27是从右前上方观察到的实施例所涉及的保险杠单元16的立体图。
36.图28是在沿着前后方向以及左右方向的截面处观察到的实施例所涉及的保险杠单元16的直动轴承522的附近的剖视图。
37.图29是从左后上方观察到的实施例所涉及的保险杠单元16的立体剖视图。
38.图30是模拟性地表示实施例所涉及的搬运车2的电路构成的图。
39.图31是模拟性地表示实施例所涉及的切换电路436的电路构成的图。
40.图32是模拟性地表示实施例所涉及的切断电路438、马达驱动器454、456、458、460、制动电路468、470、472、474的电路构成的图。
41.图33是模拟性地表示实施例所涉及的切断电路440、电磁制动驱动器464、466的电路构成的图。
42.图34是模拟性地表示实施例所涉及的切断电路442、马达驱动器462的电路构成的图。
43.图35是实施例所涉及的搬运车2的主mcu434所执行的处理的流程图。
44.图36是实施例所涉及的搬运车2的主mcu434以手动模式所执行的处理的流程图。
45.图37是实施例所涉及的搬运车2的主mcu434以自动模式所执行的处理的流程图。
46.图38是实施例所涉及的搬运车2的马达mcu444、446所执行的处理的流程图。
47.图39是实施例所涉及的搬运车2的马达mcu444、446所执行的处理的流程图。
48.图40是实施例所涉及的搬运车2的马达mcu448、450所执行的处理的流程图。
49.图41是实施例所涉及的搬运车2的马达mcu448、450所执行的处理的流程图。
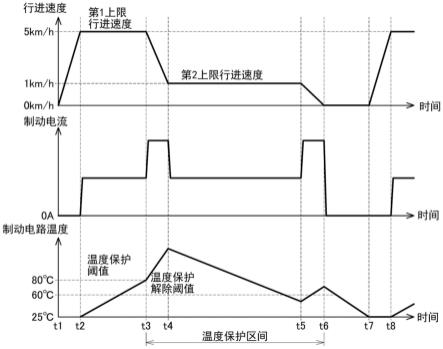
50.图42是表示实施例所涉及的搬运车2以手动模式而行驶在平地以及下坡上的情况下的行进速度、制动电流、制动电路温度的经时变化的例子的图表。
51.图43是实施例所涉及的搬运车2的马达mcu452所执行的处理的流程图。
52.附图标记说明
53.2:搬运车,4:车基台单元,6:货架单元,8:车把手单元,10:转向单元,11:悬架机构,12:前轮单元,12a:右前轮单元,12b:左前轮单元,14:后轮单元,14a:右后轮单元,14b:左后轮单元,16:保险杠单元,20:基座板,20a:贯通孔,20b:贯通孔,20c:贯通孔,20d:贯通孔,22:前侧支撑部件,22a:右上侧连结部,22b:右下侧连结部,22c:左上侧连结部,22d:左下侧连结部,24:后侧支撑部件,26:右下侧框架,28:左下侧框架,30:右上侧框架,32:左上侧框架,34:蓄电池箱,36:下侧控制器壳体,38:蓄电池包,40:蓄电池安装部,42:蓄电池盖,44:主控制电路基板,44a:电路基板壳体,46:驱动控制电路基板,46a:电路基板壳体,48:驱动控制电路基板,48a:电路基板壳体,50:电气制动电路基板,50a:散热壳体,50b:电路基板收纳部,50c:散热片,50d:冷却风扇,52:电气制动电路基板,52a:散热壳体,52b:电路基板收纳部,52c:散热片,52d:冷却风扇,54:电气制动电路基板,54a:散热壳体,54b:电路基板收纳部,54c:散热片,54d:冷却风扇,56:电气制动电路基板,56a:散热壳体,56b:电路基板收纳部,56c:散热片,56d:冷却风扇,58:散热板,60:主框架,62:右侧防护件,64:左侧防护件,66:前侧防护件,70:开关盒,72:右侧车把手,72a:支撑部,72b:车把手部,72c:右侧把持部,73:转向车把手,74:左侧车把手,74a:支撑部,74b:车把手部,74c:左侧把持部,76:车把手机械臂,78:支撑管,80:夹持部件,80a:夹持片,80b:夹持片,80c:紧固部,82:固定部件,84:车把手轴,84a:引导突起,86:基座部件,88:转动角度传感器,90:可动凸轮部件,90a:凸
轮凸部,90b:凸轮凸部,90c:第1凸轮面,90d:第1凸轮面,90e:第2凸轮面,90f:第2凸轮面,90g:引导槽,90h:弹簧承接部,92:固定凸轮部件,92a:圆筒部,92b:凸缘部,92c:凸轮凹部,92d:凸轮凹部,92e:第1凸轮面,92f:第1凸轮面,92g:第2凸轮面,92h:第2凸轮面,92i:止挡部,92j:止挡部,94:螺旋弹簧,96:主电源开关,98:模式切换开关,98a:接地端子,98b:手动模式端子,98c:自动模式端子,100:触发器开关,100a:接地端子,100b:触发器端子,100c:可变电阻,102:行进方向切换开关,102a:接地端子,102b:行进方向端子,104:速度切换开关,106:鸣笛开关,108:车把手单元,126:车把手轴,136:螺旋弹簧,160:马达外壳,162:马达支撑部件,164:齿轮外壳,166:转向角传感器,168:转向轴,168a:齿轮部,169:传递机构,170:转向板,172:右侧连接杆,174:左侧连接杆,176:转向马达,176a:马达轴,176b:齿轮部,178:主轴,178a:弹簧承接部,180:凸轮,180a:凸轮沟,181:转矩限制器,182:可动齿轮,182a:齿轮部,182b:凹部,182c:凸轮突起,184:螺旋弹簧,186:圆筒蜗杆,188:蜗轮,190:中继轴,190a:齿轮部,192:右前轮,192a:右前轮车轴,194:右侧齿轮外壳,195:右侧保持部件,196:右侧马达外壳,198:右侧中枢销,200:右侧套筒,202:右上侧臂,204:右下侧臂,206:右侧缓冲部件,206a:减震器,206b:螺旋弹簧,208:右侧转向板,212:左前轮,212a:左侧车轴,214:左侧齿轮外壳,215:左侧保持部件,216:左侧马达外壳,218:左侧中枢销,220:左侧套筒,222:左上侧臂,224:左下侧臂,226:左侧缓冲部件,226a:减震器,226b:螺旋弹簧,228:左侧转向板,232:右前轮马达,232a:右前轮马达轴,234:行星齿轮机构,242:左前轮马达,242a:左前轮马达轴,244:行星齿轮机构,252:右后轮,254:右侧齿轮外壳,254a:连结部,256:右侧马达外壳,258:右侧制动器外壳,260:右侧离合器杆,264:右侧缓冲部件,264a:减震器,264b:螺旋弹簧,272:左后轮,274:左侧齿轮外壳,274a:连结部,276:左侧马达外壳,278:左侧制动器外壳,280:左侧离合器杆,284:左侧缓冲部件,284a:减震器,284b:螺旋弹簧,302:过载监测机构,302a:右前过载监测机构,302b:左前过载监测机构,302c:右后过载监测机构,302d:左后过载监测机构,304:紧急停止开关壳体,306:上侧控制器壳体,308:紧急停止开关,308a:接地端子,308b:紧急停止端子,312:上侧控制器壳体,312a:柱状部件,312b:柱状部件,312c:柱状部件,312d:柱状部件,314a:螺旋弹簧,314b:螺旋弹簧,314c:螺旋弹簧,314d:螺旋弹簧,316a:监测板,316b:监测板,316c:监测板,316d:监测板,318a:基座部件,318b:基座部件,318c:基座部件,318d:基座部件,320a:过载监测传感器,320b:过载监测传感器,320c:过载监测传感器,320d:过载监测传感器,322a:圆柱部,322b:圆柱部,322c:圆柱部,322d:圆柱部,324a:凸缘部,324b:凸缘部,324c:凸缘部,324d:凸缘部,326a:上侧小径部,326b:上侧小径部,326c:上侧小径部,326d:上侧小径部,328a:下侧小径部,328b:下侧小径部,328c:下侧小径部,328d:下侧小径部,330a:贯通孔,330b:贯通孔,330c:贯通孔,330d:贯通孔,332a:螺纹孔,332b:螺纹孔,332c:螺纹孔,332d:螺纹孔,334a:垫圈,334b:垫圈,334c:垫圈,334d:垫圈,336a:螺栓,336b:螺栓,336c:螺栓,336d:螺栓,338a:贯通孔,338b:贯通孔,338c:贯通孔,338d:贯通孔,340a:垫圈,340b:垫圈,340c:垫圈,340d:垫圈,342a:螺纹孔,342b:螺纹孔,342c:螺纹孔,342d:螺纹孔,344a:螺栓,344b:螺栓,344c:螺栓,344d:螺栓,346a:支撑部,346b:支撑部,346c:支撑部,346d:支撑部,348a:监测部,348b:监测部,348c:监测部,348d:监测部,350a:卡合部,350b:卡合部,350c:卡合部,350d:卡合部,352a:螺母部,352b:螺母部,352c:螺母部,352d:螺母部,354a:引导部,354b:引导部,354c:引导部,354d:引导部,356a:传感器保持部,356b:传感器保持
部,356c:传感器保持部,356d:传感器保持部,358a:螺栓,358b:螺栓,358c:螺栓,358d:螺栓,360a:发光元件,360b:发光元件,360c:发光元件,360d:发光元件,362a:受光元件,362b:受光元件,362c:受光元件,362d:受光元件,364:过载监测机构,366:支撑部件,368:柱状部件,370:螺旋弹簧,372:监测板,374:上侧外壳,376:传感器保持部件,378:下侧外壳,380:过载监测传感器,382:盖帽,384:圆柱部,386:上侧小径部,388:下侧小径部,390:贯通孔,392:螺纹孔,394:垫圈,396:垫圈,398:螺栓,400:收纳室,402:底壁,404:贯通孔,406:密封部件,408:缓冲件,410:螺纹孔,412:螺栓,414:支撑部,416:监测部,418:引导部,420:发光元件,422:受光元件,424:收纳空间,426:自动运转控制电路基板,428:无线i/f,430:自动运转mcu,432:控制电源电路,434:主mcu,436:切换电路,438:切断电路,438a:开关元件,438b:驱动器ic,438c:and门,440:切断电路,440a:开关元件,440b:驱动器ic,440c:and门,442:切断电路,442a:开关元件,442b:驱动器ic,442c:and门,446:马达mcu,448:马达mcu,450:马达mcu,452:马达mcu,454:马达驱动器,454a:第1开关元件,454b:第2开关元件,454c:第3开关元件,454d:第4开关元件,454e:第5开关元件,454f:第6开关元件,454g:第1二极管,454h:第2二极管,454i:第3二极管,456:马达驱动器,456a:第1开关元件,456b:第2开关元件,456c:第3开关元件,456d:第4开关元件,456e:第5开关元件,456f:第6开关元件,456g:第1二极管,456h:第2二极管,456i:第3二极管,458:马达驱动器,458a:第1开关元件,458b:第2开关元件,458c:第3开关元件,458d:第4开关元件,458e:第5开关元件,458f:第6开关元件,458g:第1二极管,458h:第2二极管,458i:第3二极管,460:马达驱动器,460a:第1开关元件,460b:第2开关元件,460c:第3开关元件,460d:第4开关元件,460e:第5开关元件,460f:第6开关元件,460g:第1二极管,460h:第2二极管,460i:第3二极管,462:马达驱动器,462a:第1开关元件,462b:第2开关元件,462c:第3开关元件,462d:第4开关元件,462e:第5开关元件,462f:第6开关元件,464:电磁制动驱动器,464a:开关元件,464b:二极管,466:电磁制动驱动器,466a:开关元件,466b:二极管,468:制动电路,468a:开关元件,468b:电阻,468c:放大器,468d:运算放大器,468e:热敏电阻,470:制动电路,470a:开关元件,470b:电阻,470c:放大器,470d:运算放大器,470e:热敏电阻,472:制动电路,472a:开关元件,472b:电阻,472c:放大器,472d:运算放大器,472e:热敏电阻,474:制动电路,474b:电阻,474c:放大器,474d:运算放大器,474e:热敏电阻,476:led,478:蜂鸣器,480:霍尔传感器,482:霍尔传感器,484:霍尔传感器,486:右后轮马达,488:霍尔传感器,490:右后轮电磁制动器,492:左后轮马达,494:霍尔传感器,496:左后轮电磁制动器,500:基座部件,502:外壳,502a:收纳部,502b:右侧支撑部,502c:左侧支撑部,504:右侧前照灯,506:左侧前照灯,508:保险杠框架,510:保险杠支撑部件,512:保险杠支撑部件,514:直动管,514a:长孔,514b:长孔,516:直动管,516a:长孔,516b:长孔,518:螺旋弹簧,520:螺旋弹簧,522:直动轴承,524:直动轴承,526:抵接板,526a:抵接部,528:抵接板,528a:抵接部,530:碰撞监测开关,530a:接地端子,530b:碰撞监测端子,532:碰撞监测开关,532a:接地端子,532b:碰撞监测端子,534a:螺栓,534b:螺栓,536a:螺母,536b:螺母,538a:螺栓,538b:螺栓,540a:螺母,540b:螺母,542:消除电路,542a:晶体管,542b:电阻,542c:电阻,542d:电阻,544:消除电路,544a:晶体管,544b:电阻,544c:电阻,544d:电阻,546:消除电路,546a:晶体管,546b:电阻,546c:电阻,546d:电阻,548:延迟电路,548a:二极管,548b:电阻,548c:电容器,548d:缓冲门,550:and门,552:and门,554:or门,556:or门,558:not门,560:not门,562:not门,564:
not门,566:not门,568:电阻,570:电阻,572:电阻,574:电阻,576:电阻,578:电阻。
具体实施方式
54.下面,参照附图,详细说明本发明的代表性的且非限定的具体例。该详细说明只是单纯地想要将用于实施本发明优选例的详细内容向本领域技术人员展示而已,并非意欲限定本发明的范围。另外,为了提供进一步改善的搬运车、其制造方法及使用方法,以下公开的追加的特征以及发明可以不同于其他的特征或发明,或者也可以与之一起使用。
55.另外,以下的详细说明中所公开的特征或工序的组合在最广义的意思下并非是实施本发明之时必要的构件,只是为了用于说明本发明的代表性的具体例所描述的内容。此外,上述及下述的代表性的具体例的各种各样的特征、以及、独立权项及从属权项所描述的各种各样的特征并不是:在提供本发明的追加的且有用的实施方式时,必须如在此所描述的具体例那样,或者必须如所列举的顺序那样进行组合的内容。
56.本说明书以及/或者权利要求书所描述的所有的特征还具有下述的意图,即:在实施例以及/或者权项所描述的特征的构成之外,另外地作为针对于申请最初的公开以及要求保护的特定事项进行的限定,分别、且相互地独立进行公开。此外,所有的数值范围以及群组或者基团所相关的描述还具有下述的意图,即:作为针对于申请最初的公开以及要求保护的特定事项进行的限定,公开它们的中间构成。
57.在1个或其以上的实施方式中,搬运车可以具备:驱动轮;马达,其驱使所述驱动轮旋转;马达驱动电路,其构成为对所述马达进行驱动;控制单元,其构成为借助所述马达驱动电路而对所述马达进行控制,以使得所述搬运车的行进速度为上限行进速度以下;以及操作部件,其设置于所述搬运车,接受由用户进行的操作。所述搬运车可以以手动模式和自动模式进行动作,该手动模式为:在所述操作部件被接通的情况下,所述马达进行驱动,在所述操作部件被断开的情况下,所述马达停止的模式;该自动模式为:不论所述操作部件是接通还是断开,所述马达都进行驱动的模式。所述自动模式下的所述上限行进速度可以被设定为:低于所述手动模式下的所述上限行进速度。
58.根据上述的构成,由于搬运车以自动模式进行动作之时的上限行进速度被设定为:低于搬运车以手动模式进行动作之时的上限行进速度,因此,能够更加提高搬运车以自动模式进行动作之时的安全性。
59.在1个或其以上的实施方式中,所述搬运车可以还具备:对货物的过载进行检测的过载监测传感器。在所述自动模式下,当通过所述过载监测传感器监测到过载时,可以禁止所述搬运车的行驶。在所述手动模式下,即便通过所述过载监测传感器监测到了过载,也可以允许所述搬运车的行驶。
60.根据上述的构成,由于在手动模式下,即便监测到过载,也允许搬运车的行驶,而在自动模式下,当监测到过载时,就禁止搬运车的行驶,因此,能够更加提高搬运车以自动模式进行动作之时的安全性。
61.在1个或其以上的实施方式中,所述搬运车可以还具备:对来自前方的与所述搬运车的碰撞进行监测的碰撞监测传感器。所述自动模式下,在所述搬运车向后方移动时,当通过所述碰撞监测传感器监测到了碰撞时,可以禁止所述搬运车的行驶。所述手动模式下,在所述搬运车向后方移动时,即便通过所述碰撞监测传感器监测到了碰撞,也可以允许所述
搬运车的行驶。
62.根据上述的构成,手动模式下,在搬运车向后方移动时,即便监测到了来自搬运车前方的碰撞的情况下,也允许搬运车的行驶,而在自动模式下,在搬运车向后方移动时,监测到了来自搬运车前方的碰撞的情况下,禁止搬运车的行驶,因此,能够更加提高搬运车以自动模式进行动作之时的安全性。
63.在1个或其以上的实施方式中,所述搬运车可以还具备:对来自后方的所述搬运车的碰撞进行监测的碰撞监测传感器。所述自动模式下,在所述搬运车向前方移动时,当通过所述碰撞监测传感器监测到了碰撞时,可以禁止所述搬运车的行驶,而在所述手动模式下,在所述搬运车向前方移动时,即便通过所述碰撞监测传感器监测到了碰撞,也可以允许所述搬运车的行驶。
64.根据上述的构成,手动模式下,在搬运车向前方移动时,即便监测到了来自搬运车后方的碰撞的情况下,也允许搬运车的行驶,而在自动模式下,在搬运车向前方移动时,监测到了来自搬运车后方的碰撞的情况下,禁止搬运车的行驶,因此,能够更加提高搬运车以自动模式进行动作之时的安全性。
65.在1个或其以上的实施方式中,所述搬运车可以在所述自动模式下,能够执行:跟踪用户所携带的信标器而进行移动的追踪运转、以及根据来自用户所操作的遥控器的指示而进行移动的遥控运转。
66.根据上述的构成,能够更加提高搬运车在自动模式下执行追踪运转、以及遥控运转之时的安全性。
67.(实施例)
68.图1所示的搬运车2具备:车基台单元4、货架单元6、车把手单元8、转向单元10、前轮单元12、后轮单元14、以及保险杠单元16。搬运车2用于搬运载放在货架单元6上的货物。搬运车2具备:搭载于车基台单元4的接收机(未图示)。搬运车2能够以手动模式、自动模式或者停车模式的任何一种进行动作。在手动模式下,在站立在车把手单元8的后方的用户把持住车把手单元8的状态下,搬运车2根据用户进行的操作而向前方或者后方进行移动。在自动模式下,搬运车2进行:跟踪站在车基台单元4的前方的用户所携带的信标器(未图示)而进行移动的追踪运转、以及根据来自用户所操作的遥控器(未图示)的指示而进行移动的遥控运转。这种情况下,搬运车2通过接收机而接收来自信标器或遥控器的电波。在停车模式下,搬运车2对后轮单元14进行锁止而持续在该场地停止。
69.(车基台单元4)
70.如图2、图3所示,车基台单元4具备:基座板20、前侧支撑部件22、后侧支撑部件24、右下侧框架26、左下侧框架28、右上侧框架30、左上侧框架32、蓄电池箱34、过载监测机构302、紧急停止开关壳体304、上侧控制器壳体306、以及下侧控制器壳体36。过载监测机构302具备:右前过载监测机构302a、左前过载监测机构302b、右后过载监测机构302c、以及左后过载监测机构302d。
71.如图2所示,基座板20为铝合金制的部件,具有:长边方向沿着前后方向、短边方向沿着左右方向的大致矩形的平板形状。紧急停止开关壳体304为树脂制的部件,在基座板20的前端,被固定于基座板20的下表面。在紧急停止开关壳体304的前表面设置有:能够供用户进行按压操作的紧急停止开关308。紧急停止开关308在通常情况下断开,当被用户进行
按压操作时接通。紧急停止开关308与后面叙述的主控制电路基板44电连接。另外,紧急停止开关壳体304也可以设置在基座板20的后端、右端或者左端,与之相对应地,紧急停止开关308也可以设置在紧急停止开关壳体304的后表面、右表面或者左表面。
72.前侧支撑部件22为钢制的部件,在基座板20的前部,借助右前过载监测机构302a以及左前过载监测机构302b而被安装在基座板20的下表面。如图3所示,后侧支撑部件24为钢制的部件,在基座板20的后部,借助右后过载监测机构302c以及左后过载监测机构302d而被安装在基座板20的下表面。右下侧框架26和左下侧框架28均为钢制的部件,在比基座板20靠下方的位置沿着前后方向延伸。右下侧框架26的前部和左下侧框架28的前部分别固定于前侧支撑部件22。右下侧框架26的后部和左下侧框架28的后部分别固定于后侧支撑部件24。
73.右前过载监测机构302a、左前过载监测机构302b、右后过载监测机构302c、以及左后过载监测机构302d均具备:同样的构成。如图4所示,右前过载监测机构302a、左前过载监测机构302b、右后过载监测机构302c、以及左后过载监测机构302d均具备:柱状部件312a、312b、312c、312d、螺旋弹簧314a、314b、314c、314d、监测板316a、316b、316c、316d、基座部件318a、318b、318c、318d、以及过载监测传感器320a、320b、320c、320d。如图5所示,柱状部件312a、312b、312c、312d具备:圆柱部322a、322b、322c、322d、凸缘部324a、324b、324c、324d、上侧小径部326a、326b、326c、326d、以及下侧小径部328a、328b、328c、328d。圆柱部322a、322b、322c、322d具有:轴向沿着上下方向的大致圆柱形状。凸缘部324a、324b、324c、324d配置于圆柱部322a、322b、322c、322d的上方,且具有:比圆柱部322a、322b、322c、322d向径向外侧突出的形状。上侧小径部326a、326b、326c、326d配置于凸缘部324a、324b、324c、324d的上方,且具有:直径比圆柱部322a、322b、322c、322d小的大致圆柱形状。下侧小径部328a、328b、328c、328d配置于圆柱部322a、322b、322c、322d的下方,且具有:直径比圆柱部322a、322b、322c、322d小的大致圆柱形状。
74.上侧小径部326a、326b、326c、326d从下方插入于:形成在基座板20的贯通孔330a、330b、330c、330d。在柱状部件312a、312b、312c、312d的上端形成有螺纹孔332a、332b、332c、332d。螺栓336a、336b、336c、336d经由垫圈334a、334b、334c、334d而螺合于螺纹孔332a、332b、332c、332d。在螺栓336a、336b、336c、336d螺合于螺纹孔332a、332b、332c、332d的状态下,基座板20被垫圈334a、334b、334c、334d和凸缘部324a、324b、324c、324d夹持。由于贯通孔20a、20b、20c、20d的内径比上侧小径部326a、326b、326c、326d的外径大一点点,因此,柱状部件312a、312b、312c、312d相对于基座板20能够稍微倾动。
75.下侧小径部328a、328b、328c、328d从上方插入于:形成在前侧支撑部件22(或者后侧支撑部件24)的贯通孔338a、338b、338c、338d。由于贯通孔338a、338b、338c、338d的内径比下侧小径部328a、328b、328c、328d的外径大一点点,因此,柱状部件312a、312b、312c、312d相对于前侧支撑部件22(或者后侧支撑部件24)能够稍微倾动。在柱状部件312a、312b、312c、312d安装有螺旋弹簧314a、314b、314c、314d。螺旋弹簧314a、314b、314c、314d的上端抵接于垫圈340a、340b、340c、340d的下表面。垫圈340a、340b、340c、340d的上表面抵接于凸缘部324a、324b、324c、324d的下表面。螺旋弹簧314a、314b、314c、314d的下端抵接于前侧支撑部件22(或者后侧支撑部件24)的上表面。螺旋弹簧314a、314b、314c、314d将柱状部件312a、312b、312c、312d相对于前侧支撑部件22(或者后侧支撑部件24)向上方施力。
76.在柱状部件312a、312b、312c、312d的下端形成有螺纹孔342a、342b、342c、342d。螺栓344a、344b、344c、344d经由监测板316a、316b、316c、316d而螺合于螺纹孔342a、342b、342c、342d。监测板316a、316b、316c、316d具备:支撑部346a、346b、346c、346d,其具有沿着前后方向以及左右方向的大致平板形状;以及监测部348a、348b、348c、348d,其从支撑部346a、346b、346c、346d的端部向下方弯曲,且具有沿着前后方向以及上下方向的大致平板形状。
77.基座部件318a、318b、318c、318d具备:卡合部350a、350b、350c、350d、螺母部352a、352b、352c、352d、引导部354a、354b、354c、354d、以及传感器保持部356a、356b、356c、356d。卡合部350a、350b、350c、350d能够与前侧支撑部件22(或者后侧支撑部件24)卡合。螺栓358a、358b、358c、358d螺合于螺母部352a、352b、352c、352d。螺栓358a、358b、358c、358d的下端贯通螺母部352a、352b、352c、352d而抵接于前侧支撑部件22(或者后侧支撑部件24)的上表面。在使卡合部350a、350b、350c、350d卡合于前侧支撑部件22(或者后侧支撑部件24)的状态下,将螺栓358a、358b、358c、358d相对于螺母部352a、352b、352c、352d进行紧固,由此,基座部件318a、318b、318c、318d被固定于前侧支撑部件22(或者后侧支撑部件24)。引导部354a、354b、354c、354d具有:对监测板316a、316b、316c、316d的上下方向的移动进行引导的形状。在传感器保持部356a、356b、356c、356d安装有过载监测传感器320a、320b、320c、320d。过载监测传感器320a、320b、320c、320d相对于传感器保持部356a、356b、356c、356d而言的上下方向的安装位置能够进行调整。
78.本实施例的过载监测传感器320a、320b、320c、320d为:所谓的光电耦合器件。过载监测传感器320a、320b、320c、320d具备:相互地对置配置的发光元件360a、360b、360c、360d、以及受光元件362a、362b、362c、362d。过载监测传感器320a、320b、320c、320d在发光元件360a、360b、360c、360d与受光元件362a、362b、362c、362d之间没有被遮挡的情况下断开,在发光元件360a、360b、360c、360d与受光元件362a、362b、362c、362d之间被遮挡的情况下接通。过载监测传感器320a、320b、320c、320d与后面叙述的主控制电路基板44电连接(参照图9)。
79.如图5所示,在货架单元6上没有载放货物,且没有来自货架单元6的载荷作用于基座板20的状态下,通过螺旋弹簧314a、314b、314c、314d的作用力,监测板316a、316b、316c、316d的支撑部346a、346b、346c、346d的上表面抵接于前侧支撑部件22(或者后侧支撑部件24)的下表面。在该状态下,监测板316a、316b、316c、316d的监测部348a、348b、348c、348d没有对发光元件360a、360b、360c、360d与受光元件362a、362b、362c、362d之间进行遮挡,因此,过载监测传感器320a、320b、320c、320d断开。
80.从图5所示的状态,货物被载放在货架单元6上,来自货架单元6的载荷作用于基座板20时,柱状部件312a、312b、312c、312d与监测板316a、316b、316c、316d克服螺旋弹簧314a、314b、314c、314d的作用力而相对于前侧支撑部件22(或者后侧支撑部件24)向下方进行移动。此时,当规定的上限载荷(例如25kgf)以上的载荷作用于柱状部件312a、312b、312c、312d时,如图6所示,监测板316a、316b、316c、316d就会对发光元件360a、360b、360c、360d与受光元件362a、362b、362c、362d之间进行遮挡,过载监测传感器320a、320b、320c、320d从断开切换到接通。另外,直至圆柱部322a、322b、322c、322d的下表面抵接于基座板20的上表面为止,柱状部件312a、312b、312c、312d与监测板316a、316b、316c、316d都能够相对
于基座板20而向下方进行移动。通过采用如此的构成,过载监测机构302能够对货架单元6的过载进行监测。例如,在右前过载监测机构302a、左前过载监测机构302b、右后过载监测机构302c、左后过载监测机构302d各自的上限载荷为25kgf的情况下,过载监测机构302在货架单元6被载放有超过100kg的货物的情况下,监测到货架单元6的过载。
81.如上所述,过载监测传感器320a、320b、320c、320d均为非接触式的监测传感器。因此,能够抑制:来自货架单元6的振动或冲击传递给过载监测传感器320a、320b、320c、320d从而导致过载监测传感器320a、320b、320c、320d出现故障的情形。
82.另外,作为右前过载监测机构302a、左前过载监测机构302b、右后过载监测机构302c、以及左后过载监测机构302d,也可以使用图7所示的过载监测机构364。过载监测机构364具备:支撑部件366、柱状部件368、螺旋弹簧370、监测板372、上侧外壳374、传感器保持部件376、下侧外壳378、过载监测传感器380、以及盖帽382。
83.支撑部件366被固定于基座板20的下表面。柱状部件368具备:圆柱部384、上侧小径部386、以及下侧小径部388。圆柱部384具有:轴向沿着上下方向的大致圆柱形状。上侧小径部386配置于圆柱部384的上方,且具有:直径比圆柱部384小的大致圆柱形状。下侧小径部388配置于圆柱部384的下方,且具有:直径比圆柱部384小的大致圆柱形状。上侧小径部386从下方被插入于:形成在支撑部件366的贯通孔390。在柱状部件368的上端形成有螺纹孔392。螺栓398经由垫圈394、396而螺合于螺纹孔392。在螺栓398螺合于螺纹孔392的状态下,支撑部件366被垫圈396和圆柱部384夹持。由于贯通孔390的内径比上侧小径部386的外径大一点点,因此,柱状部件368相对于支撑部件366能够稍微倾动。
84.下侧小径部388与圆柱部384从上方被插入于:形成在上侧外壳374的收纳室400。下侧小径部388从上方被插入于:形成在收纳室400的底壁402的贯通孔404。贯通孔404的内径比下侧小径部388的外径大一点点,因此,柱状部件368相对于上侧外壳374能够稍微倾动。在柱状部件368安装有螺旋弹簧370。螺旋弹簧370的上端抵接于圆柱部384的下表面。螺旋弹簧370的下端抵接于底壁402的上表面。螺旋弹簧370将柱状部件368相对于上侧外壳374向上方施力。收纳室400的内径比圆柱部384的外径大一点点。在收纳室400的上端附近设置有:能够与圆柱部384的侧面滑动地抵接的密封部件406。密封部件406例如为树脂制的o形环。通过密封部件406,能够抑制异物侵入于收纳室400的内部。另外,在上侧外壳374的上端设置有圆环状的缓冲件408。
85.在柱状部件368的下端形成有螺纹孔410。螺栓412经由监测板372而螺合于螺纹孔410。监测板372具备:支撑部414,其具有沿着前后方向以及左右方向的大致平板形状;以及监测部416,其从支撑部414的端部向下方弯曲,且具有沿着前后方向以及上下方向的大致平板形状。在上侧外壳374的下部形成有:对监测板372的上下方向的移动进行引导的引导部418。
86.在上侧外壳374的下端固定有传感器保持部件376。在传感器保持部件376安装有过载监测传感器380。本实施例的过载监测传感器380为所谓的光电耦合器件。过载监测传感器380具备:相互地对置配置的发光元件420以及受光元件422。过载监测传感器380在发光元件420与受光元件422之间没有被遮挡的情况下断开,在发光元件420与受光元件422之间被遮挡的情况下接通。过载监测传感器380与后面叙述的主控制电路基板44(参照图9)电连接。
87.在下侧外壳378形成有:将下侧外壳378从上方贯通至下方的收纳空间424。上侧外壳374的下部从上方被插入于下侧外壳378的收纳空间424。监测板372、传感器保持部件376、以及过载监测传感器380被收纳在收纳空间424内。下侧外壳378与上侧外壳374一起被固定于前侧支撑部件22(或者后侧支撑部件24)。在下侧外壳378的下端,以能够拆装的方式安装有盖帽382。
88.如图7所示,在货架单元6上没有载放货物,且没有来自货架单元6的载荷作用于基座板20的状态下,通过螺旋弹簧370的作用力,监测板372的支撑部414的上表面抵接于上侧外壳374的底壁402的下表面。在该状态下,监测板372的监测部416未对发光元件420与受光元件422之间进行遮挡,因此,过载监测传感器380断开。
89.从图7所示的状态,货物被载放在货架单元6上,来自货架单元6的载荷作用于基座板20时,柱状部件368与监测板372克服螺旋弹簧370的作用力而相对于上侧外壳374向下方进行移动。此时,当规定的上限载荷(例如25kgf)以上的载荷作用于柱状部件368时,如图8所示,监测板372就会对发光元件420与受光元件422之间进行遮挡,过载监测传感器380从断开切换到接通。另外,直至支撑部件366的下表面抵接于缓冲件408的上表面为止,柱状部件368与监测板372都能够相对于基座板20而向下方进行移动。通过采用如此的构成,过载监测机构302能够对货架单元6的过载进行监测。
90.如上所述,过载监测传感器380为非接触式的监测传感器。因此,能够抑制:来自货架单元6的振动或冲击传递给过载监测传感器380从而导致过载监测传感器380出现故障的情形。
91.对于过载监测机构302而言,螺旋弹簧370、监测板372、过载监测传感器380的周围被上侧外壳374、下侧外壳378、盖帽382覆盖。通过采用如此的构成,能够抑制:异物附着于螺旋弹簧370、监测板372、过载监测传感器380等而给过载监测机构302的动作带来影响的情形。
92.如图3所示,右上侧框架30与左上侧框架32均为铝合金制的部件,在比基座板20靠上方的位置,沿着前后方向延伸。右上侧框架30与左上侧框架32分别被固定于基座板20的上表面。上侧控制器壳体312为树脂制的部件,在右上侧框架30与左上侧框架32之间,被固定于基座板20的上表面。如图9所示,在上侧控制器壳体312的内部收纳有自动运转控制电路基板426。在自动运转控制电路基板426搭载有:与搭载于车基台单元4的接收机电连接的无线接口(以下称之为i/f)428(参照图30)、以及与无线i/f428电连接的自动运转微型控制器单元(以下称之为mcu)430(参照图30)等。自动运转控制电路基板426与后面叙述的主控制电路基板44电连接。
93.如图3所示,蓄电池箱34为树脂制的部件,在基座板20的后部附近,被配置于比基座板20靠下方的位置。蓄电池箱34被固定于后侧支撑部件24。如图9所示,在蓄电池箱34的内部设置有:能够供蓄电池包38拆装的蓄电池安装部40。蓄电池包38具备例如锂离子电池单格等二次电池单格。搬运车2通过从安装于蓄电池安装部40的蓄电池包38被供电而进行动作。在蓄电池箱34的后部设置有能够开闭的蓄电池盖42。在打开蓄电池盖42的状态下,使蓄电池包38相对于蓄电池安装部40而沿着前后方向进行滑动,由此,能够将蓄电池包38相对于蓄电池安装部40进行拆装。
94.如图2所示,下侧控制器壳体36为树脂制的部件,在基座板20的中央附近,被配置
于比基座板20靠下方的位置。下侧控制器壳体36在被载放于右下侧框架26的上表面以及左下侧框架28的上表面的状态下,被固定于右下侧框架26与左下侧框架28。如图9、图10所示,下侧控制器壳体36对1个主控制电路基板44、2个驱动控制电路基板46、48、4个电气制动电路基板50、52、54、56进行保持。
95.如图9所示,主控制电路基板44被收纳在电路基板壳体44a的内部。电路基板壳体44a被收纳在下侧控制器壳体36的内部的后方。电路基板壳体44a配置成:主控制电路基板44沿着上下方向以及左右方向。在主控制电路基板44搭载有:后面叙述的控制电源电路432、主mcu434、切换电路436、切断电路438、440、442(参照图30)等。
96.如图10所示,驱动控制电路基板46、48分别被收纳在电路基板壳体46a、48a的内部。如图9所示,电路基板壳体46a、48a被收纳在下侧控制器壳体36的内部的前下方。电路基板壳体46a、48a配置成:驱动控制电路基板46、48沿着前后方向以及左右方向。驱动控制电路基板46、48分别与主控制电路基板44电连接。在驱动控制电路基板46搭载有:后面叙述的马达mcu444、448、452、马达驱动器454、458、462、电磁制动驱动器464(参照图30)等。在驱动控制电路基板48搭载有:后面叙述的马达mcu446、450、马达驱动器456、460、电磁制动驱动器466(参照图30)等。
97.如图10所示,电气制动电路基板50、52、54、56分别安装在散热壳体50a、52a、54a、56a。散热壳体50a、52a、54a、56a具备:分别收纳电气制动电路基板50、52、54、56的电路基板收纳部50b、52b、54b、56b、散热片50c、52c、54c、56c、以及冷却风扇50d、52d、54d、56d。散热壳体50a、52a被收纳在下侧控制器壳体36的内部的前上方。散热壳体50a、52a配置成:电气制动电路基板50、52沿着前后方向以及左右方向、且冷却风扇50d、52d朝向上方。散热壳体54a、56a被固定于:在下侧控制器壳体36的外部的前下方被固定于下侧控制器壳体36的散热板58。散热壳体54a、56a配置成:电气制动电路基板54、56沿着前后方向以及左右方向、且冷却风扇54d、56d朝向下方。电气制动电路基板50、54以及冷却风扇50d、54d与驱动控制电路基板46电连接。电气制动电路基板52、56以及冷却风扇52d、56d与驱动控制电路基板48电连接。在电气制动电路基板50、52、54、56分别搭载有:后面叙述的制动电路468、470、472、474(参照图30)等。
98.(货架单元6)
99.如图1所示,货架单元6具备:主框架60、右侧防护件62、左侧防护件64、以及前侧防护件66。主框架60、右侧防护件62、左侧防护件64、以及前侧防护件66均由钢制的圆管构成。主框架60在车基台单元4的基座板20的上方,配置成:沿着前后方向以及左右方向。主框架60在被载放于车基台单元4的右上侧框架30与左上侧框架32的上表面的状态下,被固定于右上侧框架30与左上侧框架32。在主框架60的上表面载放:由搬运车2搬运的货物。右侧防护件62以比主框架60的上表面向上方突出的方式被安装于主框架60的右端。右侧防护件62配置成:沿着前后方向以及上下方向。左侧防护件64以比主框架60的上表面向上方突出的方式被安装于主框架60的左端。左侧防护件64配置成:沿着前后方向以及上下方向。前侧防护件66以比主框架60的上表面向上方突出的方式被安装于主框架60的前端。前侧防护件66配置成:沿着左右方向以及上下方向。
100.(车把手单元8)
101.如图11所示,车把手单元8具备:开关盒70、右侧车把手72、左侧车把手74、车把手
机械臂76、支撑管78、夹持部件80、固定部件82、车把手轴84、基座部件86、转动角度传感器88、可动凸轮部件90、固定凸轮部件92、以及螺旋弹簧94。另外,以下,将右侧车把手72、左侧车把手74、车把手机械臂76、支撑管78统称为转向车把手73。
102.在开关盒70设置有:主电源开关96、模式切换开关98、触发器开关100、行进方向切换开关102、速度切换开关104、鸣笛开关106、以及led476。主电源开关96能够对搬运车2的主电源的接通/断开进行切换。模式切换开关98能够将搬运车2的动作模式在手动模式、自动模式以及停车模式之间进行切换。触发器开关100在手动模式下,能够对搬运车2的前进或后退的接通/断开进行切换、或者能够进行搬运车2的行进速度的调整。行进方向切换开关102在手动模式下,能够对搬运车2的行进方向进行切换。速度切换开关104在手动模式下,能够对搬运车2的上限行进速度进行切换。鸣笛开关106通过内置于开关盒70的蜂鸣器478(参照图30)而能够拉响鸣笛。led476能够显示:搬运车2的主电源的接通/断开、所设定的行进方向或上限行进速度。主电源开关96、模式切换开关98、触发器开关100、行进方向切换开关102、速度切换开关104、鸣笛开关106、led476、蜂鸣器478分别与主控制电路基板44(参照图9)电连接。
103.右侧车把手72具备:沿着上下方向延伸的支撑部72a、以及从支撑部72a的上端向右方弯曲的车把手部72b。支撑部72a的下端被固定于车把手机械臂76。在车把手部72b的右端设置有右侧把持部72c。开关盒70在比右侧把持部72c靠左侧的位置,被固定于车把手部72b。左侧车把手74具备:沿着上下方向延伸的支撑部74a、以及从支撑部74a的上端向左方弯曲的车把手部74b。支撑部74a的下端固定于车把手机械臂76。在车把手部74b的左端设置有左侧把持部74c。在车把手机械臂76固定有支撑管78的上端。支撑管78沿着上下方向延伸。夹持部件80具备:将支撑管78从左右两侧进行夹持的夹持片80a、80b。在夹持片80a、80b的后端形成有:通过紧固件(未图示)而被紧固的紧固部80c。当紧固部80c的紧固件被紧固时,夹持片80a、80b会被强力按压于支撑管78的外表面,从而支撑管78固定于夹持部件80。当松缓紧固部80c的紧固件时,夹持片80a、80b不会被按压于支撑管78的外表面,支撑管78相对于夹持部件80能够沿着上下方向进行移动,且能够围绕上下方向进行转动。在将紧固部80c的紧固件松缓的状态下,将支撑管78相对于夹持部件80而调整到所希望的位置以及角度之后,对紧固部80c的紧固件进行紧固,由此,能够固定支撑管78相对于夹持部件80而言的位置以及角度。
104.如图12所示,夹持部件80的前部被固定于固定部件82。在固定部件82固定有车把手轴84的上端。车把手轴84的下端以能够转动的方式被支撑于基座部件86。基座部件86被固定于车基台单元4的基座板20的上表面。在基座部件86的下部固定有转动角度传感器88。转动角度传感器88连结于车把手轴84的下端。转动角度传感器88对车把手轴84相对于基座部件86而言的转动角度进行检测。转动角度传感器88例如也可以是:对与转动角度的变化相对应的电气电阻值的变化进行检测的电位计。或者,转动角度传感器88也可以是:具备相对于基座部件86而被固定位置的霍尔元件、以及相对于车把手轴84而被固定位置的永久磁铁的磁性旋转传感器。转动角度传感器88、与主控制电路基板44(参照图9)电连接。
105.如图13所示,在车把手轴84设置有引导突起84a。引导突起84a从车把手轴84的外周面向径向外侧突出,并沿着车把手轴84的轴向延伸。
106.如图14所示,可动凸轮部件90具有大致圆筒形状。在可动凸轮部件90的下部形成
有向下方延伸的凸轮凸部90a、90b。在凸轮凸部90a、90b分别设置有第1凸轮面90c、90d、以及第2凸轮面90e、90f。从上方观察可动凸轮部件90时,第1凸轮面90c、90d以随着趋向顺时针方向而从下方趋向上方的方式进行倾斜。从上方观察可动凸轮部件90时,第2凸轮面90e、90f以随着趋向逆时针方向而从下方趋向上方的方式进行倾斜。在可动凸轮部件90的内周面形成有引导槽90g。引导槽90g具有:与引导突起84a(参照图13)相对应的宽度,且在沿着可动凸轮部件90的中心轴的方向上延伸。在可动凸轮部件90被安装于车把手轴84之时,引导突起84a以在上下方向上能够滑动的方式与引导槽90g卡合。因此,可动凸轮部件90以在上下方向上能够移动的方式被保持于车把手轴84。在可动凸轮部件90的上部形成有:对螺旋弹簧94进行支撑的弹簧承接部90h。如图12所示,螺旋弹簧94相对于固定部件82而对可动凸轮部件90向下方施力。
107.如图15所示,固定凸轮部件92具备:大致圆筒形状的圆筒部92a、以及从圆筒部92a的下端向径向外侧延伸的凸缘部92b。凸缘部92b通过紧固件(未图示)而被紧固于基座部件86(参照图12)的上表面,由此,固定凸轮部件92被固定于基座部件86。在圆筒部92a的上部形成有:与可动凸轮部件90的凸轮凸部90a、90b相对应的凸轮凹部92c、92d。在凸轮凹部92c、92d分别设置有:第1凸轮面92e、92f、第2凸轮面92g、92h。第1凸轮面92e、92f分别与可动凸轮部件90的第1凸轮面90c、90d对应。第2凸轮面92g、92h分别与可动凸轮部件90的第2凸轮面90e、90f对应。另外,在圆筒部92a的内周面设置有止挡部92i、92j。如图16所示,止挡部92i、92j在车把手轴84相对于固定凸轮部件92而进行转动时,通过抵接于车把手轴84的引导突起84a,而对车把手轴84的转动范围进行限制。
108.在图11所示的车把手单元8,当用户使转向车把手73向从上方观察时的顺时针方向(或者逆时针方向)转动时,车把手轴84就会向顺时针方向(或者逆时针方向)进行转动。此时,如图17所示,可动凸轮部件90与车把手轴84一体地进行转动,由此,可动凸轮部件90的第1凸轮面90c、90d(或者第2凸轮面90e、90f)相对于固定凸轮部件92的第1凸轮面92e、92f(或者第2凸轮面92g、92h)而滑动,可动凸轮部件90一边相对于固定凸轮部件92而相对地进行转动,一边克服螺旋弹簧94的作用力而向上方进行移动。此时,可动凸轮部件90从固定凸轮部件92受到的反向力所带来的转矩作用于:使转向车把手73转动的用户。
109.(转向单元10)
110.如图18所示,转向单元10在车基台单元4的基座板20(参照图2)的前部下方,被安装于前侧支撑部件22。转向单元10连结于前轮单元12,进行前轮单元12的转向。
111.如图19所示,转向单元10具备:马达外壳160、马达支撑部件162、齿轮外壳164、转向角传感器166、转向轴168、转向板170、右侧连接杆172、以及左侧连接杆174。马达外壳160被固定于马达支撑部件162。马达支撑部件162被固定于齿轮外壳164。齿轮外壳164被固定于车基台单元4的前侧支撑部件22(参照图18)。
112.如图20所示,在马达外壳160的内部收纳有转向马达176。转向马达176例如为内转子型的无刷dc马达。转向马达176、与驱动控制电路基板46(参照图10)电连接。转向马达176具备:沿着前后方向延伸的马达轴176a、以及对马达轴176a的旋转进行检测的霍尔传感器480(参照图34)。马达轴176a在后端附近,以能够旋转的方式被保持于马达外壳160,且在前部,以能够旋转的方式被保持于马达支撑部件162。马达轴176a的前部贯通马达支撑部件162,并进入于齿轮外壳164的内部。在马达轴176a的前端附近形成有齿轮部176b。
113.在齿轮外壳164的内部收纳有:主轴178、凸轮180、可动齿轮182、螺旋弹簧184、圆筒蜗杆186、蜗轮188、以及中继轴190。主轴178配置成:沿着前后方向。主轴178在前端附近和后部,以能够旋转的方式被保持于齿轮外壳164。另外,主轴178在后端附近,以能够旋转的方式被保持于马达支撑部件162。
114.凸轮180固定于主轴178的后端附近。如图21所示,在凸轮180的前表面形成有凸轮沟180a。可动齿轮182在比凸轮180靠前方的位置,被安装于主轴178。可动齿轮182相对于主轴178而能够沿着前后方向进行移动,且以能够围绕前后方向旋转的方式,被保持于主轴178。在可动齿轮182的外周面形成有:与马达轴176a的齿轮部176b(参照图20)啮合的齿轮部182a。在可动齿轮182的后部形成有:供凸轮180进入的凹部182b。在凹部182b形成有:与凸轮180的凸轮沟180a相对应的凸轮突起182c。螺旋弹簧184在比可动齿轮182靠前方的位置,被安装于主轴178。螺旋弹簧184被保持于:设置在主轴178的弹簧承接部178a。螺旋弹簧184相对于主轴178而将可动齿轮182向后方施力。
115.当马达轴176a(参照图20)进行旋转时,可动齿轮182也进行旋转。在可动齿轮182的凸轮突起182c与凸轮180的凸轮沟180a卡合的情况下,伴随着可动齿轮182的旋转,凸轮180进行旋转,据此,主轴178也进行旋转。在作用于可动齿轮182与凸轮180之间的转矩较小的情况下,通过螺旋弹簧184的作用力,维持凸轮突起182c与凸轮沟180a的卡合,从而从马达轴176a向主轴178传递的旋转被维持。与此相对,在作用于可动齿轮182与凸轮180之间的转矩较大的情况下,可动齿轮182克服螺旋弹簧184的作用力而向前方进行移动,凸轮突起182c与凸轮沟180a的卡合被解除,从而从马达轴176a向主轴178传递的旋转被切断。即,由凸轮180、可动齿轮182、以及螺旋弹簧184构成转矩限制器181。
116.如图20所示,圆筒蜗杆186被固定于主轴178的前部。蜗轮188配置成:与圆筒蜗杆186啮合。如图22所示,蜗轮188被固定于中继轴190的上部。中继轴190配置成:沿着上下方向。中继轴190在上端附近和中央部,以能够旋转的方式被保持于齿轮外壳164。在中继轴190的下端附近形成有齿轮部190a。
117.在齿轮外壳164的上部固定有转向角传感器166。转向角传感器166连结于中继轴190的上端。转向角传感器166对中继轴190相对于齿轮外壳164而言的转动角度进行检测。转向角传感器166例如也可以是:对与转动角度的变化相对应的电阻值的变化进行检测的电位计。或者,转向角传感器166也可以是:具备相对于齿轮外壳164而被固定位置的霍尔元件、以及相对于中继轴190而被固定位置的永久磁铁的磁性旋转传感器。转向角传感器166与主控制电路基板44(参照图9)电连接。
118.转向轴168在上端附近和上部,以能够旋转的方式被保持于齿轮外壳164。转向轴168配置成:沿着上下方向。在转向轴168的上部形成有:与中继轴190的齿轮部190a啮合的齿轮部168a。转向轴168的下端被固定于转向板170的前端附近。如图19所示,转向板170具有:前后方向为长边方向、且左右方向为短边方向的细长的平板形状。在转向板170的后端附近分别连结有:右侧连接杆172的后端、以及左侧连接杆174的后端。右侧连接杆172的后端以能够围绕与右侧连接杆172的长边方向正交的二轴转动的方式连结于转向板170。左侧连接杆174的后端以能够围绕与左侧连接杆174的长边方向正交的二轴转动的方式连结于转向板170。
119.如图20所示,当通过马达轴176a的旋转而使主轴178进行旋转时,主轴178的旋转
借助圆筒蜗杆186和蜗轮188而传递给中继轴190。如图22所示,当中继轴190进行转动时,伴随于此,转向轴168进行转动,转向板170的后端向左右方向进行转动。通过该转向板170的转动,图19所示的右侧连接杆172以及左侧连接杆174进行移动,进行前轮单元12的转向。另外,在以下的说明中,将转向轴168、转向板170、右侧连接杆172、左侧连接杆174、主轴178、转矩限制器181、圆筒蜗杆186、蜗轮188、以及中继轴190统称为传递机构169。
120.主控制电路基板44(参照图9)在手动模式下,基于来自车把手单元8(参照图11)的转动角度传感器88的检测信号,计算出应该在转向单元10实现的转向角。而且,主控制电路基板44基于应该在转向单元10实现的转向角,计算出应该由转向马达176实现的旋转角度,并向驱动控制电路基板46发出使转向马达176驱动的指示。据此,在转向单元10,实现与用户在车把手单元8进行的操作相对应的转向角。
121.(前轮单元12)
122.如图18所示,前轮单元12在车基台单元4的基座板20(参照图2)的前部下方,被安装于前侧支撑部件22。前轮单元12具备:右前轮单元12a、以及左前轮单元12b。右前轮单元12a具备:右前轮192、右侧齿轮外壳194、右侧马达外壳196、右侧中枢销198、右侧套筒200、右上侧臂202、右下侧臂204、右侧缓冲部件206、以及右侧转向板208。左前轮单元12b具备:左前轮212、左侧齿轮外壳214、左侧马达外壳216、左侧中枢销218、左侧套筒220、左上侧臂222、左下侧臂224、左侧缓冲部件226、以及左侧转向板228。另外,在以下的说明中,将右侧齿轮外壳194、右侧中枢销198、右侧套筒200、以及右侧转向板208统称为右侧保持部件195,将左侧齿轮外壳214、左侧中枢销218、左侧套筒220、以及左侧转向板228统称为左侧保持部件215。另外,将右侧保持部件195、右上侧臂202、右下侧臂204、右侧缓冲部件206、左侧保持部件215、左上侧臂222、左下侧臂224、左侧缓冲部件226、以及转向单元10统称为悬架机构11。
123.如图23所示,右侧齿轮外壳194配置于右前轮192的左侧。右侧马达外壳196被固定于右侧齿轮外壳194的左部。如图24所示,在右侧马达外壳196的内部收纳有右前轮马达232。右前轮马达232例如为内转子型的无刷dc马达。右前轮马达232、与驱动控制电路基板46(参照图10)电连接。右前轮马达232具备:沿着左右方向延伸的右前轮马达轴232a、以及对右前轮马达轴232a的旋转进行检测的霍尔传感器482(参照图32)。右前轮马达轴232a在左端附近,以能够旋转的方式被保持于右侧马达外壳196,且在右端附近,以能够旋转的方式被保持于右侧齿轮外壳194。右前轮192具备:向左侧延伸的右前轮车轴192a。右前轮车轴192a在左端附近,以能够旋转的方式被保持于右侧齿轮外壳194。在右侧齿轮外壳194的内部收纳有:行星齿轮机构234。行星齿轮机构234将右前轮马达轴232a的旋转进行减速,并传递给右前轮车轴192a。当右前轮马达232进行驱动时,右前轮马达轴232a的旋转借助行星齿轮机构234而被传递给右前轮车轴192a,从而右前轮192进行旋转。
124.右侧中枢销198被固定于右侧齿轮外壳194的上部。右侧中枢销198沿着上下方向延伸。右侧中枢销198的上部进入于右侧套筒200的内部。右侧中枢销198在右侧套筒200的上端附近与下端附近,以能够旋转的方式被保持于右侧套筒200。如图23所示,右上侧臂202的右端以能够围绕沿着前后方向的转动轴转动的方式连结于右侧套筒200的上部。右下侧臂204的右端以能够围绕沿着前后方向的转动轴转动的方式连结于右侧套筒200的下部。如图18所示,右上侧臂202的左端以能够围绕沿着前后方向的转动轴转动的方式连结于前侧
支撑部件22的右上侧连结部22a。右下侧臂204的左端以能够围绕沿着前后方向的转动轴转动的方式连结于前侧支撑部件22的右下侧连结部22b。因此,右侧套筒200以在右上侧臂202与右下侧臂204的可动范围内能够移动的方式被支撑于前侧支撑部件22。
125.右侧缓冲部件206具备:减震器206a、以及螺旋弹簧206b。右侧缓冲部件206的上端以能够围绕沿着前后方向的转动轴转动的方式连结于前侧支撑部件22的前表面。右侧缓冲部件206的下端以能够围绕沿着前后方向的转动轴转动的方式连结于右下侧臂204的前表面。因此,右前轮192相对于前侧支撑部件22而沿着上下方向进行移动之时,通过减震器206a的衰减力、以及螺旋弹簧206b的弹性恢复力,能够抑制:来自右前轮192的冲击或振动传递给车基台单元4的情形。
126.如图23所示,右侧转向板208固定于右侧中枢销198的下端附近。右侧连接杆172的前端以能够围绕与右侧连接杆172的长边方向正交的二轴转动的方式连结于右侧转向板208的左前端。从上方观察右前轮单元12a时,右侧连接杆172相对于右上侧臂202以及右下侧臂204而交叉。在前轮单元12向右方(或者左方)转向的情况下,转向板170(参照图19)的后端向右方(或者左方)进行移动,据此,在将右侧中枢销198的轴向作为转舵轴而从上方观察右侧套筒200时,右侧转向板208、右侧中枢销198、右侧齿轮外壳194、右侧马达外壳196、以及右前轮192相对于右侧套筒200而沿着顺时针方向(或者逆时针方向)进行转动。
127.如图18所示,左前轮单元12b具备:与右前轮单元12a左右对称的构成。以下,参照图示了右前轮单元12a的图23、图24来说明左前轮单元12b。
128.如图23所示,左侧齿轮外壳214配置于左前轮212的右侧。左侧马达外壳216固定于左侧齿轮外壳214的右部。如图24所示,在左侧马达外壳216的内部收纳有左前轮马达242。左前轮马达242例如为内转子型的无刷dc马达。左前轮马达242与驱动控制电路基板48(参照图10)电连接。左前轮马达242具备:沿着左右方向延伸的左前轮马达轴242a、以及对左前轮马达轴242a的旋转进行检测的霍尔传感器484(参照图32)。左前轮马达轴242a在右端附近,以能够旋转的方式被保持于左侧马达外壳216,且在左端附近,以能够旋转的方式被保持于左侧齿轮外壳214。左前轮212具备:向右方延伸的左侧车轴212a。左侧车轴212a在右端附近,以能够旋转的方式被保持于左侧齿轮外壳214。在左侧齿轮外壳214的内部收纳有行星齿轮机构244。行星齿轮机构244将左前轮马达轴242a的旋转进行减速,并传递给左侧车轴212a。当左前轮马达242进行驱动时,左前轮马达轴242a的旋转借助行星齿轮机构244而传递给左侧车轴212a,从而左前轮212进行旋转。
129.左侧中枢销218被固定于左侧齿轮外壳214的上部。左侧中枢销218沿着上下方向延伸。左侧中枢销218的上部进入于左侧套筒220的内部。左侧中枢销218在左侧套筒220的上端附近和下端附近,以能够旋转的方式被保持于左侧套筒220。如图23所示,左上侧臂222的左端以能够围绕沿着前后方向的转动轴转动的方式连结于左侧套筒220的上部。左下侧臂224的左端以能够围绕沿着前后方向的转动轴转动的方式连结于左侧套筒220的下部。如图18所示,左上侧臂222的右端以能够围绕沿着前后方向的转动轴转动的方式连结于前侧支撑部件22的左上侧连结部22c。左下侧臂224的右端以能够围绕沿着前后方向的转动轴转动的方式连结于前侧支撑部件22的左下侧连结部22d。因此,左侧套筒220以在左上侧臂222和左下侧臂224的可动范围内能够移动的方式被支撑于前侧支撑部件22。
130.左侧缓冲部件226具备:减震器226a、以及螺旋弹簧226b。左侧缓冲部件226的上端
以能够围绕沿着前后方向的转动轴转动的方式连结于前侧支撑部件22的前表面。左侧缓冲部件226的下端以能够围绕沿着前后方向的转动轴转动的方式连结于左下侧臂224的前表面。由此,在左前轮212相对于前侧支撑部件22而沿着上下方向进行移动之时,通过减震器226a的衰减力、以及螺旋弹簧226b的弹性恢复力,能够抑制:来自左前轮212的冲击或振动传递给车基台单元4的情形。
131.如图23所示,左侧转向板228被固定于左侧中枢销218的下端附近。左侧连接杆174的前端以能够围绕与左侧连接杆174的长边方向正交的二轴转动的方式连结于左侧转向板228的右前端。从上方观察左前轮单元12b时,左侧连接杆174相对于左上侧臂222以及左下侧臂224而交叉。在前轮单元12向右方(或者左方)转向的情况下,转向板170(参照图19)的后端向右方(或者左方)进行移动,据此,在将左侧中枢销218的轴向作为转舵轴而从上方观察左侧套筒220时,左侧转向板228、左侧中枢销218、左侧齿轮外壳214、左侧马达外壳216、以及左前轮212相对于左侧套筒220而沿着顺时针方向(或者逆时针方向)进行转动。
132.(后轮单元14)
133.如图25所示,后轮单元14在车基台单元4的基座板20(参照图2)的后部下方,被安装于后侧支撑部件24。后轮单元14具备:右后轮单元14a、以及左后轮单元14b。右后轮单元14a具备:右后轮252、右侧齿轮外壳254、右侧马达外壳256、右侧制动器外壳258、右侧离合器杆260、以及右侧缓冲部件264。左后轮单元14b具备:左后轮272、左侧齿轮外壳274、左侧马达外壳276、左侧制动器外壳278、左侧离合器杆280、以及左侧缓冲部件284。
134.如图26所示,右侧齿轮外壳254配置于右后轮252的左侧,将右后轮252的右后轮车轴(未图示)保持成能够旋转。右侧齿轮外壳254从右后轮车轴向前上方延伸。右侧马达外壳256被固定于右侧齿轮外壳254的前上方的左部。右侧制动器外壳258被固定于右侧马达外壳256的左部。在右侧马达外壳256的内部收纳有右后轮马达486(参照图30)。右后轮马达486例如为内转子型的无刷dc马达。右后轮马达486、与驱动控制电路基板46(参照图10)电连接。右后轮马达486具备:沿着左右方向延伸的右后轮马达轴(未图示)、以及对右后轮马达轴的旋转进行检测的霍尔传感器488(参照图32)。在右侧制动器外壳258收纳有右后轮电磁制动器490(参照图30)。右后轮电磁制动器490连结于右后轮马达轴。右后轮电磁制动器490在允许右后轮马达轴旋转的状态与禁止旋转的状态之间进行切换。右后轮电磁制动器490与驱动控制电路基板46(参照图10)电连接。在停车模式下,右后轮电磁制动器490被维持在:禁止右后轮马达轴旋转的状态。
135.在右侧齿轮外壳254的内部收纳有:正齿轮机构(未图示)、以及离合器机构(未图示)。正齿轮机构对右后轮马达轴的旋转进行减速,并传递给右后轮车轴。当右后轮马达486进行驱动时,右后轮马达轴的旋转借助正齿轮机构而传递给右后轮车轴,从而右后轮252进行旋转。离合器机构根据针对右侧离合器杆260的操作,在允许从右后轮马达轴向右后轮车轴传递旋转的状态、与切断的状态之间进行切换。因此,在右后轮电磁制动器490已禁止右后轮马达轴旋转时,将离合器机构切换到:对从右后轮马达轴向右后轮车轴传递旋转予以切断的状态,由此,能够抑制右后轮252被锁止的情形。
136.在右侧齿轮外壳254的前上端附近设置有连结部254a。连结部254a以能够围绕沿着左右方向的转动轴转动的方式连结于后侧支撑部件24。右侧缓冲部件264具备:减震器264a、以及螺旋弹簧264b。右侧缓冲部件264的上端在比连结部254a靠后上方的位置,以能
够围绕沿着左右方向的转动轴转动的方式连结于后侧支撑部件24。右侧缓冲部件264的下端以能够围绕沿着左右方向的转动轴转动的方式连结于右侧齿轮外壳254的后上表面。因此,在右后轮252相对于后侧支撑部件24而沿着上下方向进行移动之时,通过减震器264a的衰减力、以及螺旋弹簧264b的弹性恢复力,能够抑制:来自右后轮252的冲击或振动传递给车基台单元4的情形。
137.如图25所示,左后轮单元14b具备:与右后轮单元14a左右对称的构成。以下,参照图示了右后轮单元14a的图26来说明左后轮单元14b。
138.如图26所示,左侧齿轮外壳274配置于左后轮272的右侧,将左后轮272的左后轮车轴(未图示)保持成能够旋转。左侧齿轮外壳274从左后轮车轴向前上方延伸。左侧马达外壳276被固定于左侧齿轮外壳274的前上方的右部。左侧制动器外壳278被固定于左侧马达外壳276的右部。在左侧马达外壳276的内部收纳有左后轮马达492(参照图30)。左后轮马达492例如为内转子型的无刷dc马达。左后轮马达492、与驱动控制电路基板48(参照图10)电连接。左后轮马达492具备:沿着左右方向延伸的左后轮马达轴(未图示)、以及对左后轮马达轴的旋转进行检测的霍尔传感器494(参照图32)。在左侧制动器外壳278收纳有左后轮电磁制动器496(参照图30)。左后轮电磁制动器496连结于左后轮马达轴。左后轮电磁制动器496在允许左后轮马达轴旋转的状态与禁止旋转的状态之间进行切换。左后轮电磁制动器496、与驱动控制电路基板48(参照图10)电连接。驱动控制电路基板48对左后轮电磁制动器496的动作进行控制。在停车模式下,左后轮电磁制动器496被维持在:禁止左后轮马达轴旋转的状态。
139.在左侧齿轮外壳274的内部收纳有:正齿轮机构(未图示)、以及离合器机构(未图示)。正齿轮机构对左后轮马达轴的旋转进行减速,并传递给左后轮车轴。当左后轮马达492进行驱动时,左后轮马达轴的旋转借助正齿轮机构而传递给左后轮车轴,从而左后轮272进行旋转。离合器机构根据针对左侧离合器杆280的操作,在允许从左后轮马达轴向左后轮车轴传递旋转的状态、与切断的状态之间进行切换。因此,在左后轮电磁制动器496已禁止左后轮马达轴旋转时,将离合器机构切换到:对从左后轮马达轴向左后轮车轴传递旋转予以切断的状态,由此,能够抑制左后轮272被锁止的情形。
140.在左侧齿轮外壳274的前上端附近设置有连结部274a。连结部274a以能够围绕沿着左右方向的转动轴转动的方式连结于后侧支撑部件24。左侧缓冲部件284具备:减震器284a、以及螺旋弹簧284b。左侧缓冲部件284的上端在连结部274a的后方上方,以能够围绕沿着左右方向的转动轴转动的方式连结于后侧支撑部件24。左侧缓冲部件284的下端以能够围绕沿着左右方向的转动轴转动的方式连结于左侧齿轮外壳274的后上表面。因此,在左后轮272相对于后侧支撑部件24而沿着上下方向进行移动之时,通过减震器284a的衰减力、以及螺旋弹簧284b的弹性恢复力,能够抑制:来自左后轮272的冲击或振动传递给车基台单元4的情形。
141.(保险杠单元16)
142.如图1所示,保险杠单元16在车基台单元4的基座板20的前部下方,被安装于前侧支撑部件22。如图27所示,保险杠单元16具备:基座部件500、外壳502、右侧前照灯504、左侧前照灯506、保险杠框架508、保险杠支撑部件510、512、直动管514、516、螺旋弹簧518、520、直动轴承522、524(参照图28)、抵接板526、528(参照图29)、以及碰撞监测开关530、532(参
照图29)。
143.基座部件500被固定于车基台单元4的前侧支撑部件22(参照图2)。如图27所示,外壳502被固定于基座部件500。外壳502具备:收纳部502a,其具有左右方向为长边方向的大致长方体的箱型形状;右侧支撑部502b,其形成在收纳部502a的右端;以及左侧支撑部502c,其形成在收纳部502a的左端部。右侧前照灯504被固定于右侧支撑部502b。左侧前照灯506被固定于左侧支撑部502c。右侧前照灯504与左侧前照灯506分别对搬运车2的前方进行照明。右侧前照灯504和左侧前照灯506分别与主控制电路基板44(参照图9)电连接。
144.保险杠框架508由钢制的圆管构成。保险杠支撑部件510、512分别配置于保险杠框架508的后方,且被固定于保险杠框架508。保险杠支撑部件510借助螺栓534a、534b以及螺母536a、536b(参照图28)而被安装于直动管514。保险杠支撑部件512借助螺栓538a、538b以及螺母540a、540b而被安装于直动管516。
145.如图28所示,直动管514配置成:长边方向沿着前后方向。在直动管514的前端附近形成有:在前后方向上并排配置、且分别在前后方向具有长边方向的长孔514a、514b。螺栓534a贯通长孔514a,螺栓534b贯通长孔514b。因此,保险杠支撑部件510以在螺栓534a、534b抵接于长孔514a、514b的前缘的位置与螺栓534a、534b抵接于长孔514a、514b的后缘的位置之间能够沿着前后方向进行移动的方式被支撑于直动管514。同样地,直动管516配置成:长边方向沿着前后方向。在直动管516的前端附近形成有:在前后方向上并排配置、且分别在前后方向具有长边方向的长孔516a、516b。螺栓538a贯通长孔516a,螺栓538b贯通长孔516b。因此,保险杠支撑部件512以在螺栓538a、538b抵接于长孔516a、516b的前缘的位置与螺栓538a、538b抵接于长孔516a、516b的后缘的位置之间能够沿着前后方向进行移动的方式被支撑于直动管516。
146.直动管514、516的后端贯通基座部件500与外壳502的前壁而进入于外壳502的内部。直动管514、516在后端附近,以沿着前后方向能够移动的方式被支撑于直动轴承522、524。直动轴承522、524被固定于外壳502的前壁。在直动管514、516安装有螺旋弹簧518、520。螺旋弹簧518、520的前端抵接于保险杠支撑部件510、512的后表面,螺旋弹簧518、520的后端抵接于基座部件500的前表面。螺旋弹簧518、520相对于基座部件500而将保险杠支撑部件510、512向前方施力。
147.如图29所示,在直动管514、516的后端固定有抵接板526、528。抵接板526、528具备:向径向外侧延伸的抵接部526a、528a。在抵接部526a、528a的前方配置有碰撞监测开关530、532。在没有外力作用于保险杠框架508的状态下,通过螺旋弹簧518、520的作用力,直动管514、516相对于外壳502而向前方进行移动。这种情况下,抵接部526a、528a抵接于碰撞监测开关530、532,碰撞监测开关530、532断开。当有朝向后方的外力作用于保险杠框架508时,直动管514、516克服螺旋弹簧518、520的作用力而相对于外壳502向后方进行移动。这种情况下,抵接部526a、528a离开碰撞监测开关530、532,碰撞监测开关530、532接通。碰撞监测开关530、532分别与主控制电路基板44(参照图9)电连接。
148.(搬运车2的电路构成)
149.如图30所示,控制电源电路432、与主电源开关96电连接。控制电源电路432在针对主电源开关96进行了接通操作的情况下,允许从蓄电池包38供电,在针对主电源开关96进行了断开操作的情况下,禁止从蓄电池包38供电。在搬运车2的主电源为接通的情况下,控
制电源电路432将从蓄电池包38供给的电力以不将蓄电池包38的电压(vbat)降低的状态向切断电路438、440、442供给。另外,在搬运车2的主电源接通的情况下,控制电源电路432将从蓄电池包38供给的电力自蓄电池包38的电压(vbat)降低到规定的电压(vcc),并供给于主mcu434、切换电路436、自动运转mcu430、马达mcu444、446、448、450、452等各电子器件。以下,也将蓄电池包38的电压(vbat)的电位称为蓄电池电位,将通过控制电源电路432而被降低的电压(vcc)的电位称为电源电位。
150.主mcu434对搬运车2的整体的动作进行控制。主电源开关96、速度切换开关104、鸣笛开关106、led476、蜂鸣器478、转向角传感器166、过载监测传感器320a、320b、320c、320d、右侧前照灯504、以及左侧前照灯506均与主mcu434电连接。另外,模式切换开关98、触发器开关100、行进方向切换开关102、紧急停止开关308、碰撞监测开关530、532、转动角度传感器88经由切换电路436而与主mcu434电连接。此外,无线i/f428经由自动运转mcu430而与主mcu434电连接。自动运转mcu430基于来自无线i/f428的信号,生成:在搬运车2以自动模式进行的追踪运转或遥控运转之时搬运车2应该实现的行驶轨道,并作为指令值而向主mcu434输出。
151.马达mcu444、446、448、450、452与主mcu434电连接。马达mcu444借助马达驱动器454而对右前轮马达232的动作进行控制,而且还对制动电路468、冷却风扇50d的动作进行控制。马达mcu446借助马达驱动器456而对左前轮马达242的动作进行控制,而且还对制动电路470、冷却风扇52d的动作进行控制。马达mcu448借助马达驱动器458而对右后轮马达486的动作进行控制,而且还对制动电路472、冷却风扇54d的动作进行控制。另外,马达mcu448借助电磁制动驱动器464而对右后轮电磁制动器490的动作进行控制。马达mcu450借助马达驱动器460而对左后轮马达492的动作进行控制,而且还对制动电路474、冷却风扇56d的动作进行控制。另外,马达mcu450借助电磁制动驱动器466而对左后轮电磁制动器496的动作进行控制。马达mcu452借助马达驱动器462而对转向马达176的动作进行控制。
152.切断电路438设置在:从控制电源电路432向马达驱动器454、456、458、460供给电力的电力供给路径上。切断电路438在允许从控制电源电路432向马达驱动器454、456、458、460供给电力的状态、与禁止的状态之间进行切换。切断电路440设置在:从控制电源电路432向电磁制动驱动器464、466供给电力的电力供给路径上。切断电路440在允许从控制电源电路432向电磁制动驱动器464、466供给电力的状态与禁止的状态之间进行切换。切断电路442设置在:从控制电源电路432向马达驱动器462供给电力的电力供给路径上。切断电路442在允许从控制电源电路432向马达驱动器462供给电力的状态与禁止的状态之间进行切换。切断电路438、440、442均与主mcu434以及切换电路436电连接。
153.(切换电路436的构成)
154.如图31所示,切换电路436具备:消除电路542、544、546、延迟电路548、and门550、552、or门554、556、not门558、560、562、564、566、以及电阻568、570、572、574、576、578。
155.模式切换开关98具备:接地端子98a、手动模式端子98b、以及自动模式端子98c。接地端子98a连接于接地电位。手动模式端子98b经由电阻568而连接于电源电位,而且还连接于主mcu434。自动模式端子98c经由电阻570而连接于电源电位,而且还连接于主mcu434。
156.在用户于模式切换开关98处选择了手动模式的情况下,接地端子98a和手动模式端子98b导通,接地端子98a与自动模式端子98c不导通。这种情况下,手动模式端子98b为l
电位,自动模式端子98c为h电位。当来自手动模式端子98b的输入为l电位时,主mcu434就会识别为:用户选择了手动模式。在用户于模式切换开关98处选择了自动模式的情况下,接地端子98a与手动模式端子98b不导通,接地端子98a与自动模式端子98c导通。这种情况下,手动模式端子98b为h电位,自动模式端子98c为l电位。当来自自动模式端子98c的输入为l电位时,主mcu434就会识别为:用户选择了自动模式。在用户于模式切换开关98处选择了停车模式的情况下,接地端子98a与手动模式端子98b不导通,接地端子98a与自动模式端子98c也不导通。这种情况下,手动模式端子98b为h电位,自动模式端子98c也为h电位。当来自手动模式端子98b的输入与来自自动模式端子98c的输入的双方均为h电位时,主mcu434就会识别为:用户选择了停车模式。
157.消除电路542具备:晶体管542a、以及电阻542b、542c、542d。晶体管542a为pnp型的晶体管。电阻542b的一端连接于晶体管542a的发射极,其另一端连接于晶体管542a的基极。电阻542c的一端连接于晶体管542a的基极,其另一端连接于模式切换开关98的自动模式端子98c。电阻542d的一端连接于转动角度传感器88,其另一端连接于晶体管542a的集电极。另外,晶体管542a的发射极连接于电源电位,晶体管542a的集电极连接于主mcu434。
158.转动角度传感器88将与转动角度相对应的电位输出给消除电路542。在自动模式端子98c为h电位的情况下,晶体管542a断开,从转动角度传感器88输出的电位被输入于主mcu434。在自动模式端子98c为l电位的情况下,晶体管542a接通,h电位被输入于主mcu434,而与从转动角度传感器88输出的电位无关。即,在模式切换开关98而选择了自动模式的情况下,消除电路542取消来自转动角度传感器88的输入信号。
159.触发器开关100具备:接地端子100a、触发器端子100b、以及可变电阻100c。接地端子100a连接于接地电位。触发器端子100b经由电阻572而连接于电源电位。在用户没有对触发器开关100进行接通操作的情况下,接地端子100a与触发器端子100b不导通,触发器端子100b为h电位。在用户对触发器开关100进行了接通操作的情况下,接地端子100a与触发器端子100b导通,触发器端子100b为l电位。触发器开关100的可变电阻100c的一端连接于接地电位,其另一端连接于电源电位,与用户对触发器开关100进行了接通操作时的按入量相对应的电位被输出给消除电路544。
160.消除电路544具备:晶体管544a、以及电阻544b、544c、544d。晶体管544a为pnp型的晶体管。电阻544b的一端连接于晶体管544a的发射极,其另一端连接于晶体管544a的基极。电阻544c的一端连接于晶体管544a的基极,其另一端连接于模式切换开关98的自动模式端子98c。电阻544d的一端连接于触发器开关100的可变电阻100c,其另一端连接于晶体管544a的集电极。另外,晶体管544a的发射极连接于电源电位,晶体管544a的集电极连接于主mcu434。
161.在自动模式端子98c为h电位的情况下,晶体管544a断开,从可变电阻100c输出的电位被输入于主mcu434。这种情况下,主mcu434基于从可变电阻100c输出的电位来识别用户针对触发器开关100的操作。在自动模式端子98c为l电位的情况下,晶体管544a接通,h电位被输入于主mcu434,而与从可变电阻100c输出的电位无关。即,在模式切换开关98处选择了自动模式的情况下,消除电路544取消来自触发器开关100的可变电阻100c的输入信号。
162.触发器开关100的触发器端子100b经由not门558而连接于or门554的第1输入端子。模式切换开关98的自动模式端子98c经由not门560而连接于or门554的第2输入端子。or
门554的输出端子连接于and门550的第1输入端子。and门550的输出端子连接于切断电路438。如后面叙述的那样,在and门550的输出端子为h电位的情况下,切断电路438允许向马达驱动器454、456、458、460供给电力,在and门550的输出端子为l电位的情况下,切断向马达驱动器454、456、458、460供给电力。
163.如后面叙述的那样,and门550的第2输入端子通常被输入h电位。这种情况下,如果自动模式端子98c为h电位,则当触发器端子100b为h电位时,or门554的输出端子与and门550的输出端子为l电位,当触发器端子100b为l电位时,or门554的输出端子与and门550的输出端子为h电位。因此,在模式切换开关98处没有选择自动模式的情况下,当触发器开关100被进行了接通操作时,切断电路438被输入h电位,当触发器开关100没有被进行接通操作时,切断电路438被输入l电位。与此相对,如果自动模式端子98c为l电位,则or门554的输出端子与and门550的输出端子为h电位,而与触发器端子100b的电位无关。因此,在模式切换开关98处选择了自动模式的情况下,从切换电路436向切断电路438输入h电位,而与是否针对触发器开关100进行了接通操作无关。
164.and门550的输出端子也连接于延迟电路548的输入端子。延迟电路548的输出端子连接于切断电路440。如后面叙述的那样,在延迟电路548的输出端子为h电位的情况下,切断电路440允许向电磁制动驱动器464、466供给电力,在延迟电路548的输出端子为l电位的情况下,切断电路440切断向电磁制动驱动器464、466供给电力。延迟电路548具备:二极管548a、电阻548b、电容器548c、以及缓冲门548d。二极管548a的阳极连接于延迟电路548的输入端子。二极管548a的阴极连接于缓冲门548d的输入端子。电阻548b的一端连接于二极管548a的阴极,其另一端连接于接地电位。电容器548c的一端连接于二极管548a的阴极,其另一端连接于接地电位。缓冲门548d的输出端子连接于延迟电路548的输出端子。在and门550的输出端子从l电位向h电位切换的情况下,在经过了由电阻548b与电容器548c的时间常数决定的规定的延迟时间之后,延迟电路548的输出端子也从l电位向h电位切换。另外,在and门550的输出端子从h电位向l电位切换的情况下,在经过了由电阻548b与电容器548c的时间常数决定的规定的延迟时间之后,延迟电路548的输出端子也从h电位向l电位切换。
165.紧急停止开关308具备:接地端子308a、以及紧急停止端子308b。接地端子308a连接于接地电位。紧急停止端子308b经由电阻574而连接于电源电位,且连接于主mcu434。在紧急停止开关308断开的情况下,接地端子308a与紧急停止端子308b导通,紧急停止端子308b为l电位。在紧急停止开关308接通的情况下,接地端子308a与紧急停止端子308b不导通,紧急停止端子308b为h电位。当来自紧急停止端子308b的输入为h电位时,主mcu434就会识别为:用户已将紧急停止开关308接通。
166.碰撞监测开关530具备:接地端子530a、以及碰撞监测端子530b。碰撞监测开关532具备:接地端子532a、以及碰撞监测端子532b。接地端子530a连接于接地电位。碰撞监测端子530b连接于接地端子532a。碰撞监测端子532b经由电阻576而连接于电源电位,而且还连接于主mcu434。在碰撞监测开关530呈断开的情况下,接地端子530a与碰撞监测端子530b导通,在碰撞监测开关530接通的情况下,接地端子530a与碰撞监测端子530b不导通。在碰撞监测开关532断开的情况下,接地端子532a与碰撞监测端子532b导通,在碰撞监测开关532接通的情况下,接地端子532a与碰撞监测端子532b不导通。由此,在碰撞监测开关530、532的双方均断开的情况下,碰撞监测端子532b为l电位,在碰撞监测开关530、532的一方或者
双方接通的情况下,碰撞监测端子532b为h电位。当来自碰撞监测端子532b的输入为h电位时,主mcu434识别为:通过碰撞监测开关530、532监测到了碰撞。
167.行进方向切换开关102具备:接地端子102a、以及行进方向端子102b。接地端子102a连接于接地电位。行进方向端子102b连接于消除电路546。对于行进方向切换开关102,在用户选择了前进的情况下,接地端子102a与行进方向端子102b不导通,在由用户选择了后退的情况下,接地端子102a与行进方向端子102b导通。
168.消除电路546具备:晶体管546a、以及电阻546b、546c、546d。晶体管546a为pnp型的晶体管。电阻546b的一端连接于晶体管546a的发射极,其另一端连接于晶体管546a的基极。电阻546c的一端连接于晶体管546a的基极,其另一端连接于模式切换开关98的自动模式端子98c。电阻546d的一端连接于行进方向切换开关102的行进方向端子102b,其另一端连接于晶体管546a的集电极。另外,晶体管546a的发射极连接于电源电位,晶体管546a的集电极经由电阻578而连接于电源电位,且连接于主mcu434。
169.在自动模式端子98c为h电位的情况下,晶体管546a断开,晶体管546a的集电极如果在行进方向切换开关102处选择了前进,则为h电位,如果在行进方向切换开关102处选择了后退,则为l电位。这种情况下,主mcu434基于被输入的电位,对选择了前进与后退的哪一种进行识别。在自动模式端子98c为l电位的情况下,晶体管546a接通,晶体管546a的集电极为h电位,而与在行进方向切换开关102处选择了前进与后退的哪一种无关。即,在模式切换开关98处选择了自动模式的情况下,消除电路546取消来自行进方向切换开关102的输入信号。
170.紧急停止开关308的紧急停止端子308b经由not门562而连接于and门552的第1输入端子。碰撞监测开关532的碰撞监测端子532b经由not门562而连接于or门556的第1输入端子。消除电路546的晶体管546a的集电极经由not门564而连接于or门556的第2输入端子。or门556的输出端子连接于and门552的第2输入端子。and门552的输出端子连接于and门550的第2输入端子,而且还连接于切断电路442。如后面叙述的那样,在and门552的输出端子为h电位的情况下,切断电路442允许向马达驱动器462供给电力,在and门552的输出端子为l电位的情况下,切断向马达驱动器462供给电力。
171.在紧急停止端子308b为h电位的情况下,and门552的输出端子为l电位,而与or门556的输出端子的电位无关。因此,在紧急停止开关308接通的情况下,l电位被输入于and门550的第2输入端子,而且l电位从切换电路436被输入于切断电路442,而与模式切换开关98或碰撞监测开关530、532、行进方向切换开关102的状态无关。
172.在紧急停止端子308b为l电位,l电位被输入于or门556的第2输入端子的情况下,如果碰撞监测端子532b为l电位,则or门556的输出端子与and门552的输出端子为h电位,如果碰撞监测端子532b为h电位,则or门556的输出端子与and门552的输出端子为l电位。因此,当碰撞监测开关530、532没有监测到碰撞时,and门550的第2输入端子为h电位,h电位从切换电路436被输入于切断电路442。当碰撞监测开关530、532监测到了碰撞时,l电位被输入于and门550的第2输入端子,l电位从切换电路436被输入于切断电路442。即,由碰撞监测开关530、532实施的碰撞监测被有效化。
173.在紧急停止端子308b为l电位,h电位被输入于or门556的第2输入端子的情况下,or门556的输出端子与and门552的输出端子为h电位,而与碰撞监测端子532b的电位无关。
因此,h电位被输入于and门550的第2输入端子,h电位从切换电路436被输入于切断电路442,而与碰撞监测开关530、532的状态无关。即,由碰撞监测开关530、532实施的碰撞监测被无效化。
174.在自动模式端子98c为h电位的情况下,由于消除电路546的晶体管546a断开,因此,如果行进方向端子102b为h电位,l电位被输入于or门556的第2输入端子,如果行进方向端子102b为l电位,则h电位被输入于or门556的第2输入端子。即,在模式切换开关98处没有选择自动模式的情况下,当在行进方向切换开关102处选择了前进时,由碰撞监测开关530、532实施的碰撞监测被有效化,当在行进方向切换开关102处选择了后退时,由碰撞监测开关530、532实施的碰撞监测被无效化。
175.在自动模式端子98c为l电位的情况下,由于消除电路546的晶体管546a接通,因此,l电位被输入于or门556的第2输入端子,而与行进方向端子102b的电位无关。即,在模式切换开关98处选择了自动模式的情况下,由碰撞监测开关530、532实施的碰撞监测被有效化,而与行进方向切换开关102的状态无关。
176.(切断电路438的构成)
177.如图32所示,切断电路438具备:开关元件438a、驱动器ic438b、以及and门438c。开关元件438a例如为电场效应晶体管,详细而言为具有绝缘门的n沟道型的mosfet。开关元件438a的漏极连接于控制电源电路432的蓄电池电位(vbat)输出,开关元件438a的源极连接于马达驱动器454、456、458、460,开关元件438a的门连接于驱动器ic438b。and门438c的第1输入端子连接于切换电路436,and门438c的第2输入端子连接于主mcu434,and门438c的输出端子连接于驱动器ic438b。在and门438c的输出端子为h电位的情况下,亦即在and门438c的第1输入端子与第2输入端子双方为h电位的情况下,驱动器ic438b使开关元件438a导通。在and门438c的输出端子为l电位的情况下,亦即在and门438c的第1输入端子与第2输入端子的一方或者双方为l电位的情况下,驱动器ic438b使开关元件438a不导通。
178.(马达驱动器454、456、458、460的构成)
179.马达驱动器454、456、458、460经由u相输出端子、v相输出端子以及w相输出端子而与右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492连接。另外,马达驱动器454、456、458、460经由制动电路输出端子而与制动电路468、470、472、474连接。
180.马达驱动器454、456、458、460具备:第1开关元件454a、456a、458a、460a、第2开关元件454b、456b、458b、460b、第3开关元件454c、456c、458c、460c、第4开关元件454d、456d、458d、460d、第5开关元件454e、456e、458e、460e、第6开关元件454f、456f、458f、460f、第1二极管454g、456g、458g、460g、第2二极管454h、456h、458h、460h、以及第3二极管454i、456i、458i、460i。第1开关元件454a、456a、458a、460a、第2开关元件454b、456b、458b、460b、第3开关元件454c、456c、458c、460c、第4开关元件454d、456d、458d、460d、第5开关元件454e、456e、458e、460e、以及第6开关元件454f、456f、458f、460f例如为电场效应晶体管,详细而言为:具有绝缘门的n沟道型的mosfet。
181.第1开关元件454a、456a、458a、460a的漏极连接于切断电路438的开关元件438a的源极,第1开关元件454a、456a、458a、460a的源极连接于u相输出端子,第1开关元件454a、456a、458a、460a的门连接于马达mcu444、446、448、450。第2开关元件454b、456b、458b、460b的漏极连接于u相输出端子,第2开关元件454b、456b、458b、460b的源极连接于接地电位,第
2开关元件454b、456b、458b、460b的门连接于马达mcu444、446、448、450。
182.第3开关元件454c、456c、458c、460c的漏极连接于切断电路438的开关元件438a的源极,第3开关元件454c、456c、458c、460c的源极连接于v相输出端子,第3开关元件454c、456c、458c、460c的门连接于马达mcu444、446、448、450。第4开关元件454d、456d、458d、460d的漏极连接于v相输出端子,第4开关元件454d、456d、458d、460d的源极连接于接地电位,第4开关元件454d、456d、458d、460d的门连接于马达mcu444、446、448、450。
183.第5开关元件454e、456e、458e、460e的漏极连接于切断电路438的开关元件438a的源极,第5开关元件454e、456e、458e、460e的源极连接于w相输出端子,第5开关元件454e、456e、458e、460e的门连接于马达mcu444、446、448、450。第6开关元件454f、456f、458f、460f的漏极连接于w相输出端子,第6开关元件454f、456f、458f、460f的源极连接于接地电位,第6开关元件454f、456f、458f、460f的门连接于马达mcu444、446、448、450。
184.右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492的霍尔传感器482、484、488、494的检测信号被输入于马达mcu444、446、448、450。马达mcu444、446、448、450根据来自霍尔传感器482、484、488、494的检测信号,来切换第1开关元件454a、456a、458a、460a、第2开关元件454b、456b、458b、460b、第3开关元件454c、456c、458c、460c、第4开关元件454d、456d、458d、460d、第5开关元件454e、456e、458e、460e、第6开关元件454f、456f、458f、460f的接通/断开,由此,能够以所希望的旋转速度而使右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492进行动作。另外,马达mcu444、446、448、450通过将第2开关元件454b、456b、458b、460b、第4开关元件454d、456d、458d、460d、以及第6开关元件454f、456f、458f、460f切换为接通,能够利用所谓的短路制动,对右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492的旋转进行制动。
185.第1二极管454g、456g、458g、460g的阳极连接于u相输出端子,第1二极管454g、456g、458g、460g的阴极连接于制动电路输出端子。第2二极管454h、456h、458h、460h的阳极连接于v相输出端子,第2二极管454h、456h、458h、460h的阴极连接于制动电路输出端子。第3二极管454i、456i、458i、460i的阳极连接于w相输出端子,第3二极管454i、456i、458i、460i的阴极连接于制动电路输出端子。
186.(制动电路468、470、472、474的构成)
187.制动电路468、470、472、474具备:开关元件468a、470a、472a、474a、电阻468b、470b、472b、474b、放大器468c、470c、472c、474c、运算放大器468d、470d、472d、474d、以及热敏电阻468e、470e、472e、474e。
188.开关元件468a、470a、472a、474a例如为电场效应晶体管,详细而言为具有绝缘门的n沟道型的mosfet。开关元件468a、470a、472a、474a的漏极连接于马达驱动器454、456、458、460的制动电路输出端子,开关元件468a、470a、472a、474a的源极经由电阻468b、470b、472b、474b而连接于接地电位,开关元件468a、470a、472a、474a的门连接于运算放大器468d、470d、472d、474d的输出端子。开关元件468a、470a、472a、474a根据门电压的大小,能够进行线性模式和开关模式下的动作,且该线性模式为:当门电压发生变动时漏极电流也大致呈线性变动的模式,该开关模式为:即便门电压发生变动,漏极电流也不怎么变动的模式。
189.放大器468c、470c、472c、474c对电阻468b、470b、472b、474b的一端与另一端之间
的电压进行检测,并对所检测到的电压进行放大,并输出给运算放大器468d、470d、472d、474d的反相输入端子。运算放大器468d、470d、472d、474d的非反相输入端子连接于马达mcu444、446、448、450。运算放大器468d、470d、472d、474d将从马达mcu444、446、448、450输入于非反相输入端子的电流指令值、与从放大器468c、470c、472c、474c输入于反相输入端子的电流检测值之差所对应的电压外加给开关元件468a、470a、472a、474a的门。据此,开关元件468a、470a、472a、474a以线性模式进行动作,以与来自马达mcu444、446、448、450的电流指令值相对应的电流流经于电阻468b、470b、472b、474b的方式对开关元件468a、470a、472a、472a的动作进行控制。即,制动电路468、470、472、474可以作为线性调节器。
190.在右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492进行旋转时,一旦有大电流从马达驱动器454、456、458、460流向制动电路468、470、472、474,就会有强大的制动力作用于右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492。因此,在右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492的旋转过程中,马达mcu444、446、448、450能够通过制动电路468、470、472、474而使较大的制动力作用于右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492。
191.当通过制动电路468、470、472、474而使制动力作用于右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492时,由于有大电流流经于开关元件468a、470a、472a、472a与电阻468b、470b、472b、474b,所以,制动电路468、470、472、474的温度会因为发热而上升。因此,马达mcu444、446、448、450在使制动电路468、470、472、474进行动作之时,对冷却风扇50d、52d、54d、56d进行驱动,来对制动电路468、470、472、474进行冷却。另外,在马达mcu444、446、448、450连接有热敏电阻468e、470e、472e、474e。热敏电阻468e、470e、472e、474e对制动电路468、470、472、474的温度进行检测,并输出给马达mcu444、446、448、450。
192.另外,制动电路468、470、472、474也可以构成为:准备出多个(例如6个)开关元件468a、470a、472a、474a、电阻468b、470b、472b、474b、放大器468c、470c、472c、474c、运算放大器468d、470d、472d、474d、以及热敏电阻468e、470e、472e、474e的组,将它们相互地并联连接起来。通过采用如此的构成,能够使更大的电流从马达驱动器454、456、458、460流向制动电路468、470、472、474,从而能够使更大的制动力作用于右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492。
193.(切断电路440的构成)
194.如图33所示,切断电路440具备:开关元件440a、驱动器ic440b、以及and门440c。开关元件440a例如为电场效应晶体管,详细而言为:具有绝缘门的n沟道型的mosfet。开关元件440a的漏极连接于控制电源电路432的蓄电池电位(vbat)输出,开关元件440a的源极连接于电磁制动驱动器464、466,开关元件440a的门连接于驱动器ic440b。and门440c的第1输入端子连接于切换电路436,and门440c的第2输入端子连接于主mcu434,and门440c的输出端子连接于驱动器ic440b。在and门440c的输出端子为h电位的情况下,亦即在and门440c的第1输入端子与第2输入端子双方为h电位的情况下,驱动器ic440b使开关元件440a导通。在and门440c的输出端子为l电位的情况下,亦即在and门440c的第1输入端子与第2输入端子的一方或者双方为l电位的情况下,驱动器ic440b使开关元件440a不导通。
195.(电磁制动驱动器464、466的构成)
196.电磁制动驱动器464、466经由正极输出端子以及负极输出端子而与右后轮电磁制
动器490、左后轮电磁制动器496连接。电磁制动驱动器464、466具备:开关元件464a、466a以及二极管464b、466b。
197.开关元件464a、466a例如为电场效应晶体管,详细而言为:具有绝缘门的n沟道型的mosfet。开关元件464a、466a的漏极连接于负极输出端子,开关元件464a、466a的源极连接于接地电位,开关元件464a、466a的门连接于马达mcu448、450。二极管464b、466b的阳极连接于负极输出端子,二极管464b、466b的阴极连接于正极输出端子。
198.右后轮电磁制动器490、左后轮电磁制动器496在正极输出端子与负极输出端子之间没有被外加电压的情况下,使制动力作用于右后轮马达486、左后轮马达492,当在正极输出端子与负极输出端子之间被外加电压时,就会解除针对右后轮马达486、左后轮马达492的制动力。在切断电路440的开关元件440a接通的状态下,马达mcu448、450将电磁制动驱动器464、466的开关元件464a、466a接通时,蓄电池电压(vbat)被外加在正极输出端子与负极输出端子之间,从而解除右后轮电磁制动器490、左后轮电磁制动器496的制动力。另外,二极管464b、466b吸收:来自右后轮电磁制动器490、左后轮电磁制动器496的反向浪涌(
バックサージ
)。
199.(切断电路442的构成)
200.如图34所示,切断电路442具备:开关元件442a、驱动器ic442b、以及and门442c。开关元件442a例如为电场效应晶体管,详细而言为:具有绝缘门的n沟道型的mosfet。开关元件442a的漏极连接于控制电源电路432的蓄电池电位(vbat)输出,开关元件442a的源极连接于马达驱动器462,开关元件442a的门连接于驱动器ic442b。and门442c的第1输入端子连接于切换电路436,and门442c的第2输入端子连接于主mcu434,and门442c的输出端子连接于驱动器ic442b。在and门442c的输出端子为h电位的情况下,亦即在and门442c的第1输入端子与第2输入端子双方为h电位的情况下,驱动器ic442b使开关元件442a导通。在and门442c的输出端子为l电位的情况下,亦即在and门442c的第1输入端子与第2输入端子的一方或者双方为l电位的情况下,驱动器ic442b使开关元件442a不导通。
201.(马达驱动器462的构成)
202.马达驱动器462经由u相输出端子、v相输出端子以及w相输出端子而与转向马达176连接。马达驱动器462具备:第1开关元件462a、第2开关元件462b、第3开关元件462c、第4开关元件462d、第5开关元件462e、以及第6开关元件462f。第1开关元件462a、第2开关元件462b、第3开关元件462c、第4开关元件462d、第5开关元件462e、以及第6开关元件462f例如为电场效应晶体管,详细而言为:具有绝缘门的n沟道型的mosfet。
203.第1开关元件462a的漏极连接于切断电路442的开关元件442a的源极,第1开关元件462a的源极连接于u相输出端子,第1开关元件462a的门连接于马达mcu452。第2开关元件462b的漏极连接于u相输出端子,第2开关元件462b的源极连接于接地电位,第2开关元件462b的门连接于马达mcu452。
204.第3开关元件462c的漏极连接于切断电路442的开关元件442a的源极,第3开关元件462c的源极连接于v相输出端子,第3开关元件462c的门连接于马达mcu452。第4开关元件462d的漏极连接于v相输出端子,第4开关元件462d的源极连接于接地电位,第4开关元件462d的门连接于马达mcu452。
205.第5开关元件462e的漏极连接于切断电路442的开关元件442a的源极,第5开关元
件462e的源极连接于w相输出端子,第5开关元件462e的门连接于马达mcu452。第6开关元件462f的漏极连接于w相输出端子,第6开关元件462f的源极连接于接地电位,第6开关元件462f的门连接于马达mcu452。
206.转向马达176的霍尔传感器480的检测信号被输入于马达mcu452。马达mcu452根据来自霍尔传感器480的检测信号,对第1开关元件462a、第2开关元件462b、第3开关元件462c、第4开关元件462d、第5开关元件462e、以及第6开关元件462f的接通/断开进行切换,由此,能够以所希望的旋转速度而使转向马达176进行动作。另外,马达mcu452通过将第2开关元件462b、第4开关元件462d、以及第6开关元件462f切换为接通,能够利用所谓的短路制动,对转向马达176的旋转进行制动。
207.(主mcu434进行的处理)
208.当搬运车2的主电源接通时,主mcu434执行图35-图37所示的处理。
209.如图35所示,在s2,主mcu434将温度保护标志设定为0。
210.在s4,主mcu434判断:是否利用过载监测传感器320a、320b、320c、320d的任何1个来对过载进行监测。在对过载进行监测的情况下(yes的情况下),处理进入于s6。在s6,主mcu434将过载监测标志设定为1。在s4不对过载进行监测的情况下(no的情况下),处理进入于s8。在s8,主mcu434将过载监测标志设定为0。在s6或者s8之后,处理进入于s10。
211.在s10,主mcu434判断:是否利用碰撞监测开关530、532的任何1个来对碰撞进行监测。在对碰撞进行监测的情况下(yes的情况下),处理进入于s12。在s12,主mcu434将碰撞监测标志设定为1。在s10不对碰撞进行监测的情况下(no的情况下),处理进入于s14。在s14,主mcu434将碰撞监测标志设定为0。在s12或者s14之后,处理进入于s16。
212.在s16,主mcu434判断:利用热敏电阻468e、470e、472e、474e检测到的制动电路温度t是否超过了温度保护阈值t1。在制动电路温度t超过了温度保护阈值t1的情况下(yes的情况下),处理进入于s18。在s18,主mcu434将温度保护标志设定为1。在s18之后,处理进入于s20,在s16制动电路温度t没有超过温度保护阈值t1的情况下(no的情况下),处理进入于s20。
213.在s20,主mcu434判断:是否在模式切换开关98出选择了手动模式。在选择了手动模式的情况下(yes的情况下),处理进入于s34(参照图36)。在没有选择手动模式的情况下(no的情况下),处理进入于s22。
214.在s22,主mcu434判断:是否在模式切换开关98出选择了自动模式。在选择了自动模式的情况下(yes的情况下),处理进入于s72(参照图37)。在没有选择自动模式的情况下(no的情况下),处理进入于s24。
215.在模式切换开关98处手动模式和自动模式都没有被选择的情况下,亦即在模式切换开关98处选择了停车模式的情况下,执行s24的处理。在s24,主mcu434将搬运车2的目标行进速度v设定为0km/h,将搬运车2的目标回转角度θ设定为0
°
。在s26,主mcu434向切断电路438、440、442发送通电禁止信号。
216.在s28,主mcu434根据目标行进速度v与目标回转角度θ,计算出:针对右前轮马达232、左前轮马达242、右后轮马达486、以及左后轮马达492的旋转速度指令值、以及针对转向马达176的转向角指令值。
217.在s30,主mcu434将针对右前轮马达232、左前轮马达242、右后轮马达486、左后轮
马达492的旋转速度指令值、以及针对转向马达176的转向角指令值向马达mcu444、446、448、450、452发送。
218.在s32,主mcu434从马达mcu444、446、448、450、452接收状态信号。在s32之后,处理返回到s2。
219.(手动模式下的主mcu434的处理)
220.在模式切换开关98处选择了手动模式的情况下,执行图36所示的s34的处理。在s34,主mcu434基于从触发器开关100输入的触发器开关100的按入量,判断:触发器开关100是否被进行了接通操作。在触发器开关100被进行了接通操作的情况下(yes的情况下),处理进入于s36。在s36,主mcu434向切断电路438、440、442发送通电许可信号。在s36之后,处理进入于s46。
221.在s34,触发器开关100没有被进行接通操作的情况下(no的情况下),处理进入于s38。在s38,主mcu434将搬运车2的目标行进速度v设定为0km/h,将搬运车2的目标回转角度θ设定为0
°
。
222.在s40,主mcu434向切断电路438、440、442发送通电禁止信号。
223.在s42,主mcu434判断:利用热敏电阻468e、470e、472e、474e检测到的制动电路温度t是否低于温度保护解除阈值t2。在制动电路温度t低于温度保护解除阈值t2的情况下(yes的情况下),处理进入于s44。在s42制动电路温度t达到温度保护解除阈值t2个以上的情况下(no的情况下),处理进入于s28(参照图35)。
224.在模式切换开关98处选择手动模式,搬运车2的目标行进速度v被设定为0km/h,从主mcu434向切断电路438、440、442发送通电禁止信号(亦即、搬运车2停止),而且制动电路温度t低于温度保护解除阈值t2的情况下,执行s44的处理。在s44,主mcu434将温度保护标志设定为0。在s44之后,处理进入于s28(参照图35)。
225.在s46,主mcu434判断:是否在行进方向切换开关102处选择了前进。在选择了前进的情况下(yes的情况下),处理进入于s48。
226.在s48,主mcu434判断:碰撞监测标志是否为0。在碰撞监测标志为0的情况下(yes的情况下),处理进入于s50。
227.在s50,主mcu434判断:过载监测标志是否为0。在碰撞监测标志为0的情况下(yes的情况下),处理进入于s52。
228.在s52,主mcu434判断:温度保护标志是否为0。在温度保护标志为0的情况下(yes的情况下),处理进入于s54。
229.在s54,主mcu434将搬运车2的上限行进速度设定为第1上限行进速度(例如5km/h)。在s54之后,处理进入于s58。
230.在s50过载监测标志为1的情况下(no的情况下)、或者在s52温度保护标志为1的情况下(no的情况下),处理进入于s56。在s56,主mcu434将搬运车2的上限行进速度设定为比第1上限行进速度小的第2上限行进速度(例如1km/h)。在s56之后,处理进入于s58。
231.在s58,主mcu434基于从触发器开关100输入的触发器开关100的按入量,来确定搬运车2的目标行进速度v。此时,在基于触发器开关100的按入量而被确定的目标行进速度v是在s54、s56设定的上限行进速度以上的情况下,主mcu434使目标行进速度v与上限行进速度一致。
232.在s60,主mcu434基于从转动角度传感器88输入的车把手轴84的转动角度,来确定搬运车2的目标回转角度θ。在s60之后,处理进入于s28(参照图35)。
233.在s48碰撞监测标志为1的情况下(no的情况下),处理进入于s62。在模式切换开关98处选择了手动模式,在行进方向切换开关102处选择了前进,而且碰撞监测标志为1的情况下,执行s62的处理。在s62,主mcu434将搬运车2的目标行进速度v设定为0km/h,将搬运车2的目标回转角度θ设定为0
°
。在s64,主mcu434向切断电路438、440、442发送通电禁止信号。在s64之后,处理进入于s28(参照图35)。
234.在s46,在行进方向切换开关102处选择了后退的情况下(no的情况下),处理进入于s66。在模式切换开关98处选择了手动模式,在行进方向切换开关102处选择了后退的情况下,执行s66的处理。在s66,主mcu434将搬运车2的上限行进速度设定为第2上限行进速度(例如1km/h)。
235.在s68,主mcu434基于从触发器开关100输入的触发器开关100的按入量,来确定搬运车2的目标行进速度v。此时,在基于触发器开关100的按入量而被确定的目标行进速度v是在s66设定的上限行进速度以上的情况下,主mcu434使目标行进速度v与上限行进速度一致。
236.在s70,主mcu434基于从转动角度传感器88输入的车把手轴84的转动角度,来确定搬运车2的目标回转角度θ。在s70之后,处理进入于s28(参照图35)。
237.另外,s54的处理中的搬运车2的上限行进速度也可以根据速度切换开关104的操作而适当变更。例如,在利用速度切换开关104而将搬运车2的行进速度设定为高速的情况下,搬运车2的上限行进速度也可以设定为第1上限行进速度(例如5km/h),在利用速度切换开关104而将搬运车2的行进速度设定为中速的情况下,搬运车2的行进速度也可以设定为:小于第1上限行进速度、且大于第2上限行进速度的第3上限行进速度(例如3km/h),在利用速度切换开关104而将搬运车2的行进速度设定为低速的情况下,搬运车2的行进速度也可以设定为:小于第3上限行进速度、且大于第2上限行进速度的第4上限行进速度(例如1.5km/h)。
238.(自动模式下的主mcu434的处理)
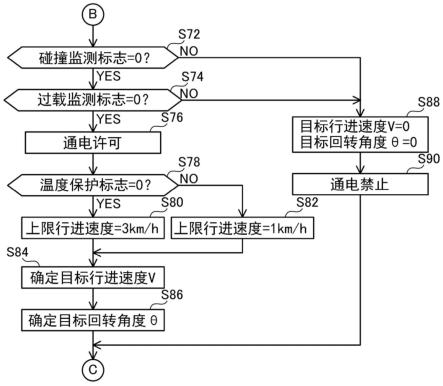
239.在模式切换开关98处选择了自动模式的情况下,执行图37所示的s72的处理。在s72,主mcu434判断:碰撞监测标志是否为0。在碰撞监测标志为0的情况下(yes的情况下),处理进入于s74。
240.在s74,主mcu434判断:过载监测标志是否为0。在碰撞监测标志为0的情况下(yes的情况下),处理进入于s76。
241.在s76,主mcu434向切断电路438、440、442发送通电许可信号。
242.在s78,主mcu434判断:温度保护标志是否为0。在温度保护标志为0的情况下(yes的情况下),处理进入于s80。在s80,主mcu434将搬运车2的上限行进速度设定为第3上限行进速度(例如3km/h)。在s80之后,处理进入于s84。
243.在s78,温度保护标志为1的情况下(no的情况下),处理进入于s82。在s82,主mcu434将搬运车2的上限行进速度设定为第2行进速度(例如1km/h)。在s82之后,处理进入于s84。
244.在s84,主mcu434基于来自自动运转mcu430的指令值,来确定搬运车2的目标行进
速度v。此时,在基于来自自动运转mcu430的指令值而被确定的目标行进速度v是在s80、s82设定的上限行进速度以上的情况下,主mcu434使目标行进速度v与上限行进速度一致。
245.在s86,主mcu434基于来自自动运转mcu430的指令值,来确定搬运车2的目标回转角度θ。在s86之后,处理进入于s28(参照图35)。
246.在s72碰撞监测标志为1的情况(no的情况下)、或者在s74中过载监测标志为1的情况下(no的情况下),处理进入于s88。在模式切换开关98处选择了自动模式、且碰撞监测标志为1的情况下,或者,在模式切换开关98处选择了自动模式、且过载监测标志为1的情况下,执行s88的处理。在s88,主mcu434将搬运车2的目标行进速度v设定为0km/h,将搬运车2的目标回转角度θ设定为0
°
。在s90,主mcu434向切断电路438、440、442发送通电禁止信号。在s90之后,处理进入于s28(参照图35)。
247.(马达mcu444、446进行的处理)
248.当搬运车2的主电源接通时,马达mcu444、446执行图38、图39所示的处理。
249.如图38所示,在s102,马达mcu444、446从主mcu434接收指令信号。
250.在s104,马达mcu444、446基于从主mcu434接收到的指令信号,来确定右前轮马达232、左前轮马达242的目标旋转速度rs1。
251.在s106,马达mcu444、446基于从霍尔传感器482、484接收到的检测信号,来确定右前轮马达232、左前轮马达242的当前的旋转速度rs2。
252.在s108,马达mcu444、446判断:在s104确定的目标旋转速度rs1是否大于在s106确定的当前的旋转速度rs2。在目标旋转速度rs1大于当前的旋转速度rs2的情况下(yes的情况下),处理进入于s110。
253.在s110,马达mcu444、446通过马达驱动器454、456而对右前轮马达232、左前轮马达242进行pwm控制,使右前轮马达232、左前轮马达242的旋转进行加速。另外,在s110,马达mcu444、446将0作为电流指令值而输入给制动电路468、470,来使制动电路468、470的动作无效化。
254.在s112,马达mcu444、446基于在s104确定的目标旋转速度rs1与在s106确定的当前的旋转速度rs2之差,来确定目标旋转加速度ra1。
255.在s114,马达mcu444、446基于从霍尔传感器482、484接收到的检测信号,来确定当前的旋转加速度ra2。
256.在s116,马达mcu444、446判断:在s112确定的目标旋转加速度ra1是否大于在s114确定的当前的旋转加速度ra2。在目标旋转加速度ra1高于当前的旋转加速度ra2的情况下(yes的情况下),处理进入于s118。在s118,马达mcu444、446增加:由马达驱动器454、456进行的右前轮马达232、左前轮马达242的pwm控制中的占空比。在s116,目标旋转加速度ra1为当前的旋转加速度ra2以下的情况下(no的情况下),处理进入于s120。在s120,马达mcu444、446降低:由马达驱动器454、456进行的右前轮马达232、左前轮马达242的pwm控制中的占空比。在s118或者s120之后,处理进入于s134(参照图39)。
257.在s108,目标旋转速度rs1为当前的旋转速度rs2以下的情况下(no的情况下),处理进入于s122。在s122,马达mcu444、446借助制动电路468、470而使右前轮马达232、左前轮马达242的旋转减速。另外,在s122,马达mcu444、446使马达驱动器454、456的动作无效化。
258.在s124,马达mcu444、446基于在s104确定的目标旋转速度rs1与在s106确定的当
前的旋转速度rs2之差,来确定目标旋转减速度rd1。
259.在s126,马达mcu444、446基于从霍尔传感器482、484接收到的检测信号,来确定当前的旋转减速度rd2。
260.在s128,马达mcu444、446判断:在s124确定的目标旋转减速度rd1是否低于在s126确定的当前的旋转减速度rd2。在目标旋转减速度rd1低于当前的旋转减速度rd2的情况下(yes的情况下),处理进入于s130。在s130,马达mcu444、446增加:针对制动电路468、470的电流指令值。在s128,目标旋转减速度rd1为当前的旋转减速度rd2以下的情况下(no的情况下),处理进入于s132。在s132,马达mcu444、446降低:针对制动电路468、470的电流指令值。在s130或者s132之后,处理进入于s134(参照图39)。
261.如图39所示,在s134,马达mcu444、446判断:利用热敏电阻468e、470e检测到的制动电路温度t是否超过了冷却开始温度t3。在制动电路温度t超过了冷却开始温度t3的情况下(yes的情况下),处理进入于s136。在s136,马达mcu444、446对冷却风扇50d、52d进行驱动,来对电气制动电路基板50、52进行冷却。在s136之后,处理进入于s138。在s134,制动电路温度t为冷却开始温度t3以下的情况下(no的情况下),处理进入于s138。
262.在s138,马达mcu444、446判断:利用热敏电阻468e、470e检测到的制动电路温度t是否低于比冷却开始温度t3低的冷却结束温度t4。在制动电路温度t低于冷却结束温度t4的情况下(yes的情况下),处理进入于s140。在s140,马达mcu444、446使冷却风扇50d、52d停止来结束电气制动电路基板50、52的冷却。在s140之后,处理进入于s142。在s138制动电路温度t为冷却结束温度t4以上的情况下(no的情况下),处理进入于s142。
263.在s142,马达mcu444、446向主mcu434发送状态信号。s142之后,处理返回到s102(参照图38)。
264.如上所述,马达mcu444、446基于利用热敏电阻468e、470e检测到的制动电路温度t,对冷却风扇50d、52d进行驱动来对电气制动电路基板50、52进行冷却。通过采用如此的构成,马达mcu444、446能够持续长时间地进行由制动电路468、470对右前轮马达232、左前轮马达242实施的制动。例如,马达mcu444、446能够持续地进行由制动电路468、470对右前轮马达232、左前轮马达242实施的制动15分钟以上,详细而言为
は
30分钟以上,更加详细而言为1小时以上。
265.(马达mcu448、450进行的处理)
266.当搬运车2的主电源接通时,马达mcu448、450执行图40、图41所示的处理。
267.如图40所示,在s152,马达mcu448、450从主mcu434接收指令信号。
268.在s154,马达mcu448、450基于从主mcu434接收到的指令信号,来确定右后轮马达486、左后轮马达492的目标旋转速度rs1。
269.在s156,马达mcu448、450基于从霍尔传感器488、494接收到的检测信号,来确定右后轮马达486、左后轮马达492的当前的旋转速度rs2。
270.在s158,马达mcu448、450判断:在s154确定的目标旋转速度rs1是否为下限旋转速度rs0以上。在目标旋转速度rs1为下限旋转速度rs0以上的情况下(yes的情况下),处理进入于s160。在s160,马达mcu448、450借助电磁制动驱动器464、466而使右后轮电磁制动器490、左后轮电磁制动器496断开。在s160之后,处理进入于s162。在目标旋转速度rs1低于下限旋转速度rs0的情况下(no的情况下),处理进入于s162。
271.在s162,马达mcu448、450判断:在s156确定的当前的旋转速度rs2是否为下限旋转速度rs0以下。在当前的旋转速度rs2为下限旋转速度rs0以下的情况下(yes的情况下),处理进入于s164。在s164,马达mcu448、450借助电磁制动驱动器464、466而将右后轮电磁制动器490、左后轮电磁制动器496接通。在s164之后,处理进入于s192(参照图41)。在当前的旋转速度rs2超过了下限旋转速度rs0的情况下(no的情况下),处理进入于s166。
272.在s166,马达mcu448、450判断:在s154确定的目标旋转速度rs1是否大于在s156确定的当前的旋转速度rs2。在目标旋转速度rs1大于当前的旋转速度rs2的情况下(yes的情况下),处理进入于s168。
273.在s168,马达mcu448、450通过马达驱动器458、460而对右后轮马达486、左后轮马达492进行pwm控制,来使右后轮马达486、左后轮马达492的旋转进行加速。另外,在s168,马达mcu448、450将0作为电流指令值而输入给制动电路472、474,来使制动电路472、474的动作无效化。
274.在s170,马达mcu448、450基于在s154确定的目标旋转速度rs1与在s156确定的当前的旋转速度rs2之差,来确定目标旋转加速度ra1。
275.在s172,马达mcu448、450基于从霍尔传感器488、494接收到的检测信号,来确定当前的旋转加速度ra2。
276.在s174,马达mcu448、450判断:在s170确定的目标旋转加速度ra1是否大于在s172确定的当前的旋转加速度ra2。在目标旋转加速度ra1高于当前的旋转加速度ra2的情况下(yes的情况下),处理进入于s176。在s176,马达mcu448、450增加:由马达驱动器458、460进行的右后轮马达486、左后轮马达492的pwm控制中的占空比。在s174,目标旋转加速度ra1为当前的旋转加速度ra2以下的情况下(no的情况下),处理进入于s178。在s178,马达mcu448、450降低:由马达驱动器458、460进行的右后轮马达486、左后轮马达492的pwm控制中的占空比。在s176或者s178之后,处理进入于s192(参照图41)。
277.在s166,目标旋转速度rs1为当前的旋转速度rs2以下的情况下(no的情况下),处理进入于s180。在s180,马达mcu448、450借助制动电路472、474而使右后轮马达486、左后轮马达492的旋转减速。另外,在s180,马达mcu448、450使马达驱动器458、460的动作无效化。
278.在s182,马达mcu448、450基于在s154确定的目标旋转速度rs1与在s156确定的当前的旋转速度rs2之差来确定目标旋转减速度rd1。
279.在s184,马达mcu448、450基于从霍尔传感器488、494接收到的检测信号,来确定当前的旋转减速度rd2。
280.在s186,马达mcu448、450判断:在s182确定的目标旋转减速度rd1是否低于在s184确定的当前的旋转减速度rd2。在目标旋转减速度rd1低于当前的旋转减速度rd2的情况下(yes的情况下),处理进入于s188。在s188,马达mcu448、450增加针对制动电路472、474的电流指令值。在s186,目标旋转减速度rd1为当前的旋转减速度rd2以下的情况下(no的情况下),处理进入于s190。在s190,马达mcu448、450降低针对制动电路472、474的电流指令值。在s188或者s190之后,处理进入于s192(参照图41)。
281.如图41所示,在s192,马达mcu448、450判断:利用热敏电阻472e、474e检测到的制动电路温度t是否超过了冷却开始温度t3。在制动电路温度t超过了冷却开始温度t3的情况下(yes的情况下),处理进入于s194。在s194,马达mcu448、450对冷却风扇54d、56d进行驱
动,来对电气制动电路基板54、56进行冷却。在s194之后,处理进入于s196。在s192,制动电路温度t为冷却开始温度t3以下的情况下(no的情况下),处理进入于s196。
282.在s196,马达mcu448、450判断:利用热敏电阻472e、474e检测到的制动电路温度t是否低于冷却结束温度t4。在制动电路温度t低于冷却结束温度t4的情况下(yes的情况下),处理进入于s198。在s198,马达mcu448、450使冷却风扇54d、56d停止而结束电气制动电路基板54、56的冷却。在s198之后,处理进入于s200。在s196制动电路温度t为冷却结束温度t4以上的情况下(no的情况下),处理进入于s200。
283.在s200,马达mcu448、450向主mcu434发送状态信号。在s200之后,处理返回到s152(参照图40)。
284.图42表示搬运车2以手动模式在平地以及下坡上行驶的情况下的行进速度、制动电流、制动电路温度的经时变化的例子。在图42所示的例子中,在模式切换开关98处选择了手动模式,在前进/后退切换开关处选择了前进。当在时刻t1,触发器开关100从断开向接通切换时,通过电磁制动驱动器464、466,解除右后轮电磁制动器490、左后轮电磁制动器496,马达驱动器454、456、458、460对右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492进行驱动,搬运车2开始前进。当在时刻t2,搬运车2的行进速度达到第1上限行进速度时,制动电路468、470、472、474进行动作,电气制动作用于右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492。即便搬运车2从平地向下坡移动,通过制动电路468、470、472、474进行动作,搬运车2的行进速度也会被维持为第1上限行进速度。另外,通过制动电路468、470、472、474进行动作,制动电路468、470、472、474的温度会上升下去。当在时刻t3,制动电路468、470、472、474的温度超过温度保护阈值t1时,搬运车2的上限行进速度从第1上限行进速度向第2上限行进速度切换,制动电路468、470、472、474使更强的电气制动作用于右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492。据此,虽然搬运车2的行进速度降低下去了,但制动电路468、470、472、474的温度更加急剧上升。当在时刻t4,搬运车2的行进速度降低到第2上限行进速度时,制动电路468、470、472、474使作用于右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492的电气制动变弱,由此,制动电路468、470、472、474的温度就会下降。制动电路468、470、472、474的温度低于温度保护阈值t1,即便进一步低于温度保护解除阈值t2,直至搬运车2停止为止温度保护也不会被解除,搬运车2的上限行进速度被维持在第2上限行进速度而保持不变。当在时刻t5,触发器开关100从接通向断开切换时,通过制动电路468、470、472、474,使较强的电气制动作用于右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492。当在时刻t6搬运车2停止时,温度保护被解除,搬运车2的上限行进速度从第2上限行进速度向第1上限行进速度切换。另外,当在时刻t6搬运车2停止时,结束制动电路468、470、472、474实施的电气制动,由马达驱动器454、456、458、460实施的短路制动作用于右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492,此后,通过右后轮电磁制动器490和左后轮电磁制动器496,使得右后轮252和左后轮272锁止。在由制动电路468、470、472、474实施的电气制动结束之后,制动电路468、470、472、474的温度下降。此后,当在时刻t7触发器开关100再次从断开向接通切换时,通过电磁制动驱动器464、466将右后轮电磁制动器490、左后轮电磁制动器496解除,马达驱动器454、456、458、460对右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492进行驱动,搬运车2开始前进。当时刻t8时的搬运车2的行进速度达到第1上限行进速度
时,制动电路468、470、472、474进行动作,电气制动作用于右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492。
285.(马达mcu452进行的处理)
286.当搬运车2的主电源接通时,马达mcu452执行图43所示的处理。
287.在s202,马达mcu452从主mcu434接收指令信号。
288.在s204,马达mcu452基于从主mcu434接收到的指令信号,来确定转向单元10的目标转向角δ。
289.在s206,马达mcu452基于从转向角传感器166接收到的检测信号,来确定转向单元10的当前的转向角γ。
290.在s208,马达mcu452判断:在s204确定的目标转向角δ与在s206确定的当前的转向角γ是否一致。在目标转向角δ与当前的转向角γ不一致的情况下(no的情况下),处理进入于s210。
291.在s210,马达mcu452基于在s204确定的目标转向角δ与在s206确定的当前的转向角γ之差,来确定转向马达176的目标旋转速度pr1。
292.在s212,马达mcu452按照转向马达176以在s210确定的目标旋转速度pr1进行旋转的方式,通过借助于马达驱动器462进行的pwm控制来对转向马达176进行驱动。在s212之后,处理进入于s216。
293.在s208目标转向角δ与当前的转向角γ一致的情况下(yes的情况下),处理进入于s214。在s214,马达mcu452借助马达驱动器462而对转向马达176实施短路制动。在s214之后,处理进入于s216。
294.在s216,马达mcu452向主mcu434发送状态信号。在s216之后,处理返回到s202。
295.(变形例)
296.在上述的实施例中,右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492也可以是:组装于右前轮192、左前轮212、右后轮252、左后轮272的轮内马达(未图示)。
297.在上述的实施例中,转向马达176、右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492既可以是外转子型的无刷dc马达,也可以是有刷dc马达,还可以是ac马达,又可以是其它种类的马达。
298.在上述的实施例中,马达mcu444、446、448、450、452也可以替换霍尔传感器482、484、488、494、480,而使用对右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492、转向马达176的感应电压进行检测的电路,来对右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492、转向马达176的旋转速度进行检测。
299.在上述的实施例中,也可以构成为:替换前轮单元12或后轮单元14,而通过攀爬单元来使搬运车2进行移动,其中,该攀爬单元具备:前后并排配置的驱动轮及随动轮、架设于驱动轮及随动轮的皮带、以及使驱动轮进行旋转的马达。
300.在上述的实施例中,转向单元10也可以构成为:替换转向马达176而使用其它种类的致动器,来使转向轴168进行转动。
301.在上述的实施例,保险杠单元16设置在搬运车2的前方,碰撞监测开关530、532对来自搬运车2的前方的碰撞进行监测。也可以与之不同地构成为:保险杠单元16设置在搬运车2的后方,碰撞监测开关530、532对来自搬运车2的后方的碰撞进行监测。或者,也可以构
成为:将2个保险杠单元16分别设置在搬运车2的前方和后方,各个保险杠单元16的碰撞监测开关530、532分别对来自搬运车2的前方和后方的碰撞进行监测。也可以在保险杠单元16被设置在搬运车2的后方,碰撞监测开关530、532对来自搬运车2的后方的碰撞进行监测的情况下,且在图36的s46选择了前进的情况下(yes的情况下),处理进入于s50,在s46选择了后退的情况下(no的情况下),处理进入于s48,在s48碰撞监测标志为0的情况下(yes的情况下),处理进入于s66,在s48碰撞监测标志为1的情况下(no的情况下),处理进入于s62。
302.在上述的实施例中,车把手单元8也可以具备:可动凸轮部件90、固定凸轮部件92、螺旋弹簧94、覆盖车把手轴84的一部分的盖部件(未图示)。这种情况下,固定部件82也可以构成盖部件的一部分。
303.在上述的实施例中,车把手单元8也可以替换螺旋弹簧94而具备其它种类的弹性部件。另外,车把手单元8也可以具备:使衰减力作用于车把手轴84的转动的减震器(未图示)。
304.在上述的实施例中,虽然说明了过载监测传感器320a、320b、320c、320d、380为光电耦合器件的情况,但过载监测传感器320a、320b、320c、320d、380既可以是对有无由监测部348a、348b、348c、348d、416进行的光反射进行检测的光反射器,也可以是对来自在监测部348a、348b、348c、348d、416设置的磁铁的磁气进行检测的磁气传感器,还可以是其它种类的非接触式的监测传感器。或者,过载监测传感器320a、320b、320c、320d、380也可以是接触式的监测传感器。
305.在上述的实施例中,虽然说明了制动电路468、470、472、474的开关元件468a、470a、472a、474a是n沟道型的mosfet的情况,但开关元件468a、470a、472a、474a既可以是p沟道型的mosfet,也可以是igbt,还可以是双极性晶体管,又可以是其它种类的晶体管。或者,开关元件468a、470a、474a、472a也可以是晶闸管等其它种类的电子可变电阻元件。开关元件468a、470a、472a、474a既可以由si半导体构成,也可以由sic半导体构成,还可以由gan半导体构成,又可以由其它种类的半导体构成。
306.如上所述,在1个或其以上的实施方式中,搬运车2具备:右前轮192、左前轮212、右后轮252、左后轮272(驱动轮的例子);右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492(马达的例子),其使右前轮192、左前轮212、右后轮252、左后轮272进行旋转;马达驱动器454、456、458、460(马达驱动电路的例子),其构成为对右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492进行驱动;主mcu434及马达mcu444、446、448、450(控制单元的例子),其构成为借助马达驱动器454、456、458、460而对右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492进行控制,以使得搬运车2的行进速度为上限行进速度以下;以及触发器开关100(操作部件的例子),其设置于搬运车2,接受由用户进行的操作;搬运车2可以以手动模式和自动模式进行动作,该手动模式为:在触发器开关100被接通的情况下,右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492进行驱动,在触发器开关100被断开的情况下,右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492停止的模式;该自动模式为:不论触发器开关100是接通还是断开,右前轮马达232、左前轮马达242、右后轮马达486、左后轮马达492都进行驱动的模式。自动模式下的上限行进速度(例如3km/h)被设定为:低于手动模式下的上限行进速度(例如5km/h)。
307.根据上述的构成,由于搬运车2以自动模式进行动作之时的上限行进速度被设定
为:低于搬运车2以手动模式进行动作之时的上限行进速度,因此,能够更加提高搬运车2以自动模式进行动作之时的安全性。
308.在1个或其以上的实施方式中,搬运车2还具备:对货物的过载进行检测的过载监测传感器320a、320b、320c、320d。在自动模式下,当通过过载监测传感器320a、320b、320c、320d监测到了过载时,禁止搬运车2的行驶。在手动模式下,即便通过过载监测传感器320a、320b、320c、320d监测到了过载,也允许搬运车2的行驶。
309.根据上述的构成,由于在手动模式下,即便监测到过载,也允许搬运车2的行驶,而在自动模式下,当监测到过载时,就禁止搬运车2的行驶,因此,能够更加提高搬运车2以自动模式进行动作之时的安全性。
310.在1个或其以上的实施方式中,搬运车2还具备:对来自前方的与搬运车2的碰撞进行监测的碰撞监测开关530、532(碰撞监测传感器的例子)。自动模式下,在搬运车2向后方移动时,当通过碰撞监测开关530、532监测到了碰撞时,禁止搬运车2的行驶。手动模式下,在搬运车2向后方移动时,即便通过碰撞监测开关530、532监测到了碰撞,也允许搬运车2的行驶。
311.根据上述的构成,手动模式下,在搬运车2向后方移动时,即便监测到了来自搬运车2前方的碰撞的情况下,也允许搬运车2的行驶,而在自动模式下,在搬运车2向后方移动时,监测到了来自搬运车2前方的碰撞的情况下,禁止搬运车2的行驶,因此,能够更加提高搬运车2以自动模式进行动作之时的安全性。
312.在1个或其以上的实施方式中,搬运车2还具备:对来自后方的与搬运车2的碰撞进行监测的碰撞监测开关530、532(碰撞监测传感器的例子)。自动模式下,在搬运车2向前方移动时,当通过碰撞监测开关530、532监测到了碰撞时,就禁止搬运车2的行驶。手动模式下,在搬运车2向前方移动时,即便通过碰撞监测开关530、532监测到了碰撞,也允许搬运车2的行驶。
313.根据上述的构成,手动模式下,在搬运车2向前方移动时,即便监测到了来自搬运车2后方的碰撞的情况下,也允许搬运车2的行驶,而在自动模式下,在搬运车2向前方移动时,监测到了来自搬运车2后方的碰撞的情况下,就禁止搬运车2的行驶,因此,能够更加提高搬运车2以自动模式进行动作之时的安全性。
314.在1个或其以上的实施方式中,搬运车2在自动模式下,能够执行:跟踪用户所携带的信标器而进行移动的追踪运转、以及根据来自用户所操作的遥控器的指示而进行移动的遥控运转。
315.根据上述的构成,能够更加提高搬运车2在自动模式下执行的追踪运转、以及遥控运转之时的安全性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。