1.本技术涉及建筑物墙面绿化的技术领域,尤其是涉及一种建筑物垂直绿化系统。
背景技术:
2.目前,高层住宅是一种常见的建筑物,高层住宅用于供人进行居住。
3.相关技术中的建筑物包括墙体,墙体采用钢筋混凝土堆砌而成。从外部观察建筑时,看到的除了墙面就是窗户。
4.在实现本技术过程中,发明人发现该技术中至少存在如下问题:现有的建筑物上绿化区域少,使人住在建筑物内的生活质量差。
技术实现要素:
5.为了改善建筑物绿化,本技术提供一种建筑物垂直绿化系统。
6.本技术提供的一种建筑物垂直绿化系统,采用如下的技术方案:
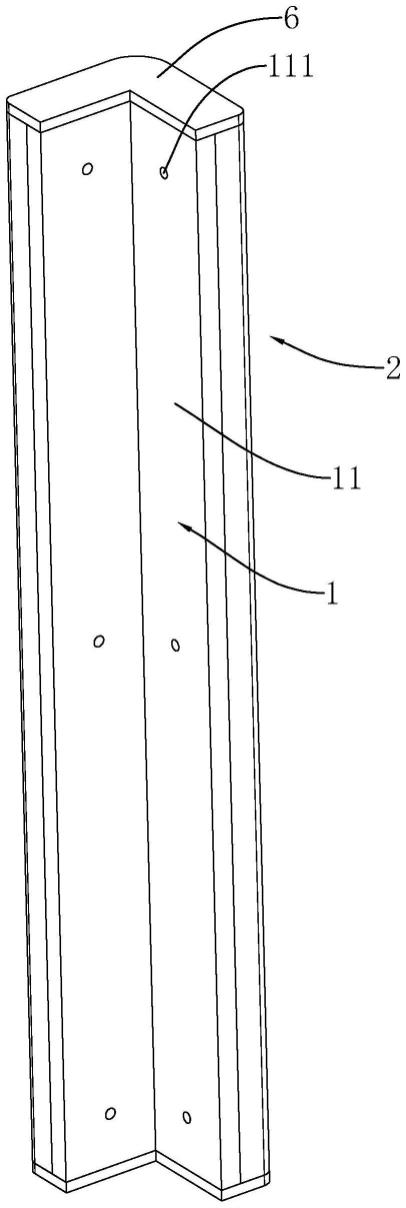
7.一种建筑物垂直绿化系统,包括建筑物本体,所述建筑物本体的侧面设置有窗户以及位于窗户下方的绿化模块,所述绿化模块包括设置于建筑物本体上的支撑板,所述支撑板滑动设置有种植盒,所述种植盒用于种植植物;所述支撑板上设有用于驱动种植盒水平移动的操作结构。
8.通过采用上述技术方案,设置种植盒,可以用于种植绿植,提高建筑物的使用率,达到绿化的效果;通过操作结构可以驱动种植盒移动到窗户下方,便于人种植绿植或对绿植养护。
9.可选的,所述操作结构包括设置于支撑板上的固定架,所述固定架位于种植盒与建筑物本体之间,所述固定架上转动连接有操作杆,所述操作杆外套接有齿轮,所述固定架上滑动设置有用于与齿轮啮合的齿条,所述齿条与种植盒可拆卸连接。
10.通过采用上述技术方案,驱动操作杆转动,操作杆带动齿轮转动,由于齿轮与齿条啮合,齿轮带动齿条水平移动,齿条带动种植盒水平移动,使种植盒一端到窗户处,便于人种植绿植或对绿植养护。
11.可选的,所述种植盒朝向齿条的端面设置有燕尾块,所述齿条上开设有供燕尾块嵌入的燕尾槽。
12.通过采用上述技术方案,燕尾块嵌入到燕尾槽内,使种植盒与齿条沿水平方向不易分离,便于齿条带动种植盒移动。
13.可选的,所述操作杆的上端面设置有操作盘。
14.通过采用上述技术方案,设置操作盘,增大与人手的接触面积,更好的驱动操作杆进行转动。
15.可选的,所述操作盘上设置有限制操作盘转动的锁定件,所述操作杆上开设有插孔,所述锁定件包括穿设于内的插杆,所述固定架的上端面上开设有与插杆螺纹连接的螺纹孔。
16.通过采用上述技术方案,转动插杆,当插杆与螺纹孔螺纹连接时,对操作盘锁定,即对插杆、齿轮锁定,使齿条不易移动,即时绿植盒不易移动;反之,驱动插杆方向转动,使插杆脱离插槽,再转动操作盘可以驱动绿植盒移动。
17.可选的,所述种植盒底部设置有滚轮。
18.通过采用上述技术方案,设置滚轮,采用滚动方式将种植盒移动,相比于原先的滑动设置,减小种植盒移动时需要克服的摩擦力,可以减小种植盒的磨损,便于对种植盒进行移动。
19.可选的,所述支撑板的上端面开设有供滚轮嵌入的滑道。
20.通过采用上述技术方案,设置滑道,具有导向的效果,使种植盒不易朝其他方向移动。
21.可选的,所述种植盒沿齿条长度方向的两侧均设置有把手。
22.通过采用上述技术方案,通过把手,工作人员可以便于将种植盒抬起,将种植盒搬入到室内或者将种植盒放置到支撑板上。
23.可选的,所述种植盒设置有若干个,若干个所述种植盒沿齿条的长度方向阵列分布。
24.通过采用上述技术方案,设置多个种植盒,一方面,可供工作人员种植不同的绿植,另一方面,提高绿化面积。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.设置种植盒,可以用于种植绿植,提高建筑物的使用率,达到绿化的效果;通过操作结构可以驱动种植盒移动到窗户下方,便于人种植绿植或对绿植养护;
27.2.设置锁定件,对操作盘限位,使齿轮不易转动,使齿条与种植盒不易移动。
附图说明
28.图1是本技术实施例的结构示意图;
29.图2是凸显绿化模块与窗户关系的局部结构示意图;
30.图3是凸显操作结构的结构示意图;
31.图4是凸显绿化模块的结构示意图。
32.附图标记:1、建筑物本体;2、窗户;3、绿化模块;31、支撑板;311、滑道;32、种植盒;321、滚轮;322、容置槽;323、排水孔;324、把手;325、燕尾块;33、操作结构;331、固定架;3311、滑槽;3312、螺纹孔;332、操作杆;333、齿轮;334、齿条;3341、燕尾槽;335、滑块;336、操作盘;3361、插孔;4、锁定件;41、插杆。
具体实施方式
33.以下结合附图1-4对本技术作进一步详细说明。
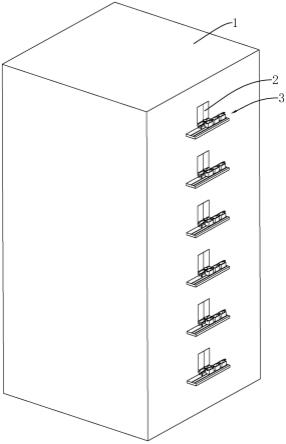
34.本实施例公开了一种建筑物垂直绿化系统。参照图1,一种建筑物垂直绿化系统,包括建筑物本体1、窗户2、绿化模块3。窗户2设置有若干个,且沿建筑物本体1的高度方向阵列分布。
35.参照图1,绿化模块3设置有若干个,绿化模块3的数量与窗户2的数量相同,绿化模块3沿建筑物本体1的高度方向阵列分布。若干个绿化模块3与若干个窗户2相互交错设置。
绿化模块3位于窗户2的正下方。
36.参照图2,绿化模块3包括支撑板31、种植盒32和操作结构33。支撑板31与建筑物本体1固定连接,且位于窗户2的正下方,支撑板31所在的建筑物本体1墙面与支撑板31的长度方向平行。
37.参照图3,种植盒32设置有若干个,若干个种植盒32沿支撑板31的长度方向阵列分布。种植盒32滑动设置于支撑板31上,种植盒32的滑动方向与支撑板31的长度方向一致。种植盒32朝向支撑板31的端面固定连接有滚轮321,支撑板31上开设有滑道311,滑道311沿支撑板31的长度方向延伸。
38.参照图2和图4,种植盒32的上端面开设有容置槽322,容置槽322内用于种植绿植。种植盒32远离建筑物本体1的下端面开设有排水孔323。种植盒32沿支撑板31长度方向两端均固定连接有把手324。
39.参照图2和图3,操作结构33位于窗户2的正下方。操作结构33包括固定架331、操作杆332、齿轮333、齿条334。固定架331固定连接在支撑板31上,且位于种植盒32与建筑物本体1之间。
40.参照图3,固定架331上开设有操作孔,操作杆332转动连接于操作孔内。齿轮333套接在操作杆332外,齿轮333位于固定架331的上方。齿条334滑动设置于固定架331上,齿条334的长度方向与支撑板31的长度方向一致。齿条334朝向固定架331的端面固定连接有滑块335,滑块335的截面呈倒“t”型。固定架331的上端面开设有滑槽3311,滑道311延伸方向与齿条334的长度相同,滑槽3311截面呈倒“t”型。滑块335滑动设置于滑槽3311内。
41.参照图4,齿条334朝向种植盒32的端面开设有燕尾槽3341。种植盒32朝向齿条334的端面固定连接有燕尾块325,燕尾块325可嵌入到燕尾槽3341内。
42.参照图3,操作杆332远离支撑板31的端面固定连接有操作盘336。操作盘336上设置有限制操作盘336转动的锁定件4。操作盘336的上端面开设有若干个插孔3361,若干个插孔3361沿操作盘336的轴线圆周阵列分布。插孔3361偏心设置。
43.参照图3,锁定件4包括插杆41,插杆41穿设于插孔3361内,固定架331上开设有螺纹孔3312,插杆41可与螺纹孔3312螺纹连接。
44.本技术实施例一种建筑物垂直绿化系统的实施原理为:驱动操作杆332转动,使操作杆332脱离插槽,再转动操作盘336,操作杆332带动齿轮333转动,齿轮333带动齿条334移动,齿条334拉动种植盒32移动,当种植盒32移动到窗户2处时,可以进行绿植养护。
45.以上所述仅为本技术的较佳实施例,并不用于限制本技术,凡在本技术的设计构思之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。