1.本实用新型涉及宠物用品领域,更具体地说,它涉及一种智能猫砂盆的多重感应保护系统。
背景技术:
2.随着城市化的加速和生活水平的提高,对于家庭宠物喂养的环境要求越来越高。猫作为世界范围内一种大众化的家庭宠物,其性格具有自身的独特性。猫是一种喜欢清洁和警惕性很高的动物,其排便后均会掩埋自己的排泄物。现如今家庭养猫都会先准备一个猫砂盆,然后训练猫在里面排泄,排泄后人工铲去猫便,清理排泄物。
3.清理猫砂盆中的排泄物是一件费时费力的事情,如果不定期清理猫便则会产生刺鼻的气味,特别是在家庭室内,影响室内空气和环境,所以市面出了多款智能猫砂盆,随着智能猫砂盆的普及,智能猫砂盆安全问题也逐渐重视起来,如果当猫还处于猫砂盆内时如果猫砂盆进行转动铲屎操作,不仅会猫屎重新打乱至猫身上造成卫生问题,还会对猫的安全造成影响。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的在于提供一种智能猫砂盆的多重感应保护系统,该多重感应保护系统能够加强设备安全系数,避免意外发生。
5.为实现上述目的,本实用新型提供了如下技术方案:一种智能猫砂盆的多重感应保护系统,包括有:驱动总成、内桶总成、底座总成以及控制器,所述内桶总成或底座总成上设置有重量感应器;
6.所述内桶总成或驱动总成上设置有热释电感应器;
7.所述热释电感应器和重量感应器分别与控制器电连接设置,所述控制器与驱动总成电连接设置。
8.综上所述,本实用新型具有以下有益效果:首先通过热释电感应器检测猫砂盆附近的生物情况,当生物接近猫砂盆时,热释电感应器发送电信号至控制器,如若此时驱动总成处于工作状态,内桶总成处于转动状态时,控制器控制驱动电机停止,利用热释电材料的自发极化强度随着外界温度的变化而产生电荷移动的特性,以非接触方式检测出人体辐射的红外能量的变化,将其转化成电信号,以电压或电流形式输出,并通过功率放大器将信号放大,达到控制电路的目的。
9.当猫咪进入至猫砂盆内后,通过重量感应器监测猫砂盆整体重量变化,通过重量变化阈值判断猫是否进入至猫砂盆内,如此,从宠物靠近、进入和离开猫砂盆,在不同的阶段利用不同的检测模块提供检测,为宠物提供了更加全面的安全守护。
附图说明
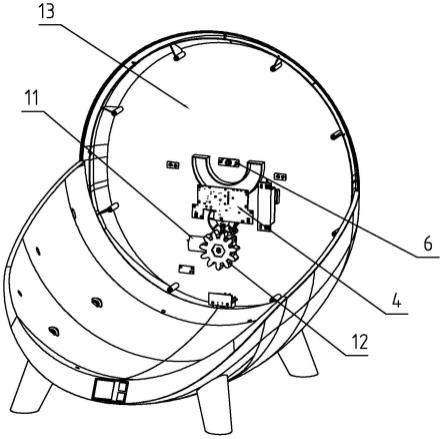
10.图1为智能猫砂盆的立体结构示意图;
11.图2为驱动总成内部的结构示意图;
12.图3为内桶总成的立体结构示意图;
13.图4为脚组件内部的结构示意图。
14.附图标记:1、驱动总成;11、驱动电机;12、驱动齿轮;13、驱动座;2、内桶总成;21、转动齿轮;3、底座总成;31、承接台;32、脚组件;4、控制器;5、重量感应器;6、热释电感应器。
具体实施方式
15.下面结合附图和实施例,对本实用新型进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
16.参照图1至图4所示,为实现上述目的,本实用新型提供了如下技术方案:一种智能猫砂盆的多重感应保护系统,包括有:驱动总成1、内桶总成2、底座总成3以及控制器4,内桶总成2或底座总成3上设置有重量感应器5;
17.内桶总成2或驱动总成1上设置有热释电感应器6;
18.热释电感应器6和重量感应器5分别与控制器4电连接设置,控制器4与驱动总成1电连接设置。
19.本实用新型的设计,首先通过热释电感应器6检测猫砂盆附近的生物情况,当生物接近猫砂盆时,热释电感应器6发送电信号至控制器4,如若此时驱动总成1处于工作状态,内桶总成2处于转动状态时,控制器4控制驱动电机11停止,利用热释电材料的自发极化强度随着外界温度的变化而产生电荷移动的特性,以非接触方式检测出人体辐射的红外能量的变化,将其转化成电信号,以电压或电流形式输出,并通过功率放大器将信号放大,达到控制电路的目的。
20.当猫咪进入至猫砂盆内后,通过重量感应器5监测猫砂盆整体重量变化,通过重量变化阈值判断猫是否进入至猫砂盆内,如此,从宠物靠近、进入和离开猫砂盆,在不同的阶段利用不同的检测模块提供检测,为宠物提供了更加全面的安全守护。
21.该热释电感应器6不仅可以设置于内桶总成2入口出用于感应入口处状态;
22.也可以设置于驱动总成1上,用于感应范围区域内的生物状况,并且相对于内桶总成2而言,热释电感应器6不会随着内桶总成2的转动而发生位置变化,从而使得感应更加稳定精准。
23.该重力感应器不仅可以设置于内桶总成2上,用于感应内桶重力变化;
24.也可以设置于底座总成3上,用于感应底座总成3与地面形成的压力变化。
25.底座总成3包括有承接台31和若干个脚组件32,并且若干个脚组件32上均设置有重量感应器5。
26.脚组件32均包括有支座盖板、脚支座以及脚本体,脚本体均连接于承接台31上,支座盖板连接于脚本体,并且与脚本体合围形成压力腔;
27.重量感应器5连接于脚支座上,脚支座连接于脚本体的下端。
28.每一脚组件32内均设置有重量感应器5,能够使得本猫砂盆不管是出于平面还是微斜的斜面,通过四处的脚组件32依旧能够稳定监测猫砂盆的重量变化。
29.通过该脚组件32的设计,能够对位于脚组件32内部的重量感应器5起到保护作用,并且当上方内桶总成2重量增大时通过承接台31依旧脚支座传递作用至重量感应器5上,从而形成电信号。
30.内桶总成2包括有前板组件,前板组件上设置有红外感应器,红外感应器与控制器4电连接设置。该前板组件设置于内桶总成2进入位置。
31.该红外感应器包括有红外发射窗、红外发射板、红外接收窗、红外接收板,通过红外感应技术检测入口位置处的宠物状况。
32.内桶总成2包括有转动齿轮21;
33.驱动总成1包括有驱动电机11和驱动齿轮12以及驱动座13。
34.转动齿轮21上设置有霍尔磁铁;
35.驱动座13上设置有霍尔板,霍尔板与控制器4电连接。
36.该霍尔磁铁和霍尔板的设计,用于检测内桶总成2转动的工作状态,当转动齿轮21转动时,霍尔磁铁不断触发霍尔板,从而生成电信号,并且将该电信号反馈至控制器4,控制器4根据该电信号判断猫砂盆是否处于工作状态。
37.控制器4通过螺丝紧固于驱动座13上。
38.热释电感应器6通过螺丝紧固于驱动座13上。
39.进一步的设计,还包括有防护上壳,该防护上壳与底座总成3可拆卸连接设置,当防护上壳安装至底座总成3时能够对内桶总成2形成限位作用,防止转动异常导致内桶飞出等情况发生。
40.该防护上壳与底座总成3之间通过固定结构连接,该固定结构具有多种形式,以活扣与卡槽为例,活扣铰接于防护上壳上,卡槽开设于底座总成3上,并且在防护上壳上设置有霍尔感应器与上述霍尔磁铁相同,底座总成3上设置有霍尔触发器与上述霍尔板相同,该霍尔触发器与控制器4电连接,当操作人员需要打开防护上壳时,霍尔触发器发送电信号至控制器4,如果内桶总成2处于转动工作状态时,控制器4根据该电信号,对驱动电机11进行止停操作,本设备不仅对猫咪进行有效防护,而且对操作人员的安全问题提供有效保障。
41.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
