1.本实用新型涉及摄像头技术领域,尤其涉及一种工业机器人用摄像头模组。
背景技术:
2.随着科技的发展,机器人被越来越多的用在了生活以及工业生产的各个方面,其中机器人的视觉系统是机器人获得外部图像信息的最重要部分,而摄像头模组又是机器人视觉系统最主要部分。
3.现有技术中的工业机器人的视觉系统的摄像头为单个,也存在如专利cn109213137a中公开的使用两个并排设置的摄像头,但是上述设计的摄像头都是固定的,无法模拟动物的双眼建立周边环境的准确数据,导致摄像头视野受限,进而环境数据受限或不完整。
4.因此,有必要对现有技术中的摄像头模组进行改进,以解决上述问题。
技术实现要素:
5.本实用新型克服了现有技术的不足,提供一种工业机器人用摄像头模组。为达到上述目的,本实用新型采用的技术方案为:一种工业机器人用摄像头模组,包括:壳体,设置在所述壳体内部的若干转动组件,以及与每个所述转动组件连接的摄像头本体;
6.若干所述转动组件在所述壳体内部对称设置,每个所述转动组件包括:若干齿条座,设置在所述壳体上的若干控制块,设置在所述控制块上的旋转辊,与所述旋转辊连接的弧形块,以及设置在所述弧形块上的若干控制齿轮;所述控制块用于控制所述弧形块的转动,每个所述齿条座上均设置有控制齿条,所述控制齿条能够与所述控制齿轮啮合;若干所述控制齿轮相互啮合;所述弧形块的一侧设置有连接杆,所述连接杆的一端固定连接所述摄像头本体;
7.所述壳体的表面设置有对称布置的凹槽,用于安装所述摄像头本体。
8.本实用新型一个较佳实施例中,若干所述控制齿轮包括:第一控制齿轮、第二控制齿轮、第三控制齿轮和第四控制齿轮;所述第一控制齿轮和所述第四控制齿轮在所述弧形块表面对称设置;所述第一控制齿轮、所述第二控制齿轮和所述第四控制齿轮的大小相等。
9.本实用新型一个较佳实施例中,所述第三控制齿轮的直径大于所述第一控制齿轮的直径。
10.本实用新型一个较佳实施例中,每个所述齿条座的底部均设置有驱动单元,所述驱动单元用于控制所述齿条座的水平往复运动。
11.本实用新型一个较佳实施例中,所述驱动单元包括:若干移动滑轨,设置在所述移动滑轨上的滑块,设置在所述移动滑轨之间的螺纹杆,以及与所述螺纹杆连接的驱动电机;所述齿条座的底部与所述螺纹杆螺纹连接,且与所述滑块固定连接。
12.本实用新型一个较佳实施例中,所述螺纹杆的两端设置在螺杆座上。
13.本实用新型一个较佳实施例中,所述摄像头本体包括:壳体,设置在所述壳体上的
摄像头主板,以及设置在所述摄像头主板上的摄像头座,以及设置在所述摄像头座上的镜头。
14.本实用新型一个较佳实施例中,所述摄像头主板表面设置有光敏电子、高清白灯和红外灯。
15.本实用新型一个较佳实施例中,所述镜头的内部设置有滤光片,所述滤光片由高清红外透光材料制成。
16.本实用新型解决了背景技术中存在的缺陷,本实用新型具备以下有益效果:
17.(1)本实用新型提供了一种工业机器人用摄像头模组,该摄像头模组为双目结构,通过转动组件使得双目摄像头都能够转动,扩大了视野范围,实现仿照动物的双眼立体建立移动机器人周边环境的准确数据,保证了工业机器人摄像的准确性。
18.(2)本实用新型在弧形块上设置若干相互啮合的控制齿轮,且弧形块两端的控制齿轮对称设置,通过转动弧形块,使得第一控制齿轮或第四控制齿轮与控制齿条的配合运动,扩大了视野范围,使得每个镜头模组在转动范围的极限两侧具有较高的稳定性。
19.(3)本实用新型中摄像头本体在对图像采集中通过高清白灯和红外灯实现补光,并与滤光片形成配合,实现不同图像视觉,提高了视频图像的质量。
附图说明
20.下面结合附图和实施例对本实用新型进一步说明;
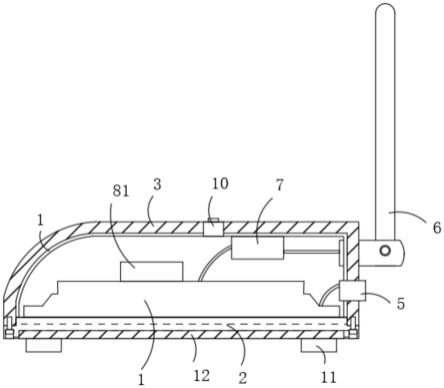
21.图1是本实用新型的优选实施例的一种工业机器人用摄像头模组的结构示意图;
22.图2是本实用新型的优选实施例的转动组件的结构示意图;
23.图3是本实用新型的优选实施例的驱动单元的结构示意图;
24.图中:1、壳体;2、转动组件;21、齿条座;22、控制齿条;23、控制块;24、弧形块;251、第一控制齿轮;252、第二控制齿轮;253、第三控制齿轮;254、第四控制齿轮;3、移动滑轨;4、螺纹杆;5、驱动电机;6、螺杆座;7、摄像头本体。
具体实施方式
25.现在结合附图和实施例对本实用新型作进一步详细的说明,这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
26.如图1所示,示出了本实用新型中一种工业机器人用摄像头模组的结构示意图。该摄像头模组为双目结构,通过转动组件2使得双目摄像头都能够转动,扩大了视野范围,实现仿照动物的双眼立体建立移动机器人周边环境的准确数据,保证了工业机器人摄像的准确性。该摄像头模组包括:壳体1,设置在壳体1内部的若干转动组件2,以及与每个转动组件2连接的摄像头本体7。若干转动组件2在壳体1内部对称设置。壳体1的表面设置有对称布置的凹槽,用于安装摄像头本体7。
27.如图2所示,示出了本实用新型中转动组件2的结构示意图。每个转动组件2包括:若干齿条座21,设置在壳体1上的若干控制块23,设置在控制块23上的旋转辊,与旋转辊连接的弧形块24,以及设置在弧形块24上的若干控制齿轮。每个齿条座21上均设置有控制齿条22,控制齿条22能够与控制齿轮啮合。
28.若干控制齿轮包括:第一控制齿轮251、第二控制齿轮252、第三控制齿轮253和第四控制齿轮254;第一控制齿轮251和第四控制齿轮254在弧形块24表面对称设置;第一控制齿轮251、第二控制齿轮252和第四控制齿轮254的大小相等。第三控制齿轮253的直径大于第一控制齿轮251的直径。在控制块23驱动弧形块24转动的过程中,弧形块24带动上述第一控制齿轮251、第二控制齿轮252、第三控制齿轮253和第四控制齿轮254的转动,使得第一控制齿轮251或第四控制齿轮254切换与控制齿条22的啮合,使得每个镜头模组在转动范围的极限两侧具有较高的稳定性。
29.控制块23的一端与壳体1固定连接,控制块23的内部设置有电机,用于控制弧形块24的转动。若干控制齿轮相互啮合;弧形块24的一侧设置有连接杆,连接杆的一端固定连接摄像头本体7。
30.如图2所示,示出了本实用新型中驱动单元的结构示意图。本实用新型中每个齿条座21的底部均设置有驱动单元,驱动单元用于控制齿条22座21的水平往复运动。驱动单元包括:若干移动滑轨3,设置在移动滑轨3上的滑块,设置在移动滑轨3之间的螺纹杆4,以及与螺纹杆4连接的驱动电机5;齿条座21的底部与螺纹杆4螺纹连接,且与滑块固定连接。螺纹杆4的两端设置在螺杆座6上。
31.摄像头本体7包括:壳体1,设置在壳体1上的摄像头主板,以及设置在摄像头主板上的摄像头座,以及设置在摄像头座上的镜头。摄像头主板表面设置有光敏电子、高清白灯和红外灯。镜头的内部设置有滤光片,滤光片由高清红外透光材料制成。其中,红外灯的波段为500-1500um。本实用新型中的摄像头本体7在对图像采集中通过高清白灯和红外灯实现补光,并与滤光片形成配合,实现不同图像视觉,提高了视频图像的质量。
32.本实用新型使用时,通过驱动电机5驱动相应的螺纹杆4在螺纹座上原位转动,驱动齿条座21上的控制齿条22水平运动;同时,控制块23控制弧形块24的转动,使得第一控制齿轮251或第四控制齿轮254切换与控制齿条22的啮合,使得每个镜头模组在转动范围的极限两侧具有较高的稳定性,进而扩大了视野范围。摄像头本体7在对图像采集中通过高清白灯和红外灯实现补光,并与滤光片形成配合,实现不同图像视觉,提高了视频图像的质量。
33.以上依据本实用新型的理想实施例为启示,通过上述的说明内容,相关人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定技术性范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。