1.本公开涉及超声波技术,更具体地说,涉及用于提供粘弹性介质的图像数据的方法和系统。具体地说,所述方法用于估计介质的非线性剪切波弹性(nl-swe),更特别地,用于检测介质中的软癌性区域(例如乳房或肝脏中)(即,与非癌性介质相比的癌性)。
背景技术:
2.可通过不同方法获得用于成像的超声数据。例如,所获得的图像可以是通过观察组织的变形获得的静态变形(即应变)图像,或剪切波弹性成像(swe)图像。
3.已知通过剪切波弹性成像(swe)的超声成像,检测硬癌。然而,该技术可能不太适于检测软癌,这主要是因为软癌可能会具有与常规弹性成像图像中的非癌性介质相似的弹性特征。
4.还已知估计介质的非线性特征,例如由h.latorre-ossa et.al:quantitative imaging of nonlinear shear modulus by combining static elastography and shear wave elastography,ieee transactions on ultrasonic ferroelectronics and frequency control.2012年4月;59(4):833-9。该文献提出一种组合静态弹性成像和剪切波弹性成像的方法,通过将声弹性理论应用于准不可压缩软固体中来推导出非线性剪切模量。使用机械致动器来使得探头和附接到探头的压板轴向移动。由此通过使得探头和压板以0.1mm的步长轴向移动(每步持续时间少于30s,~33%),在体模的顶部施加准静态应力。在每个压缩步骤中,获取完整的剪切速度图和因此的介质的二维剪切模量图。
5.还已知另一文献:m.bernal et.al.:in vivo quantification of the nonlinear shear modulus in breast lesions:feasibility study.ieee trans ultrasonic ferroelectric frequency control.2016年1月;63(1):101-9.doi:10.1109/tuffc.2015.2503601.epub 2015年11月24日。在该文献中,使用线性电机,单向压缩体模。电机具有编程步骤,因此提供对体模的受控单向应力。在给定步骤压缩之后,立即获得剪切波速度图。由这些数据,还获取剪切模量图或杨氏模量图。
6.然而,采用机械控制的变形设备的理念不适于医学检查领域的实践应用。在该实践中,使用者(例如医生、技术员、超声医师)需要手动控制手持式超声探头,才能针对性地考虑到病人的个体情况和身体状况(例如,检查对于病人是否是痛苦的或至少不舒服的)。由此,使用者实现规则化姿势,例如规则化步进变形,将是不可能的,或至少是非常困难的。相反,手动压缩导致多个不准确度,例如关于介质所需的变形,或压缩步骤中任何潜在的变形变化。这样的不准确度可能会导致噪声数据,因此导致对一个或多个非线性剪切波弹性(nl-swe)数值的不准确估计。例如,不同从业者施加应力的方式可能会不同。这种对使用者的依赖性使得需要提供一种与上述不同的方法,以改善(数据)采集的可重复性。
7.作为可行的对策,可限制压缩步骤的数量。然而,在该情况下,还减小在所有步骤中分别收集的数据的总量。因此,即使使用者可能会更准确地施加更少的压缩步骤,但是数据中任何剩余的噪声仍会对最终结果产生更大的影响。
8.由wo2021116326a2已知另一使用剪切波,量化介质的非线性弹性的超声波方法。该方法包括以下步骤:a1.-使用剪切波,收集关于介质弹性的时间序列数据,a2.-在收集剪切波的过程中,根据预定的变形序列(顺序),对介质施加连续变化的变形,a3.-观察实际的变形变化,和b.-根据时间序列数据和变形变化,来量化介质的非线性弹性。该方法能够对介质连续并逐渐地施加变形。
9.然而,由于温度和时长限制,通过该方法收集的数据的量会仍是有限的。换句话说,用于收集数据和应用变形的超声波探头可能会加热(人类组织)介质。而且,被检查的人必须在给定的、可能不自然的位置上保持不动。出于这些原因,应尽可能缩短数据收集的时间。而且,数据质量可能会受到限制,例如由于使用者波动和噪声测量。
10.总之,已知方法对小数据和高噪声表现出有限的鲁棒性,以及在实际应用中有限的可再现性,尤其是导致分析结果的复杂性增加。由此,分析可能会要求更长时间和更多工作,并可能会潜在地要求多次检查病人,以收集足够的有意义的信息。
技术实现要素:
11.目前,仍期望克服上述问题,尤其是提供一种用于准确地估计介质的非线性剪切波弹性的超声方法和系统,特别是在仅有有限量的采集数据的情况下。换句话说,期望的方法应对小数据和高噪声更具有鲁棒性,由此具有更好的可再现性。
12.相应地,本公开的目的因此在于获得介质中的所关注的区域的补充性且更有意义的信息,这些信息利于在实践应用中分析介质。由此,期望的是尽可能地缩短用于分析所获取(采集)的检查信息的时间和缩短检查病人的时间。医学应用的非限制性示例包括探测非硬性癌,尤其是以非侵入性的方式(避免任何干预,例如活检以获取关于所关注的区域的信息)。
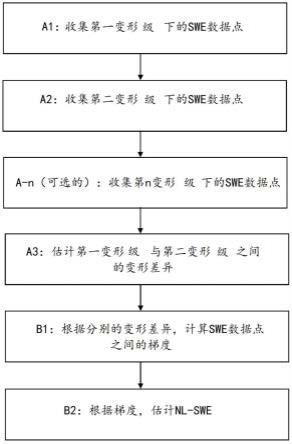
13.因此,根据本公开的实施例,一种用于估计介质的非线性剪切波弹性的方法。所述方法包括以下步骤:
14.·
a1.第一采集步骤,在该步骤中,在施加到介质的第一变形级下,采集包括介质的剪切波弹性数据点的第一集合,
15.·
a2.第二采集步骤,在该步骤中,在施加到介质的不同于第一级的第二变形级下,采集包括介质的剪切波弹性数据点的第二集合,
16.·
a3.变形估计步骤,在该步骤中,估计第一变形级与第二变形级之间的变形差异,
17.·
b1.计算步骤,在该步骤中,根据第一变形级与第二变形级之间的变形差异,计算分别属于第一集合和第二集合的至少两个数据点中的数据点之间的梯度,
18.·
b2.弹性估计步骤,在该步骤中,根据梯度,估计介质的非线性剪切波弹性。
19.通过提供这样的方法,使得能够获得一种针对少量采集数据和数据中的高噪声更具有鲁棒性的用于估计非线性剪切波弹性的方法。该方法由此使得即使手动地实施变形级的改变(变化),也能够实现更加可靠的估计和更好的可再现性。
20.相应地,所提出的方法是独立于使用者地可预测的,无需详细训练,从而提高了采集(获取)的可重复性。换句话说,不同从业者施加应力(即介质的变形)的方式不同的情况不影响或至少更小地影响所采集的检查信息的质量。
21.作为另一优点,可减小检查病人所需的时间和相关联的成本。这尤其是有利的,因为这避免探头由于超声波而变热,并且还因为由于检查期间的不舒服的位置,超声波检查对于病人可能会是令人疲劳或者不舒服的。而且,由于其增加的意义(信息),还减小分析所采集的信息的所需时间、成本和复杂性。
22.有利地,本公开的方法可用设置为swe成像的常规超声系统执行。换句话说,无需硬件改动。
23.可通过数据点之间的剪切波弹性的变化,根据第一变形级与至少一个第二变形级之间的变形差异,确定梯度。
24.在一个示例中,可通过以下确定梯度r
ij
:
[0025][0026]
其中,e是介质的根据波弹性数据点确定的杨氏模量系数,并且∈是表示变形级的应变系数,其中,指数i和j表示两个不同变形级。
[0027]
在另一示例中,可通过以下确定(即推广到)梯度
[0028][0029]
其中,i1,i2,
…
,ik是表示k(k≥2)个不同变形级的指数。相应地,在成对的点上定义的斜率(slope)(参见例如上文的公式(2))可由此推广到在数量为k(其中k》2)的点的子集上定义的斜率。
[0030]
变形估计步骤可包括以下的子步骤:
[0031]
·
采集介质在不同变形级下的应变数据(或应变数据点)序列,
[0032]
·
根据应变数据,确定第一变形级与第二变形级之间的变形差异。
[0033]
采集应变数据序列的子步骤可包括:
[0034]
·
生成介质的超声波数据序列(一系列超声波数据),和
[0035]
·
使用预定的变形估计算法比较超声波数据。
[0036]
所述超声波数据序列可包括例如b型超声波数据。序列可以是时间序列,例如包括多个相继图像帧的数据。
[0037]
在一个示例中,可以大致同时地采集应变数据点和swe数据点。然而,也可交替地采集数据点,例如使用单个超声波换能器或换能器网络。
[0038]
所述算法可例如是基于ai(人工智能)的算法。算法可例如包括计算机实施的机器学习(machine learning)模型,例如人工神经网络。示例包括卷积神经网络。可以通过监督的训练方法,使用例如带注释的图像作为训练数据,或通过无监督的训练方法,训练模型。
[0039]
所述算法可以基于以下中的至少一项的确定:
[0040]
·
相继帧之间的像素相关性,
[0041]
·
相继帧之间的自相关阶段(相位),
[0042]
·
相继帧之间的多普勒信号,
[0043]
·
相继帧之间的斑点跟踪,和
[0044]
·
相继帧之间的光通量,
[0045]
·
或任何其它数据比较技术。
[0046]
在一个示例中,可使用二维探头(即设置为获取二维图像数据的探头),采集应变数据。在另一示例中,可使用三维探头(即设置为获取三维图像数据的探头),采集应变数据。在该情况中,可获得三维应变数据,这可获得更精确的变形估计。此外,之后可基于应变数据确定探头是沿着轴线横向地移动,还是沿不期望的旋转方向移动。
[0047]
剪切波弹性数据点可包括对于介质的roi(所关注区域)的不同区域(或区)的分别的多个剪切波数值。对于每个区域(区),估计非线性剪切波弹性参数,以构建所关注区域的非线性剪切波弹性图。
[0048]
而且,相应地,可行的是应变数据(或应变数据点)的序列可包括对于介质的roi(所关注区域)的不同区域(或区)的分别的多个应变数值。然而,还可行的是,应变数据(或应变数据点)的序列可仅包括表示介质的roi(所关注区域)的一个应变数值(即在时间序列中)。
[0049]
例如,剪切波弹性数据点可包括具有多个像素的剪切波弹性图像数据。例如,swe数据点可构成一系列(序列)相应的帧中的一个swe图像帧。
[0050]
对于每个像素,可估计非线性swe参数,以构建非线性剪切波弹性图。相应地,所述nl-swe图可具有与swe图像数据相同的像素分辨率。然而,还可行的是,nl-swe图具有减小的分辨率,例如通过估计对于像素簇的单个nl-swe参数。
[0051]
第一集合和第二集合中至少一个可包括多个剪切波弹性数据点。例如,每个集合包括多个swe数据点。
[0052]
在计算步骤中,可根据第一变形级与第二变形级之间的变形差异,计算分别属于第一集合和第二集合的至少两个数据点之间的多个梯度。
[0053]
在弹性估计步骤中,可根据该多个梯度,估计介质的非线性剪切波弹性。
[0054]
相应地,给定n个swe数据点,当涉及任意两个不同级时,计算的梯度的数据量可以直至(n-1)n/2(参见公式(2)))。由此,在公式(2)的示例中,要处理的数据量可从n增大到(n-1)n/2,而不延长数据采集时长。而且,当涉及n个点中的k(k≥2)个点的子集时,所计算的梯度的量增大到(2
n-n-1)(参见公式(4))。由此,在公式(4)的示例中,要处理的数据量可甚至从n增大到(2
n-n-1),而不延长数据采集时长。
[0055]
期望的是,所采集的swe数据点大致均匀地分布在这些变形级上。换句话说,每个变形级可包括大致相同数量的所采集的swe数据点。在用预定采样率采集swe数据点的情况下,可例如通过引导使用者(例如使用用户界面)在大致相同的时间内保持在每个变形级中,以获得均匀分布。这样的均匀分布的优点在于,可增大不同变形级的数据点的可行组合的数量。相应地,可增大nl-swe估计中要处理的总数据量(即梯度数)。
[0056]
弹性估计步骤可以还包括以下的子步骤:
[0057]
·
基于所估计的梯度(r
ij
和/或)和它们的统计方差,创建线性最小方差估计器,以估计对于每个梯度的分数(w
ij
和/或),该分数与其方差成反比例,统计方差可以例如是空间和/或时间统计方差,
[0058]
·
用各自的分数,对每个梯度加权,
[0059]
·
根据加权的梯度和/或梯度的加权平均值,估计最终nl-swe参数。
[0060]
相应地,可使用在所有线性估计器中具有最小方差的估计nl-swe参数的估计器。
由此,所述nl-swe估计器具有比普通最小二乘线性拟合更高的鲁棒性。
[0061]
例如,可通过确定nl-swe的线性最小方差估计优化加权分数由以下优化得出:
[0062][0063]
其中:
[0064]
var指代方差,
[0065]wij
是要得出的加权分数,
[0066]aij
是从梯度rij得出的非线性剪切波弹性参数,并且
[0067]
指数i和j表示两个不同变形级。
[0068]
而且,可使用geary-hinkley变换来改善最小方差估计器的精确度。
[0069]
优化分数可通过以下来估计:
[0070][0071]
其中:
[0072]
是由每个非线性剪切波弹性参数a
ij
推导出的分数,
[0073]
是非线性剪切波弹性参数a
ij
的逆方差估计,和
[0074]
是非线性剪切波弹性参数a
mn
的逆方差估计,其中,指数m和n遍历剪切波弹性数据点的至少两个(或直至所有)成对组合:1《=m《=n,m《n《=n,其中,n是在用于估计nl-swe的方法中考虑的数据点的数量。期望的是,n可以至少为2,更期望的是,至少为3。在该情况下,要指出的是,所述方法仅用2个swe数据点来工作。然而,对于等于3或更大的n,在nl-swe估计步骤中要处理的数据大小可从n增大到n(n-1)/2,而不延长采集时长。
[0075]
如上所述,最终nl-swe参数可通过以下来估计:
[0076][0077]
所述方法可以还包括置信度估计步骤,其包括:
[0078]
·
根据该至少一个分数和非线性剪切波弹性参数(a
ij
)的方差估计确定对于最小方差估计器的置信度的统计学模型,
[0079]
·
生成包含非线性剪切波弹性图的区域或像素的置信度信息的置信度图。
[0080]
相应地,所述置信图可指示nl-swe图在哪些区域显得更可靠,和在哪些区域显得更不可靠。
[0081]
所述置信图可具有与nl-swe图相同的像素分辨率。但是,还可行的是,置信图具有减小的分辨率,例如通过对于nl-swe图的像素簇估计的单个置信参数。
[0082]
变形级可由变形范围限定,以使得在计算步骤中,仅收集和/或考虑给定级的范围内的剪切波弹性数据点。
[0083]
期望的是,两个相邻变形级的范围不重叠。相应地,可实现两个变形级之间的足够
的变形改变(差异)。
[0084]
在从一个变形级改变到另一个变形级的期间,仅采集应变数据。换句话说,在该和/或nl-swe估计方法中,在这样的改变期间的swe数据点不被采集或被忽略。
[0085]
相同的超声波探头可用于发射和接收超声波,收集剪切波弹性数据点,和/或采集应变数据,和/或对介质施加变形。相应地,探头的使用者可从介质收集所需数据,并同时使用所述探头,手动地对介质施加变形。
[0086]
所述方法可以还包括引导和/或反馈步骤,在该步骤中,由用户界面引导使用者,以对介质施加变形,和/或从用户界面接收根据所施加的变形的反馈。
[0087]
相应地,使用者可自由地且手动地施加变形,但可由所述方法辅助,例如以便满足每个变形级中的数据采集所需的最短时间和/或两个变形级之间所需的最小变形改变。
[0088]
本公开还涉及一种计算机程序,其包括计算机可读指令,该计算机可读指令当被数据处理系统执行时,使得该数据处理系统执行根据本公开的方法。
[0089]
本公开还涉及一种计算机可读的记录介质,其具有记录在其上的计算机程序,该计算机程序包括用于当所述程序被计算机执行时,执行本公开的方法的步骤的指令。
[0090]
本公开还涉及一种用于估计介质的非线性剪切波弹性的超声系统,该系统设置为:
[0091]
·
在施加到介质的第一变形级下,采集包括介质的剪切波弹性数据点的第一集合,
[0092]
·
在施加到介质的不同于第一级的第二变形级下,采集包括介质的剪切波弹性数据点的第二集合,
[0093]
·
估计第一变形级与第二变形级之间的变形差异,
[0094]
·
根据第一变形级与第二变形级之间的变形差异,计算分别属于第一集合和第二集合的至少两个数据点中的数据点之间的梯度,
[0095]
根据该梯度,估计介质的非线性剪切波弹性。
[0096]
所述系统可还包括另外的功能性特征和/或对应于上述方法步骤进行配置。
[0097]
本公开及其实施例可在专用于人类、植物或动物的医疗系统的背景中使用,但也可以在任何(可能地非生命的)要考虑的软材料的背景中使用。
[0098]
可考虑实施上述要素和本说明书中的其它要素的组合,除非另有矛盾。
[0099]
要理解的是,上文的概括说明和下文的详细说明仅是示例性和解释性的,是为了示意目的提供的,不限制所要求保护的本公开。
[0100]
包括并构成本说明书一部分的附图是为了示意目的提供的,它们示出本公开的实施例,并与本说明一起用于支持和示出本公开的原理。
附图说明
[0101]
图1示出根据本公开的实施例的方法的第一示例性实施例;
[0102]
图2a、2b和2c示意性地示出根据本公开的实施例的介质的步进式变形的一个示例;
[0103]
图3a示意性地示出根据本公开的实施例的作为时间帧的函数的应变的图;
[0104]
图3b示意性地示出了对应于图3a的应变函数的、作为时间帧的函数的弹性e的图;
[0105]
图4更详细地示出根据本公开的实施例的方法的一个示例性流程图;
[0106]
图5示出根据本公开的实施例的超声系统的一个示例性实施例。
具体实施方式
[0107]
现在将详细参考本公开的示例性实施例,本公开的示例在附图中示出。在可能的情况下,将在所有附图中使用相同的附图标记来指代相同或相似的部分。此外,在具体实施例、例如图1的实施例的语境中解释的特征,在适当的时候,也适用于任何其他实施例,除非另有说明。
[0108]
图1示出根据本公开的实施例的方法的第一示例性实施例。该方法可通过超声波系统实施。参照图5说明一个示例。例如,为了开始/启动该方法,可启动用于非线性剪切波弹性(nl-swe)的第一成像模式。该方法包括以下步骤:
[0109]
在步骤a1中,在对介质施加第一级变形时,收集包括介质的至少一个swe(剪切波弹性)数据点的第一集合。在下文中说明收集方法和swe数据点的示例性示例。第一变形级(级)也可被视为参考级(级)。所述第一级也可是没有给所关注的区域施加变形,或几乎不施加变形的级,即例如探头(使用凝胶)没有施加应力地与介质接触。
[0110]
在步骤a2中,在对介质施加第二级变形时,收集包括介质的至少一个剪切波弹性数据点的第二集合。所述第二级不同于第一级,例如比第一级变形更大或变形更小。第二变形级也可被视为第一比较级。在第一级意味着介质变形的情况下,第二级也可是没有给所关注的区域施加变形,或几乎不施加变形的级,即例如探头(使用凝胶)没有施加应力地与介质接触。
[0111]
在可选的步骤a-n中,在对介质施加第n级变形时,收集包括介质的至少一个剪切波弹性数据点的第n集合。也可存在多个第n变形级,例如第三级、第四级等等,以此类推。所述第n级可以不同于第二级和/或第一级。例如,第一、第二和第n级可形成相继变化的变形,例如连续增大或减小的变形。可替代地,它们也可以是交替的变形级。例如,第n变形级可大致对应于第一变形级。
[0112]
在步骤a3中,估计第一变形级与第二变形级之间的变形差异。可选地,还估计第n级与第二级和/或第一级之间的差异。在下文中说明示例性的估计方法。
[0113]
在步骤b1中,确定分别属于第一、第二集合和/或第n集合的至少两个数据点之间的至少一个梯度(即比例或变化),或可选地,确定分别属于第一、第二集合和第n集合的至少三个数据点的至少一个梯度。所述梯度可具体通过数据点之间的剪切波弹性的变化来确定,该变化是相应的第一、第二和可选地第n变形级之间的变形差异的函数。例如,可根据第一和第二集合的两个数据点确定第一梯度,并且可根据第二和第n集合的两个数据点确定可选的第二梯度。进一步的示例性梯度可根据第一和第n集合的两个数据点来确定,尤其是在对应的第一变形级和第n变形级不同的情况下。而且,还可根据多于两个的数据点来确定梯度。
[0114]
在步骤b2中,根据该至少一个梯度,估计介质的nl-swe(非线性剪切波弹性)(例如nl-swe参数)。
[0115]
步骤a1至a-n可以在时间上是相继的。步骤a3可期望与步骤a1、a2、a-n同时进行。有利地,该过程(即相应的swe数据收集或“扫描”)可与超声过程同时组合和/或交错,以实
时或接近实时地估计变形的演变(即步骤a3)。
[0116]
步骤b1可在步骤a3之后实施一次,和/或在步骤a2之后开始,并在每个另外的步骤a-n之后重复,而实施多次。在后者的情况中,可在分别的步骤b1中,确定已经收集的数据点的分别的梯度。步骤b2可在步骤b1之后进行,也可以在分别的各个步骤b1之后进行多次。在后一情况下,可在第一步骤b2中快速获得第一估计,然后可在之后的步骤b2中进一步细化。也可通过从b2回到a1的分别的循环,来重复方法a1至b2。
[0117]
在下文中,也参照图2至5,说明所述方法的可选的实施例和方面。
[0118]
剪切波弹性数据点可包括具有多个像素的剪切波弹性图像,其中,对于每个像素,估计非线性剪切波弹性参数,以构建非线性剪切波弹性图。换句话说,swe数据点可理解为数据收集周期,由该数据收集周期,可得出介质的所关注的区域的swe图像。
[0119]
根据一个方面,可由以下子步骤,生成在步骤(a1)中产生的剪切波弹性数据点:
[0120]
a1.1.激励步骤,在该步骤中,通过发射至少一个聚焦超声波,在介质中生成剪切波,
[0121]
a1.2.观察步骤,在该步骤期间,通过从介质获取超声波数据的时间序列,观察剪切波的传播,
[0122]
a1.3.处理步骤,在该步骤期间,由介质的所述超声波数据并由剪切波传播模型,确定弹性数据点的数据。
[0123]
该过程可使用平面波,但该步骤也可通过使用聚焦波来实施。
[0124]
相应地,nl-swe方法可使用超声波方法来确定介质的剪切波弹性(swe)。
[0125]
对应的子步骤可由步骤a2和a-n构成。
[0126]
变形估计步骤a3可包括收集介质在不同变形级下的物理应变数据的序列,并根据应变数据,确定第一变形级与第二变形级之间的变形差异的步骤。收集物理应变数据的序列的子步骤可尤其包括生成介质的超声波图像帧的序列并使用预定运动估计算法比较超声波图像帧。
[0127]
也可通过对应的子步骤,确定第一与第n和/或第二与第n变形级之间的变形变化(改变)。
[0128]
例如,用于收集剪切波弹性数据点的超声波探头也可用于收集应变数据和/或用于给介质施加变形。
[0129]
剪切波数据收集和变形估计方法可基于平面超声波,而b型方法可基于非平面超声波。作为用于确定表示变形变化的静态弹性(“应变”)的超声波过程的替代方案,或附加地,探头也可配备有允许观察(测量或跟踪)介质的变形演变的压强换能器。
[0130]
图2a、2b和2c示意性地示出根据本公开的实施例的介质的变形的一个示例。具体地说,图2a至2c示意性地示出对介质施加相继改变(即增大)的变形。然而,也可施加减小或交替的变形变化。在图2a至2c的示例中,过程起始于图2a所示的状态,终止于图2c所示的状态。具体地说,图2a至2c示出通过施加例如步进式增大的变形导致的介质的变形演变。
[0131]
图2a至2c中每幅因此可显示一个步骤,即一个变形级。例如,图2a可表示根据本公开的第一变形级,图2b可表示根据本公开的第二变形级,图2c可表示根据本公开的第n变形级。有利地,本公开的方法可允许使用者自由地选择或选取变形级。换句话说,期望的是,不预先设定级。这是可能的,因为该方法有利地收集所有必要的数据以可靠地计算梯度,而与
用户施加的变形的变化无关。
[0132]
例如,使用者可将探头6保持在相对于介质的第一位置,如例如在图2a中所示在大致恒定的位置一定时间(例如从几分之一秒至数秒,或如由用户界面给使用者指示的),然后将位置改变到如例如在图2b中所示的第二变形级,以再次保持恒定一定时间,以此类推。在每个大致恒定的位置上,可收集至少一个swe数据点,并相应地,可实时、伪实时或在后期处理中估计变形级。相应地,在后期处理的后一情况中,还可行的是,在收集了数据(参见方法的步骤a1、a2)之后,并在处理数据以估计nl-swe之前,被检查的人可离开。还可行的是,远程地实施数据处理,例如在发生数据收集的房间或建筑以外的另一房间或建筑中。由此,可通过(预定容差)变形范围,限定变形级,以使得仅给定级别范围内的剪切波弹性数据点能够被收集和/或能够在计算步骤中被考虑。一旦使用者施加超过(容差)范围的变形变化,所述方法能够识别从一个级别到另一个级别的变形变化。期望的是,两个相邻变形级(例如图2a和2b的)的范围选择为使得它们相互不重叠。由此,该方法能够可靠地识别变形是否已经从一个级别改变到另一个级别。在从一个变形级变化到另一个变形级期间,可仅收集/记录/分类应变数据。
[0133]
图2a描绘出超声波系统1在过程的时间t0的操作,探头6在外表面3上施加比在之后的步骤中更小的压强p。外表面3保持大致水平(在x方向上)。介质i0的图像数据包括例如处于相对于外表面3深度z1处的夹杂物2i。同时,用于估计介质的非线性剪切波弹性的超声波过程(如上所述)开始。
[0134]
图2b示出超声波系统1在过程的时间t1的操作,施加大于p的外部压强(或应力),其使得外表面3在z方向上向着介质2的内部变形。由此,介质的变形已经相继地改变(变化)。
[0135]
图2c示出超声波系统1在过程的时间t2的操作,外部压强p”比在t1施加的p’更大。可以以步进式的方式执行如图2a至2c示出的变形的改变。可替代地,可对介质施加相继的解除压缩或交替压缩/解除压缩。
[0136]
全部过程可能需要数秒,例如5至10秒。每个步骤可花例如0.5至5秒。期望的是,所述方法不意味着任何时间上限。然而,由于例如从业者和/或被检查的人的外部时间限制,快速地执行所述方法,尤其是数据收集(方法的步骤a1、b2)。被检查的人可例如需要保持在不舒服或累人的位置,或身体的被检查的部位可能会被超声波加热。使用者可自由地控制每个单一变形级的时间,但可由用户界面引导(如下所述)。该时间对于在介质的变形变化期间收集足够的(即在该变化期间足以量化介质的非线性剪切波弹性的)数据是有用的。
[0137]
换句话说,图2a至2c所示的变形变化可由使用者自由地选择,但也可由预定变形序列或自适应的(即由计算机算法,例如基于ai的算法实时和/或根据具体情况构建的)变形序列引导。例如,该序列可以由包括视觉指示器、声学指示器和触觉指示器中的至少一个的用户界面指示。视觉指示器的示例包括屏幕上或以其它方式显示的箭头或任何其它符号,和例如布置在超声波探头上的led。声学指示器的示例包括语音引导或警报声指示。触觉指示器的示例包括例如集成在超声波探头处的振动单元。这允许使用者遵守单一变形级的合适的定时,以使得在每个变形级下,能够收集足够的数据。例如,用户界面可视觉地和/或声学地和/或触觉地指示何时停止/改变变形和/或是否要施加增大的或减小的变形。此外,可使用反馈功能来给使用者指示是否在单个步骤之间施加足够的变形改变。例如,所述
方法可由系统引导(即辅助使用者),以实现可再现的预定检查。在该情况下,变形步骤可具有由用户界面指示的预定时长,和/或它们的最短时长(其可根据在变形步骤中收集的数据量来确定)。在后一情况下,系统可基于所收集的数据决定(如例如在图4的情况中所述)是否已经收集了足够的有效数据,并可施加变形改变。
[0138]
还可行的是,自动化变形的施加,例如通过使用以自动化的方式,根据预定/自适应的序列,移动探头或另外的压板的机械臂。
[0139]
图3a示意性地示出根据本公开的实施例的,作为时间帧的函数的应变的图,图3b示意性地示出对应于图3a的应变函数的作为时间帧的函数的弹性e的图。换句话说,图3a和3b可以是对应的时间图,其中,图3a示出单位为%的应变,图3b示出弹性e。随着时间推移,两种类型的数据都被收集为各自的数据点(换句话说,作为数据样本)。在本示意性示例中,大致同时地收集应变和弹性的数据点。然而,也可交替地收集数据点,例如使用单个超声波换能器或换能器组。
[0140]
在图3a和3b所示的示例中,变形级(即应变)以步进式的方式,随着时间推移改变(变化)。在每个步骤中,变形级保持大致恒定(参见图3a)。在每个大致恒定的变形级中,收集大致5至8个数据点。然而,也可收集更多或更少的数据点。
[0141]
如图3b进一步所示的,在变形改变期间收集的弹性数据点的噪声是相当大的。由于该原因,期望的是,在收集步骤a1、a2中不收集/选择/分类/使用,和/或在计算步骤b1中不考虑,从一个级别到另一个级别的变形改变期间的任何swe数据点。换句话说,在从一个变形级到另一个变形级的变化期间,可仅收集应变数据,以监控变形变化。
[0142]
图4更详细地示出根据本公开的实施例的方法的一个示例性流程图。如在下文中更详细地解释的,图4的流程图可包括具有多个不同变形(即压缩和/或解除压缩)级的获取(采集)序列,该多个变形级由流程图中的循环指示。
[0143]
在步骤s1中,收集swe和应变(即变形)数据点。由于可由s3经过s4到s1的循环而执行多次步骤s1,它可对应于根据本公开的步骤a1、a2、a-n和a3。
[0144]
可使用相继帧之间的多普勒相位,估计应变,可通过使用b型图像数据中的斑点跟踪来补全该多普勒相位。b型斑点跟踪能够处理大运动,并且通过研究斑点去相关,还可探测平面外的运动。在后一情况下,期望的是,丢弃数据点。
[0145]
在可选的步骤s2中,确定swe和/或尤其是应变数据是否保持在第一预定范围中。如果它们并非保持在第一预定范围内,可丢弃所收集的数据,并重复步骤s1。同时,用户界面可请求使用者尽可能久地保持在恒定压缩级。
[0146]
如果swe和/或尤其是应变数据点保持在第一预定范围内,则在步骤s3中选择和/或记录所收集的数据,以用于对应于本变形级的数据集合1
……
n中。相应地,在可选的步骤s2中,可应用数据量化条件,根据该数据量化条件,可仅保留方差足够小的应变和/或杨氏模量。
[0147]
在所记录的数据集合1
……
n的数量小于或等于预定数值n的情况下,所述方法随后在步骤s4中继续。n可以是整数,例如2或更大。在步骤s4中,给介质施加变形变化(即压缩或解除压缩)。例如,当(例如基于所收集的应变数据点)确定变形级显著地改变(例如超过预定容差范围),所述方法可触发步骤s4。期望的是,在所述变形改变期间,仅收集应变数据点。步骤s4可由此对应于本公开的步骤a3。例如,一旦在步骤s3中收集并记录了有效的弹性
数据,就可以向使用者提供反馈(口头、视觉的等),以从一个变形级移动到另一个变形级。可例如通过视觉指示器或显示上的文本,或替代地通过声学或触觉信号,引导使用者。
[0148]
例如,可执行步骤s4,直至变形级达到预定阈值x。所述阈值x可确定为相对于之前的收集步骤s1中的变形级的相对变形改变。例如,它可限定为预定的应变差异,例如相对于之前的步骤s1中的级的5%的应变增大或减小。可替代地,可执行步骤s4,直至变形改变减小,并且变形级由此达到大致恒定的级。例如,执行步骤s4,直至swe和/或尤其是应变数据点保持在第一预定范围或任何其它预定范围内。在步骤s3中的数据集合的数量n(和由此,对应的变形级数量)变得大于n,可确定已经收集了足够的数据。然后,所述方法以步骤s5继续。在步骤s5中,估计nl-swe。由此,步骤s5可对应于根据本公开的步骤b1和b2。
[0149]
在本公开中用于估计nl-swe的nl-swe模型可具有一阶模型:
[0150][0151]
其中,e(∈)是在应变∈的应变约束下的杨氏模量。e0=e(0)是无约束的杨氏模量,a是要估计的nl-swe参数。
[0152]
总之,在步骤s1至s4中,采集(收集或获取)估计nl-swe所基于的数据。在步骤s1中,期望计算当减小探头运动时,不同帧上(即不同时间)的e和∈(参见步骤s2)。引导采集,以在期望的静态阶段(即大致恒定的变形级)中执行。相应地,只要探头保持在0阶段(即当应变和期望地swe因此不过多改变),收集一个或多个数据点(参见步骤s3)。在当前阶段采集之后,可例如请求使用者单向移动(压缩或释放)到接下来的阶段,同时仅监控应变(参见s4)。可重复所述循环s1至s4,直至采集足够的数据点。可例如通过视觉指示器或显示上的文本,或替代地通过声学或触觉信号,引导使用者。可从例如压缩序列或解除压缩序列的各个阶段中采集数据。应变也可以通过连续按压或连续释放、或通过跟随目标的非单调步骤来施加。
[0153]
在步骤s1至s4中的采集之后,可在步骤s5中,成对地处理数据点,以通过例如以下,确定各自的梯度r
ij
:
[0154][0155]
其中,e是根据波弹性数据点确定的介质的杨氏模量系数,∈是表示变形级的应变系数,其中,指数i表示第一级,指数j表示第二变形级.
[0156]
非线性弹性系数a可以通过关联到r,使得可对于每个(数据点)对,量化nl-swe信息:
[0157][0158]
给定n个数据点,这些参数的数据量是(n-1)n/2。因此,要处理的数据量可从n增大到n(n-1)/2,而不延长采集时长。
[0159]
在另一示例中,可将梯度概括为:
[0160]
[0161]
其中,i1,i2,
…
,ik是表示k(k≥2)个不同变形级的指数。相应地,因此,在成对的点上定义的斜率(参见例如上面的公式(2))可以因此被推广到在数量为k(k》2)的点的子集上定义的斜率。
[0162]
然后,可计算a
ij
的方差,即例如,可通过以下估计该方差:
[0163][0164]
其中,可在每个像素的邻域(附近),估计杨氏模量的差异(即e
i-ej)的平均值和方差类似地,可估计应变差异(即∈
i-∈j)的平均值和方差所述邻域可以是空间的和/或时间的。对于时间邻域,期望的是,使用同一变形级对中的点来计算平均值和方差。
[0165]
可选地,可施加geary-hinkley变换(ght),以改善方差估计的准确度,尤其是对于可用ght更好地考虑到的像素关联:
[0166][0167]
其中,指(e
i-ej)与(∈
i-∈j)之间的协方差。换句话说,ght提供对a
ij
的方差的更准确的估计。如在下文中所述的,最小方差估计器可使用a
ij
的方差,作为用于得出优化权重的输入。
[0168]
然后,可通过优化,制定线性最小方差估计器:
[0169][0170]
其中,w
ij
是要推导出的加权分数,并且其中,a
ij
是要估计的非线性剪切波弹性参数。
[0171]
使用所提出的线性最小方差估计器的益处在于可显著地提高估计鲁棒性和可再现性。
[0172]
可通过以下估计分数w
ij
:
[0173][0174]
其中,var指代方差,是由每个非线性剪切波弹性参数a
ij
得出的分数,是非线性剪切波弹性参数a
ij
的逆方差估计,是非线性剪切波弹性参数a
mn
的逆方差估计,其中,指数m和n遍历剪切波弹性数据点的所有成对组合:1《=m《=n,m《n《=n,其中,n是数据点个数。
[0175]
优化产生了权重w
ij
,以应用于a
ij
从而线性地加权每个估计的参数。最终nl-swe参数估计由该经过加权的平均值给出:
[0176][0177]
而且,该方法可以在步骤s5之后,包括置信度估计步骤(在图4中未示出)。所述步
骤可包括根据该至少一个分数和非线性剪切波弹性参数a
mn
的方差估计确定关于最小方差估计器的置信度的统计学模型,生成包括对于非线性剪切波弹性图的像素的置信度信息的置信度图。相应地,可通过计算的方差,以估计nl-swe估计的置信度。
[0178]
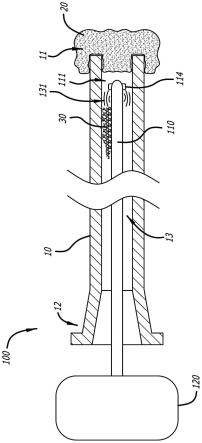
图5示出根据本公开的实施例的超声系统的一个示例性实施例。系统1可配置为估计介质的非线性剪切波弹性。
[0179]
具体地说,图5所示的超声系统1可配置为提供粘弹性介质2的超声波图像数据。响应于压缩超声波,系统发生散射。介质可以是例如人体或动物体,例如在临床或医学应用中的病人身体的一部分(乳房、肝脏、腹部等)。该系统1还配置为监控弹性剪切波的传播,以能够提供介质2的弹性的图像数据。
[0180]
例如通过处理单元(例如计算机或微型计算机)4,产生介质的图像数据。处理单元4可包括例如位于相同区域或不同位置(包括云计算部分)的输入界面4b(例如键盘或类似的)和输出界面4a(例如屏幕或类似的),或使得压缩超声波从介质2的外表面3被发送到介质2中的任何其它电子中央单元。所述波与包含在介质2中的散射颗粒5相互作用,这些颗粒对于压缩超声波是反射性的。颗粒5可以由介质2的任何异质性构成,并且尤其是在涉及医学应用时,由存在于人体组织中的胶原蛋白颗粒构成(这些颗粒在超声波图像上形成称作“斑点(speckle)”的点)。
[0181]
要指出的是,图5所示的系统仅是一个示例。系统还可具有任何其它架构。例如,系统的部分可以是分布式的和/或对于彼此是远程的。在一个示例中,处理单元4、探头6和/或电子隔间7可以位于不同房间或建筑物中。
[0182]
为了观察介质2并生成介质的图像数据,可使用布置为抵着被观察的介质2的外表面3的超声波探头6。该探头沿着z轴,以例如0.5至100mhz、优选地0.5至15mhz、例如大约4mhz的频率,发送回波成像中常用类型的压缩超声波脉冲。
[0183]
超声波探头6可由n个超声波换能器t1、t2、
……
、ti、
……
、tn的阵列构成,n是大于或至少等于1的整数。
[0184]
探头6的形式可例如是可包括例如n=128或256或1024个沿着垂直于z轴的x轴排齐的换能器的线性阵列。所涉及的探头也可是换能器的二维或三维阵列(平面或非平面的)。
[0185]
换能器t1、t2、
……
、tn可彼此独立地由处理单元4控制,可能地经由包含在例如通过柔性线缆连接到探头6的电子隔间7中的中央处理单元(cpu)。
[0186]
换能器t1至tn可由此选择性地发射:
[0187]
·“平面”压缩超声波(即在该情况下,其波前在xz平面中是直线的波),或任何其它类型的非聚焦波照亮介质2中的整个观察域,例如通过使得各个换能器t1至tn发射随机声信号的波,
[0188]
·
或聚焦在介质2的一个或多个点上的压缩超声波。
[0189]
可选地,可应用多个非聚焦压缩波、例如不同角度的平面波的合成成像技术。可组合这些平面波的各自的回波,以获得具有改善的质量的介质的图像数据。
[0190]
在包括权利要求在内的整个说明中,除非另有说明,否则术语“包括一个”应理解为与“包括至少一个”同义。此外,除非另有说明,否则包括权利要求的说明中提出的任何范
围都应理解为包括其一个或多个端点值。所述元件的具体值应理解为在本领域技术人员已知的可接受的制造或工业容差内,并且对术语“大致”和/或“大约”和/或“一般”的任何使用应理解为指落入这样的可接受的容差内。
[0191]
尽管在本文中参照具体实施例说明了本公开,要理解的是,这些实施例对于本公开的原理和应用仅是示意性的。
[0192]
本说明书和示例旨在视为仅是示例性的,本公开的真正范围由以下权利要求指示。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。