技术特征:
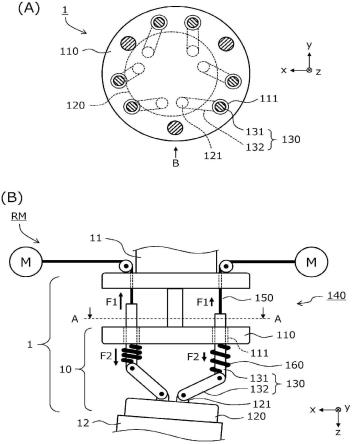
1.一种关节结构,其特征在于,将机器人的机械手的第一部件与第二部件之间连结,所述关节结构具有斯图尔特平台,所述斯图尔特平台能够控制所述第二部件相对于所述第一部件的相对的位置及/或角度,所述斯图尔特平台具有:第一构件,接合于所述第一部件;第二构件,接合于所述第二部件;多个脚,将所述第一构件与所述第二构件连接;驱动机构,为了改变所述第二构件相对于所述第一构件的相对的位置及/或角度而使各脚的有效长度变化;以及软性机构,在对所述第二构件作用外力的情况下,使所述脚的有效长度弹性地变化,在脱离所述外力的情况下,使所述脚的有效长度复原。2.根据权利要求1所述的关节结构,其特征在于,所述脚具有杆,所述杆被支承体支承为滑动自如,并通过进行滑动而使所述脚的有效长度变化,所述驱动机构具有:线状构件,安装于所述杆,具有可挠性;以及弹性构件,当拉伸所述线状构件而使所述杆滑动时,所述弹性构件发生弹性变形,产生对抗所述线状构件的拉伸力的弹性复原力。3.根据权利要求2所述的关节结构,其特征在于,所述弹性构件兼作所述软性机构。4.根据权利要求3所述的关节结构,其特征在于,所述弹性构件包括非线性弹簧部件,通过所述线状构件的拉伸量来改变所述弹性构件的变形量,而所述软性机构的刚性是可变的。5.根据权利要求2所述的关节结构,其特征在于,所述支承体是设置于所述第一构件的轴承。6.根据权利要求2所述的关节结构,其特征在于,所述支承体是设置于所述脚并供所述杆滑动自如地插入的缸体构件。7.根据权利要求2所述的关节结构,其特征在于,所述线状构件的端部被拉出到所述关节结构的外侧,并连接于与所述关节结构分开设置的驱动源。8.根据权利要求1所述的关节结构,其特征在于,所述脚具有杆,所述杆通过在长度方向上移动而使所述脚的有效长度变化,所述驱动机构是通过压缩性流体使所述杆在所述杆的长度方向上移动的致动器。9.根据权利要求8所述的关节结构,其特征在于,所述致动器的所述压缩性流体兼作所述软性机构。10.根据权利要求8所述的关节结构,其特征在于,所述致动器是气缸。11.根据权利要求8所述的关节结构,其特征在于,
用于对所述致动器进行所述压缩性流体的供给/排出的管被拉出到所述关节结构的外侧,并连接于与所述关节结构分开设置的驱动源。12.根据权利要求1至11中任一项所述的关节结构,其特征在于,所述关节结构还具有锁定机构,所述锁定机构进行自由状态与锁定状态的切换,所述自由状态是所述第二部件独立于所述第一部件而成为运动自如的状态,所述锁定状态是所述第二部件被固定于所述第一部件的状态。
技术总结
将机器人的第一部件与第二部件之间连结的关节结构,具有能够控制所述第二部件相对于所述第一部件的相对的位置及/或角度的斯图尔特平台。所述斯图尔特平台具有:第一构件,接合于所述第一部件;第二构件,接合于所述第二部件;多个脚,将所述第一构件与所述第二构件连接;驱动机构,为了改变所述第二构件相对于所述第一构件的相对的位置及/或角度而使各脚的有效长度变化;以及软性机构,在对所述第二构件作用外力的情况下,使所述脚的有效长度弹性地变化,在脱离所述外力的情况下,使所述脚的有效长度复原。有效长度复原。有效长度复原。
技术研发人员:田中一敏
受保护的技术使用者:欧姆龙株式会社
技术研发日:2021.05.20
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。