1.本技术涉及医疗器械领域,特别是涉及稳定夹持的穿刺夹钳。
背景技术:
2.内镜夹钳是腹腔镜、胸腔镜手术中经常使用到的手术器械,比如无创伤抓钳、持针钳等;主要目的就是通过微创手术方式达到手术目的。例如公开号为cn211381619u的中国专利文献公开的一种内镜钳,该内镜钳包括:钳体、导管和夹持部。
3.随着治疗手段的进步,医护人员发现现有的内镜夹钳功能过于单一,不能在单孔腔道内实现多种功能。比如无创伤夹钳只能抓夹组织,不能观察、切开、放导丝等功能。例如在需要对心包进行作业的手术中,需要对心包进行切割以实现导丝的介入,现有技术无法满足临床需求。
4.例如公开号为cn102458291a的中国专利文献公开了一种用在电外科中的外科工具组件,包括能沿纵向方向移动的伸长外壳。该组件包括一对钳夹,每个钳夹都具有多个用于抓持组织的齿和支撑所述多个齿的支撑元件。该支撑元件部分地设置在外壳内并延伸到设置在外壳外部的远端。
5.发明人认为,现有技术中技术方案仍有改进空间。
技术实现要素:
6.为了解决上述技术问题,本技术公开了稳定夹持的穿刺夹钳,包括:
7.控制手柄,所述控制手柄上设置有第一驱动组件;
8.夹钳组件,设置在所述控制手柄上并受控于所述第一驱动组件;
9.所述夹钳组件的远端具有相互配合的两钳臂,两钳臂之间绕一轴线转动配合,各钳臂具有处在轴线一侧的工作部和另一端的传动部,两钳臂的工作部之间具有相对的并拢位置和开口位置;两钳臂的工作部相向的一侧分别带有凹陷区,两钳臂在并拢位置下,两钳臂的工作部上的凹陷区围成容置空间。
10.以下还提供了若干可选方式,但并不作为对上述总体方案的额外限定,仅仅是进一步的增补或优选,在没有技术或逻辑矛盾的前提下,各可选方式可单独针对上述总体方案进行组合,还可以是多个可选方式之间进行组合。
11.可选的,所述工作部包括
12.夹持段,所述夹持段上设有齿状结构,两钳臂的夹持段相互啮合;
13.容置段,所述容置段设有所述凹陷区;
14.连接段,两钳臂的连接段用于实现转动配合。
15.两钳臂的容置段相互合围形成容置空间,能够对夹持的物体提供收容空间,从而在保证被夹持物体完整性的同时提高夹持力。
16.可选的,两钳臂的夹持段的远端侧相向收敛,且与所述容置段平滑过渡。
17.相向收敛的远端能够得到更小的尺寸,从而提供功能改进的结构基础。
18.可选的,两钳臂在并拢位置下,两夹钳的连接段之间设有夹持间隙,所述夹持间隙与所述容置空间连通。
19.夹持间隙可以进一步扩充容置空间的尺寸。避免因为钳臂的相互靠拢导致不必要的损伤。
20.可选的,两钳臂的凹陷区形状对称设置且在所述安装通道的轴向延伸。
21.可选的,在两钳臂转动配合的轴线方向的投影上,所述容置空间的投影形状面积至少占两钳臂外轮廓投影形状面积的25%。
22.可选的,所述夹钳组件内设有自近端向远端延伸的安装通道;所述穿刺夹钳还包括穿刺刀,所述穿刺刀的远端具有伸入所述容置空间的穿刺位以及撤离所述容置空间的初始位;
23.所述控制手柄还设有第二驱动组件,所述穿刺刀活动安装于所述安装通道内并受控于所述第二驱动组件。
24.可选的,在两钳臂转动配合的轴线方向上,各钳臂的中部设有引导槽,所述引导槽自所述钳臂的近端侧延伸至远端侧,位于穿刺位的所述穿刺刀的侧缘分别位于两钳臂的引导槽内。
25.可选的,两钳臂的远端侧相向收敛且对应部位的引导槽开放于两钳臂相背的侧面。
26.可选的,所述穿刺夹钳还包括内窥镜组件,所述内窥镜组件包括套设于所述夹钳组件上的内窥管,所述内窥管内设有供内窥镜穿设的引导管路,所述引导管路的远端侧轴线指向所述容置空间。
27.可选的,所述引导管路整体与所述安装通道平行设置。
28.可选的,所述引导管路的远端侧弯折以指向所述容置空间。
29.指向容置空间的引导管路能够引导内窥镜稳定观察容置空间,同时弯折的部位能够实现定位内窥镜,增加内窥镜一定的移动阻力,保持内窥镜的稳定。
30.可选的,所述穿刺夹钳包括支撑管,所述支撑管的近端连接于所述控制手柄,所述支撑管的远端安装有所述夹钳组件的钳轴;
31.所述内窥管活动套设于所述支撑管上且所述内窥管的近端与所述控制手柄卡合定位。
32.可选的,所述引导管路的近端侧朝向远离所述支撑管的方向延伸且用于供内窥镜穿设。
33.本技术公开的技术方案通过钳臂的凹陷形成容置空间,从而更好的实现夹钳组件的对目标物体或者组织的夹持,容置空间还能实现夹持物体在空间上的堆叠,从而为下一步操作提供基础。
34.具体的有益技术效果将在具体实施方式中结合具体结构或步骤进一步阐释。
附图说明
35.图1为一实施例中穿刺夹钳示意图;
36.图2为图1中的穿刺夹钳的内部剖面示意图;
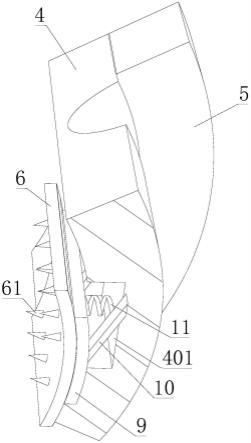
37.图3为图1中的穿刺夹钳远端部分内部结构剖视图;
38.图4为一实施例中夹钳组件的两钳臂示意图;
39.图5为图4中的两钳臂开启位置示意图;
40.图6为图4中的两钳臂并拢位置示意图;
41.图7为图1中的第一驱动组件装配图;
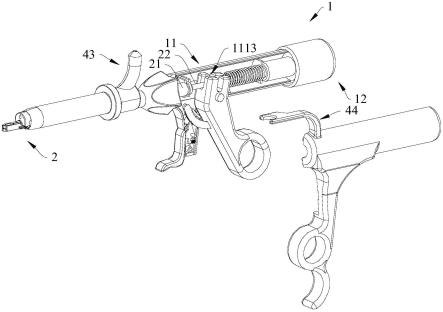
42.图8为图1中的穿刺夹钳立体结构示意图;
43.图9为图8中的穿刺夹钳的控制手柄内部装配示意图;
44.图10为图8中的穿刺夹钳的内部剖面示意图;
45.图11为图8中的穿刺夹钳的第二驱动组件的近端部位放大示意图;
46.图12为图1中的穿刺夹钳各管件爆炸示意图;
47.图13为图12中支撑管和驱动管的远端结构示意图;
48.图14为图1中的穿刺夹钳的夹钳组件开启位置示意图;
49.图15为图14中的穿刺夹钳的控制手柄内部部件位置关系示意图;
50.图16为图1中的夹钳组件处于并拢位置示意图;
51.图17为穿刺刀位于穿刺位时第二驱动组件状态示意图;
52.图18为图1中夹钳组件处于开启位置示意图。
53.图中附图标记说明如下:
54.1、控制手柄;
55.11、第一驱动组件;111、驱动摇臂;1111、驱动部;1112、施力部;1113、驱动槽;112、第一锁定组件;1121、棘齿;1122、棘爪;1123、锁定弹性件;1124、锁定释放件;113、固定臂;114、保持件;
56.12、第二驱动组件;121、复位件;122、操作件;1221、操作壳体;1222、操作杆;1223、第一旋转平面;
57.131、第一密封接口;132、第二密封接口;133、控制室;1331、第一腔室;1332、第二腔室;
58.2、夹钳组件;
59.21、支撑管;211、钳轴;2111、第一半轴;2112、第二半轴;2113、过刀间隙;212、旋转套;
60.22、驱动管;224、同步套管;2241、同步通道;225、驱动件;
61.23、钳臂;231、工作部;2311、凹陷区;2312、容置空间;2313、夹持段;2314、容置段;2315、连接段;2316、夹持间隙;232、传动部;233、夹持区;234、引导槽;
62.3、穿刺刀;31、穿刺部;32、控制管;321、控制部;322、第二旋转平面;
63.4、内窥镜组件;41、内窥管;42、引导管路;421、弯折;43、适配管;44、卡合臂。
具体实施方式
64.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
65.需要说明的是,当组件被称为与另一个组件“连接”时,它可以直接与另一个组件
连接或者也可以存在居中的组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。
66.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是在于限制本技术。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
67.参考附图1至附图18,本技术公开了稳定夹持的穿刺夹钳,包括:
68.控制手柄1,控制手柄1上设置有第一驱动组件11;
69.夹钳组件2,设置在控制手柄1上并受控于第一驱动组件11;
70.夹钳组件2的远端具有相互配合的两钳臂23,两钳臂23之间绕一轴线(可以由下文中提到的钳轴211实现,此处的轴线应理解为空间上的等效轴线,而非具体转轴部件)转动配合,各钳臂23具有处在轴线一侧的工作部231和另一端的传动部232,两钳臂23的工作部231之间具有相对的并拢位置(参考附图6)和开口位置(参考附图5);两钳臂23的工作部231相向的一侧分别带有凹陷区2311,两钳臂23在并拢位置下,两钳臂23的工作部231上的凹陷区2311围成容置空间2312。
71.夹钳组件2通过两钳臂23不同位置的切换来实现夹持和放开,相较于现有技术中完全啮合的两钳臂23而言,本技术公开的技术方案通过钳臂23的凹陷形成容置空间2312,从而更好的实现夹钳组件2的对目标物体或者组织的夹持,容置空间2312还能实现夹持物体在空间上的堆叠,从而为下一步操作提供基础。
72.在钳臂23的具体设置上,参考附图4所示的实施例中,工作部231包括
73.夹持段2313,夹持段2313上设有齿状结构,两钳臂23的夹持段2313相互啮合;
74.容置段2314,容置段2314设有凹陷区2311;
75.连接段2315,两钳臂23的连接段2315用于实现转动配合。
76.两钳臂23的容置段2314相互合围形成容置空间2312,能够对夹持的物体提供收容空间,从而在保证被夹持物体完整性的同时提高夹持力。连接段2315除了用于传递力矩外,还可以参考附图所示,两钳臂23在并拢位置下,两夹钳的连接段2315之间设有夹持间隙2316。进一步的,夹持间隙2316与容置空间2312连通。夹持间隙2316可以进一步扩充容置空间2312的尺寸。避免因为钳臂23的相互靠拢导致不必要的损伤。
77.在容置空间2312的具体形态上,两钳臂23的凹陷区2311形状对称设置且在安装通道的轴向延伸。在附图中,容置空间2312的形状为长条孔形,也可以设置为腰形,狗骨形,矩形,圆形等多种形状。不过需要满足以下条件:在两钳臂23转动配合的轴线方向的投影上,容置空间2312的投影形状面积至少占两钳臂23外轮廓投影形状面积的25%。在附图中,容置空间2312的投影形状面积占两钳臂23外轮廓投影形状面积的28%(含)以上。
78.在夹钳组件2的远端的外轮廓上,参考一实施例中,两钳臂23的夹持段2313的远端侧相向收敛(参见附图4中可见,附图4中的夹持段2313相较于容置段2314在图中左右方向上收敛),且与容置段2314平滑过渡。相向收敛的远端能够得到更小的尺寸,在例如针对心包介入的治疗过程中,较小尺寸的夹钳能够更好的完成剥离心包或者分层心包的作用。
79.下面实例性的给出一种基于容置空间2312实现的作业环境,参考一实施例中,夹钳组件2内设有自近端向远端延伸的安装通道;穿刺夹钳还包括穿刺刀3,穿刺刀3的远端具
有伸入容置空间2312的穿刺位以及撤离容置空间2312的初始位;
80.控制手柄1还设有第二驱动组件12,穿刺刀3活动安装于安装通道内并受控于第二驱动组件12。
81.穿刺刀3活动安装于安装通道内,从而能够对夹钳组件2夹持的物体进行穿刺作业,其中安装通道设置于安装夹钳组件2的管道内,并在轴向上延伸。在附图所示的实施例中,安装通道由驱动管22的管内空间实现。
82.在第二驱动组件12的具体设置上,参考附图11至附图17所示的实施例中,第二驱动组件12包括:
83.操作件122,活动安装于控制手柄1上,穿刺刀3的近端延伸至控制手柄1内并与操作件122联动;
84.复位件121,设置于控制手柄1和穿刺刀3之间,复位件121用于将穿刺刀3保持在初始位(参考附图11);
85.操作件122用于驱动穿刺刀3克服复位件121进入穿刺位(参考附图17)。在具体的周向转动配合部位上,如附图所示,操作件122包括暴露于控制手柄1外部的操作壳体1221和延伸至控制手柄1内部的操作杆1222,操作杆1222与控制管32的近端的端部轴向相抵且周向释放。
86.轴向相抵的操作杆1222和控制管32能够实现轴向作用力的传递,从而实现将穿刺刀3驱动进入或退出穿刺位,周向释放的操作杆1222和控制管32能够避免操作件1222将轴向作用力传递至控制管32上,实现一定程度的安全隔离。
87.操作壳体1221用于直接承受医护人员施加的作用力。在附图中,操作壳体1221为套设在控制手柄1近端的筒状,能够为操作件122整体的运动路径提供引导,更重要的是,能够将操作杆1222进入控制手柄1的部位遮蔽,提供一定的保护效果。
88.在操作杆1222由近端向远端延伸的过程中,操作壳体1221滑动安装于控制手柄1的近端侧,操作杆1222自控制手柄1近端侧端面的第一密封接口131延伸至控制手柄1内部。第一密封接口131可以设置为开设在控制手柄1近端侧端面的预设尺寸的孔洞,也可以参考附图中所示,为单独设置的配合盘,配合盘外周面设有螺纹或者卡合结构以方便实现于控制手柄1的安装与拆卸,其中操作杆1222与配合盘密封滑动连接。在控制手柄1内部设有控制室133,操作杆1222的远端延伸至控制室133内,操作杆1222的远端设有第一旋转平面1223,第一旋转平面1223用于与穿刺刀3实现轴向传递力矩的同时周向释放状态下的转动配合。
89.与操作杆1222同理的,穿刺刀3自远端延伸至控制手柄1内部,穿刺刀3包括用于穿刺的穿刺部31和延伸至近端的控制管32,控制管32活动穿设在安装通道内。即控制管32的近端贯穿控制手柄1的远端侧并延伸至控制手柄1的近端侧。在控制管32由远端向近端延伸的过程中,控制室133上设有供控制管32穿设的第二密封接口132。第二密封接口132可以参考第一密封接口131所述,在此不再赘述。
90.控制管32的近端设有与操作件122(在本实施例中为上文中提到的操作杆1222)配合的控制部321,控制部321上设有第二旋转平面322,第二旋转平面322,用于与操作杆1222实现轴向传递力矩,且周向上处于释放状态。
91.即附图17中所示的,第一旋转平面1223和第二旋转平面322轴向相抵且周向上处
于释放状态。第一旋转平面1223和第二旋转平面322在轴向上可以双向传动设置也可以单向传动设置,在轴向相抵的过程中,第一旋转平面1223和第二旋转平面322能够在保持贴合的过程中在控制室133的轴向上运动。
92.因此不难看出,控制室133提供了一个相对封闭的空间实现穿刺刀3和操作件122配合关系以及运动行程。在行程控制的理解上,参考附图11以及附图17中,当穿刺刀3位于初始位时,操作杆1222的近端侧壁与控制室133的近端侧壁相抵;当穿刺刀3位于穿刺位时,控制部321的远端侧壁与控制室133的远端侧壁相抵。该设置通过控制室133对于控制部321运动行程的约束实现对穿刺刀3(尤其是穿刺部31)的行程控制,从而实现下文中提到的,位于穿刺位的穿刺刀3不伸出夹钳组件2的远端的端面,降低安全风险。
93.为了优化控制手柄1内部部件布局,第二驱动组件12的其他部件也可以设置在控制室133内,参考一实施例中,复位件121为绕设在控制管32上的弹性件且弹性件的两端分别抵压于控制部321的远端侧壁和控制室133的远端侧壁。因为控制室133和控制手柄1为固定设置,在力学传递关系上,也可以理解为复位件121设置在控制部321和控制手柄1之间。
94.在控制室133的尺寸设置上,控制室133在控制管32轴向上延伸,控制管32的近端和操作杆1222的远端分别自两侧延伸至控制室133内。第一密封接口131的开口尺寸小于操作杆1222的远端的径向尺寸,第二密封接口132的开口尺寸小于控制管32的近端的径向尺寸。该设置能够实现控制室133对于部件运动行程约束,进一步提高部件集成度。
95.在形态上,控制室133包括相互连通的第一腔室1331和第二腔室1332,其中第一腔室1331的内径小于第二腔室1332,第二腔室1332用于供操作杆1222和控制管32配合以及运动,复位件121至少一部分收容于第一腔室1331。复位件121设置为附图中所示的卷簧时,复位件121具有完全收容于第一腔室1331的储能状态和相对应的释放状态,储能状态的复位件121能够驱动穿刺刀3回到初始位。
96.穿刺刀3的驱动效果最终需要与夹钳组件2相互配合,夹钳的工作依赖于第一驱动组件11。参考一实施例中,夹钳组件2包括:
97.支撑管21,支撑管21的近端连接于控制手柄1,支撑管21的远端安装有钳轴211;
98.驱动管22,滑动安装在支撑管21内,驱动管22的近端与第一驱动组件11联动;
99.钳臂23,设有多个且成对设置,各钳臂23铰接于钳轴211,各钳臂23具有处在钳轴211一侧的工作部231和相对的传动部232,各钳臂23的工作部231之间为夹持区233,传动部232连接至驱动管22远端;
100.第一驱动组件11包括用于保持驱动管22相对控制手柄1相对位置的保持件114和用于驱使驱动管22运动的驱动摇臂111,保持件114作用于驱动摇臂111和控制手柄1之间。
101.其中参见附图所示,保持件114和复位件121可以设置为同轴套设,以提高空间利用率。实际产品中,两者并不会相互干涉,因为控制室133的侧壁将两者隔开,以避免不必要的风险。从原理上来看,两者也可以同轴同外外径设置。
102.在第一驱动组件11其他部件的具体结构上,结合附图7所示,第一驱动组件11包括转动安装于控制手柄1上的驱动摇臂111,驱动摇臂111包括用于驱使驱动管22运动的驱动部1111和延伸至控制手柄1外部的施力部1112。驱动摇臂111为第一驱动组件11的实际的做功部件。第一驱动组件11还包括作用于施力部1112和控制手柄1之间的第一锁定组件112,第一锁定组件112用于保持驱动摇臂111和控制手柄1的相对位置关系。第一锁定组件112包
括固定安装在施力部1112上的棘齿1121,转动安装在控制手柄1上的棘爪1122,用于保持棘爪1122位置的锁定弹性件1123,以及驱动棘爪1122释放棘齿1121的锁定释放件1124。控制手柄1上还有与驱动摇臂111相对的固定臂113,其中棘爪1122,锁定弹性件1123以及锁定释放件1124安装于固定臂113上。固定臂113与控制手柄1固定连接以及相对驱动摇臂111设置,方便医护人员的握持以及操作。第一驱动组件11还包括保持驱动管22相对控制手柄1相对位置的保持件114,保持件114作用于驱动摇臂111和控制手柄1之间。驱动摇臂111在驱动过程中克服保持件114的保持力。第一驱动组件11以及第一锁定组件112的各部件的工作过程、装配关系以及原理本领域技术人员根据附图能够毫无疑义的得知,在此不再赘述。
103.关于第一驱动组件11与驱动管22的驱动实现方式参考一实施例中,驱动管22上固定有驱动件225,驱动摇臂111的驱动部1111与驱动件225配合以驱使驱动管22相对于支撑管21运动;在驱动管22的轴向上,驱动件225和驱动部1111之间为双向传动。驱动摇臂111的驱动部1111至少设有一驱动槽1113,驱动件225位于驱动槽1113内,在驱动管22的轴向上,驱动槽1113的两侧壁与驱动件225实现双向配合。在驱动件225的细节上,驱动件225为径向尺寸大于驱动管22的球体。本实施例的设置的优点在于能够通过驱动摇臂111实现驱动管22的双向传动,从而避免因为夹钳组件2受力而导致的驱动管22卡滞的情况,提高了夹钳组件2工作的稳定性。
104.在本技术中,穿刺刀3滑动安装在驱动管22内,结合附图可知,穿刺刀3自两钳臂23的形成的夹钳内进入穿刺位。为了克服钳轴211对于穿刺刀3运动路径的干涉,可以选择采用异形轴,即改变轴的轴线延伸路径来避让,也可以参考一实施例中,钳轴211包括同轴设置的第一半轴2111和第二半轴2112,第一半轴2111和第二半轴2112之间为过刀间隙2113,穿刺刀3经由过刀间隙2113进入穿刺位。过刀间隙2113能够实现穿刺刀3对两钳臂23的夹持区233实现直接作用。第一半轴2111和第二半轴2112分别固定在支撑管21远端的侧壁上,且相对设置。
105.为了进一步提高钳臂23与穿刺刀3的配合效果,参考一实施例中,在两钳臂23转动配合的轴线方向上,各钳臂23的中部设有引导槽234,引导槽234自钳臂23的近端侧延伸至远端侧,位于穿刺位的穿刺刀3的侧缘分别位于两钳臂23的引导槽234内。引导槽234能够提高穿刺刀3的稳定性。参考附图4至附图6所示的实施例中,两钳臂23的远端侧相向收敛且对应部位的引导槽234开放于两钳臂23相背的侧面。在实际产品中,处于穿刺位的穿刺刀3相较于夹钳组件2的远端缩进,避免对周围组织烧成不必要的伤害。换言之,穿刺刀3的远端侧不伸出引导槽234的远端侧。
106.为了提高穿刺夹钳的适应性,在一些治疗案例中,夹钳组件2可能需要相对于控制手柄1产生一定的旋转。在旋转的实现上,支撑管21的近端设有与控制手柄1转动连接的旋转套212,旋转套212能够实现支撑管21的旋转从而带动钳轴211的旋转,进一步实现夹钳组件2的旋转。同时夹钳组件2的旋转能够带动驱动管22转动。
107.同理的,穿刺刀3也需要同步夹钳组件2的旋转,在旋转的实现形式上,可以单独旋转,也可以联动旋转。具体联动路径可以通过驱动管22带动穿刺刀3转动;或者旋转套212带动驱动管22,驱动管22带动同步套管224,同步套管224带动穿刺刀3来实现。在联动旋转的设置中,穿刺刀3和第二驱动组件12之间可以分离设置以免第二驱动组件12的驱动力对联动产生影响,具体分离方式可以参见上文中关于“操作件与穿刺刀的近端的端部轴向相抵
且周向释放”的描述,在此不再赘述。
108.参考附图3所示,穿刺夹钳还包括内窥镜组件4,内窥镜组件4包括套设于夹钳组件2上的内窥管41,内窥管41内设有供内窥镜穿设的引导管路42,引导管路42的远端侧轴线指向容置空间2312。引导管路42主要用于实现内窥镜的穿设和引导,尤其在远端部位,能够稳定内窥镜的视角,从而保证稳定的观察。引导管路42整体与安装通道平行设置,保证器械整体的路入尺寸。引导管路42的远端侧弯折以指向容置空间2312。本实施例中,引导管路42与安装通道非同轴设置,因此通过弯折421来实指向容置空间,实现引导内窥镜稳定观察容置空间;同时弯折421的部位能够实现定位内窥镜,增加内窥镜一定的移动阻力,保持内窥镜的稳定。定位内窥镜的功能也可以通过引导管路42的局部缩径来实现。同理的,定位内窥镜的弯折或者局部缩径也可以设置在引导管路42内任意合适的位置。
109.与远端侧独立的,引导管路42近端侧朝向远离安装通道的方向延伸且用于供内窥镜穿设。在附图中,表现为内窥管1的近端设有适配管43,适配管43的朝向设置能够方便内窥镜的路入,因此适配管43内的引导管路42平滑延伸,避免对内窥镜的运动产生影响,定位内窥镜的弯折或者局部缩径除外。
110.在本实施例中,内窥镜组件4还可以选择性安装。参考附图中,内窥管41活动套设于支撑管21上且内窥管41的近端与控制手柄1卡合定位。活动套设的内窥管41还能够隔离支撑管21可能的旋转,例如上文中提到的夹钳组件2需要转动的情况。
111.具体的,控制手柄1上设有与适配管43配合的卡合臂44,卡合臂44在保持内窥管41的相对位置的同时还能够为设置卡合结构提供基础,或者自身即可作为卡合结构。
112.本实施例中内窥镜外置且灵活搭配的设置方式能够有效缩小夹钳组件2以及第一驱动组件11的尺寸,从而为穿刺夹钳的灵活设置提供基础。
113.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。不同实施例中的技术特征体现在同一附图中时,可视为该附图也同时披露了所涉及的各个实施例的组合例。
114.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。