技术特征:
1.一种用于在可移动物体环境中绘图的系统,包括:无人飞行器uav;紧凑有效载荷,经由适配器设备耦接至所述uav,所述紧凑有效载荷包括配置为使用参照时钟信号进行同步的扫描传感器、一个或多个相机、以及惯性导航系统ins,所述紧凑有效载荷还包括至少一个第一处理器和第一存储器,所述第一存储器包括指令,所述指令在由所述至少一个第一处理器执行时,使所述至少一个第一处理器:从所述扫描传感器获得绘图数据;从所述一个或多个相机中的第一相机获得特征数据;从所述ins获得定位数据;至少基于所述参照时钟信号将所述绘图数据与所述定位数据关联,以生成经地理参照的数据;以及将所述经地理参照的数据和所述特征数据存储到可移除存储介质。2.根据权利要求1所述的系统,其中,所述uav包括定位传感器,其中,用于从所述ins获得定位数据的指令在由所述处理器执行时还使所述至少一个第一处理器:使用基于所述定位传感器和所述紧凑有效载荷之间的距离的变换,基于从所述定位传感器接收的第二定位数据更新从所述ins获得的所述定位数据。3.根据权利要求2所述的系统,其中,所述定位传感器是实时动态rtk传感器。4.根据权利要求1所述的系统,还包括:客户端装置,包括至少一个第二处理器和第二存储器,所述第二存储器包括指令,所述指令在由所述至少一个第二处理器执行时,使所述至少一个第二处理器:从所述一个或多个相机中的第二相机接收图像数据;以及显示所述图像数据,所述图像数据包括表示所述紧凑有效载荷的视点的实时图像数据。5.根据权利要求4所述的系统,其中,所述指令在被执行时还使所述至少一个第二处理器:从uav相机接收查看第二图像数据的请求,所述uav相机被合并到所述uav;以及显示所述第二图像数据,所述第二图像数据包括表示所述uav的视点的实时图像数据。6.根据权利要求4所述的系统,其中,所述指令在被执行时还使所述至少一个第二处理器:从所述紧凑有效载荷接收所述绘图数据的表示;以及显示所述绘图数据的表示,所述绘图数据的表示包括由所述扫描传感器捕捉的所述绘图数据的稀疏图表示。7.根据权利要求6所述的系统,其中,所述指令在被执行时还使所述至少一个第二处理器:在gps图上叠加所述绘图数据的表示。8.根据权利要求1所述的系统,其中,所述指令在被执行时还使所述至少一个第一处理器:将所述经地理参照的数据与从所述一个或多个相机中的第二相机获得的颜色数据关联。
9.根据权利要求1所述的系统,其中,所述适配器设备向所述紧凑有效载荷提供电力,并管理所述uav和所述紧凑有效载荷之间的命令和/或传感器数据的通信。10.根据权利要求1所述的系统,其中,所述扫描传感器包括光探测和测距lidar传感器。11.根据权利要求10所述的系统,其中,所述lidar传感器具有大约70度的视野。12.根据权利要求1所述的系统,其中,所述第一相机是包括机械快门的单目灰度相机。13.根据权利要求1所述的系统,其中所述ins包括惯性测量单元imu传感器。14.根据权利要求1所述的系统,还包括:计算装置,包括至少一个第二处理器和第二存储器,所述第二存储器包括指令,所述指令在由该所述至少一个第二处理器执行时,使所述至少一个第二处理器:从所述可移除存储介质中获得所述特征数据和所述经地理参照的数据;和基于所述特征数据和所述经地理参照的数据生成至少一个局部图。15.根据权利要求1所述的系统,其中,所述指令在被执行时还使所述至少一个第一处理器:对所述绘图数据进行下采样以生成稀疏点云,以用于在客户端装置上进行实时可视化。16.根据权利要求1所述的系统,其中,基于校准固有参数在所述扫描传感器、所述一个或多个相机以及所述惯性导航系统ins之间执行校准。17.一种用于在可移动物体环境中绘图的方法,包括:从耦接至无人飞行器uav的紧凑有效载荷的扫描传感器获得绘图数据,所述紧凑有效载荷包括配置为使用参照时钟信号进行同步的所述扫描传感器、一个或多个相机、以及惯性导航系统ins;从所述一个或多个相机中的第一相机获得特征数据;从所述ins获得定位数据;至少基于所述参照时钟信号将所述绘图数据与所述定位数据关联,以生成经地理参照的数据;以及将所述经地理参照的数据和所述特征数据存储到可移除存储介质。18.根据权利要求17所述的方法,还包括:使用基于所述定位传感器和所述紧凑有效载荷之间的距离的变换,基于从所述uav的定位传感器接收的第二定位数据更新从所述ins获得的所述定位数据。19.根据权利要求18所述的方法,其中所述定位传感器是实时动态rtk传感器。20.根据权利要求17所述的方法,还包括:由与所述uav通信连接的客户端装置从所述一个或多个相机中的第二相机接收图像数据;以及由所述客户端装置显示所述图像数据,所述图像数据包括表示所述紧凑有效载荷的视点的实时图像数据。21.根据权利要求20所述的方法,还包括:从uav相机接收查看第二图像数据的请求,所述uav相机被合并到所述uav;以及显示所述第二图像数据,所述第二图像数据包括表示所述uav的视点的实时图像数据。
22.根据权利要求20所述的方法,还包括:从所述紧凑有效载荷接收所述绘图数据的表示;以及显示所述绘图数据的表示,所述绘图数据的表示包括由所述扫描传感器捕捉的所述绘图数据的稀疏图表示。23.根据权利要求22所述的方法,还包括:在gps图上叠加所述绘图数据的表示。24.根据权利要求17所述的方法,还包括:将所述经地理参照的数据与从所述一个或多个相机中的第二相机获得的颜色数据关联。25.根据权利要求17所述的方法,其中,所述紧凑有效载荷经由适配器设备耦接至所述uav,所述适配器设备向所述紧凑有效载荷提供电力,并管理所述uav与所述紧凑有效载荷之间的命令和/或传感器数据的通信。26.根据权利要求17所述的方法,其中,所述扫描传感器包括光探测和测距lidar传感器。27.根据权利要求26所述的方法,其中,所述lidar传感器具有大约70度的视野。28.根据权利要求17所述的方法,其中,所述第一相机是包括机械快门的单目灰度相机。29.根据权利要求17所述的方法,其中,所述ins包括惯性测量单元imu传感器。30.根据权利要求17所述的方法,还包括:由计算装置从所述可移除存储介质中获得所述特征数据和所述经地理参照的数据;以及由所述计算装置基于所述特征数据和所述经地理参照的数据生成至少一个局部图。31.根据权利要求17所述的方法,还包括:对所述绘图数据进行下采样以生成稀疏点云,以用于在客户端装置上进行实时可视化。32.根据权利要求17所述的方法,其中,基于校准固有参数在所述扫描传感器、所述一个或多个相机以及所述惯性导航系统ins之间执行校准。33.一种非暂时性计算机可读存储介质,包括存储在其上的指令,当由至少一个处理器执行时,所述指令使所述至少一个处理器:从耦接至无人飞行器uav的紧凑有效载荷的扫描传感器获得绘图数据,所述紧凑有效载荷包括配置为使用参照时钟信号进行同步的所述扫描传感器、一个或多个相机、以及惯性导航系统ins;从所述一个或多个相机中的第一相机获得特征数据;从所述ins获得定位数据;至少基于所述参照时钟信号将所述绘图数据与所述定位数据关联,以生成经地理参照的数据;以及将所述经地理参照的数据和所述特征数据存储到可移除存储介质。34.根据权利要求33所述的非暂时性计算机可读存储介质,其中所述指令在被执行时还使所述至少一个处理器:
使用基于所述定位传感器和所述紧凑有效载荷之间的距离的变换,基于从所述uav的定位传感器接收的第二定位数据更新从所述ins获得的所述定位数据。35.根据权利要求34所述的非暂时性计算机可读存储介质,其中,所述定位传感器是实时动态rtk传感器。36.根据权利要求33所述的非暂时性计算机可读存储介质,其中,所述指令在被执行时还使所述至少一个处理器:从所述一个或多个相机中的第二相机接收图像数据;以及显示所述图像数据,所述图像数据包括表示所述紧凑有效载荷的视点的实时图像数据。37.根据权利要求36所述的非暂时性计算机可读存储介质,其中所述指令在被执行时还使所述至少一个处理器:从uav相机接收查看第二图像数据的请求,所述uav相机被合并到所述uav;以及显示所述第二图像数据,所述第二图像数据包括表示所述uav的视点的实时图像数据。38.根据权利要求36所述的非暂时性计算机可读存储介质,其中,所述指令在被执行时还使所述至少一个处理器:从所述紧凑有效载荷接收所述绘图数据的表示;以及显示所述绘图数据的表示,所述绘图数据的表示包括由所述扫描传感器捕捉的所述绘图数据的稀疏图表示。39.根据权利要求38所述的非暂时性计算机可读存储介质,其中,所述指令在被执行时还使所述至少一个处理器:在gps图上叠加所述绘图数据的表示。40.根据权利要求33所述的非暂时性计算机可读存储介质,其中,所述指令在被执行时还使所述至少一个处理器:将所述经地理参照的数据与从所述一个或多个相机中的第二相机获得的颜色数据关联。41.根据权利要求33所述的非暂时性计算机可读存储介质,其中,所述紧凑有效载荷经由适配器设备耦接至所述uav,所述适配器设备向所述紧凑有效载荷提供电力,并管理所述uav与所述紧凑有效载荷之间的命令和/或传感器数据的通信。42.根据权利要求33所述的非暂时性计算机可读存储介质,其中,所述扫描传感器包括光探测和测距lidar传感器。43.根据权利要求42所述的非暂时性计算机可读存储介质,其中,所述lidar传感器具有大约70度的视野。44.根据权利要求33所述的非暂时性计算机可读存储介质,其中,所述第一相机是包括机械快门的单目灰度相机。45.根据权利要求33所述的非暂时性计算机可读存储介质,其中,所述ins包括惯性测量单元imu传感器。46.根据权利要求33所述的非暂时性计算机可读存储介质,其中,所述指令在被执行时还使所述至少一个处理器:从所述可移除存储介质中获取所述特征数据和所述经地理参照的数据;以及
基于所述特征数据和所述经地理参照的数据生成至少一个局部图。47.根据权利要求33所述的非暂时性计算机可读存储介质,其中所述指令在被执行时还使所述至少一个处理器:对所述绘图数据进行下采样以生成稀疏点云,以用于在客户端装置上进行实时可视化。48.根据权利要求33所述的非暂时性计算机可读存储介质,其中,基于校准固有参数在所述扫描传感器、所述一个或多个相机以及所述惯性导航系统ins之间执行校准。
技术总结
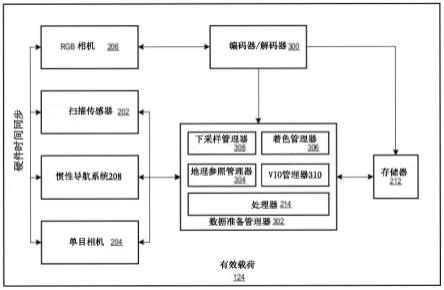
一种用于在可移动物体环境中进行绘图的方法。绘图方法可以包括从耦接至无人飞行器(UAV)(104)的紧凑有效载荷(124)的扫描传感器(202)获得(1302)绘图数据,该紧凑有效载荷(124)包括配置为使用参照时钟信号进行同步的扫描传感器(202)、一个或多个相机(204、206)以及惯性导航系统(INS)(208);从一个或多个相机(204、206)中的第一相机获得(1304)特征数据;从INS(208)获得(1306)定位数据;至少基于参照时钟信号将绘图数据与定位数据关联(1308),以生成经地理参照的数据;以及将经地理参照的数据和特征数据存储(1310)到可移除存储介质(216)。(216)。(216)。
技术研发人员:阿尔琼
受保护的技术使用者:深圳市大疆创新科技有限公司
技术研发日:2020.06.27
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。