1.本技术涉及交通运输的技术领域,尤其涉及一种风光浪联合发电智能甲板清洁机器人。
背景技术:
2.甲板是船舶的重要结构之一,是船舶结构中位于内底板以上的平面结构,用于封盖船内空间,并将其水平分隔成层。船舶在海上行驶时,海浪会冲击到船上,部分海水会残留在甲板上,如不及时进行清洗,海水中的盐会腐蚀甲板,破坏甲板的性能,造成不必要的损失。同时,由于船上人员在甲板上活动,行走过程中携带污物,并由于踩踏使污物附着在甲板上,当污物积累较多时会影响甲板的正常使用。所以,对船舶甲板进行及时有效的清洁尤为重要。随着航运业的发展,船舶数量在不断增长,规模在逐渐扩大,同时甲板的面积也逐步增大,仅靠人力清洁甲板费时费力且效率低,针对这一问题,人们研发出了甲板清洁机器,代替人力清洁,但当前较多研究成果为半自动清洁机器人,需要人为操纵才能完成作业,没有达到自动清洁的目标。于是本文所述发明甲板清洁机器人安装自动控制装置,可实现自动清洁。
3.现有部分船舶其甲板上设施较多,分布复杂。现有船舶甲板清洗设备结构复杂,体积较大,难以实现对甲板拐角处以及狭小区域的清洁,清洗效果差。
4.由于传统能源使用造成环境污染问题,以及传统能源的短缺,倡导使用绿色能源已成为人们的共识。海上的风能资源丰富,风力发电已成为世界上发展最快的清洁发电技术。同时太阳能资源也较为丰富,可用于发电。除此之外,船舶航行过程中会产生较强晃动,可设置发电箱,利用甲基硅油晃动时产生的波浪发电。风光浪互补发电,代替消耗传统能源供电,符合当前绿色低碳的要求。
技术实现要素:
5.有鉴于此,本技术提供一种风光浪联合发电智能甲板清洁机器人,能够现有装置在进行清洁时依赖蓄电池供电,无法长时间持续工作,且工作效率低的问题。
6.本技术提供一种风光浪联合发电智能甲板清洁机器人,包括用以执行甲板清洁的清洁装置和用以为所述清洁装置供电的风光浪互补发电装置,所述风光浪互补发电装置光伏发电组件、风力发电组件、波浪能发电组件、整流器、控制器和蓄电池,所述风力发电组件和波浪能发电组件均通过整流器与光伏发电组件并联连接到控制器,控制器连接蓄电池控制电量的储存和释放。
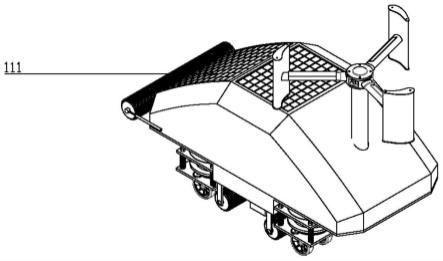
7.可选地,所述光伏发电组具有太阳能板,所述太阳能板分布在整车外壳前方和上方,且呈矩阵排布。
8.可选地,所述风力发电组件包括风轮叶片、导流板、连接轴、支撑杆和风力发电机,所述导流板包裹在连接轴上且呈59.5
°
开角。
9.可选地,所述波浪能发电组件包括浮子、水轮、限位盘、箱体、离合器(135)、齿轮
箱、波浪能发电机和连通管,所述离合器的输出轴并行接入齿轮箱,所述齿轮箱的输出轴安装波浪能发电机,所述限位盘固定水轮的轴向位置,所述箱体支撑水轮,所述箱体和连通管内容纳有甲基硅油介质。
10.可选地,所述清洁装置包括前方清洁机构、清洁剂喷射机构和下方清洁机构,所述前方清洁机构包括行位控制齿轮、行位控制齿轮承杆、弹性连接杆、清洁机构刷毛、微型旋转电机、可旋转长轴和控制电机,所述行位控制齿轮与控制电机输出齿轮啮合且固定在行位控制齿轮承杆上,所述弹性连接杆具有弹性且能够自由伸缩,所述可旋转长轴的外部安装有清洁机构刷毛,内部安装微型旋转电机。
11.可选地,所述清洁剂喷射机构包括清洁剂储存罐、高压水储存罐、机构固定螺栓孔、计量泵、高压连接细管、发泡机、预发射腔、高压泵、分液三通、清洁剂输送管路和可旋转喷头,所述清洁剂储存罐与高压水储存罐通过机构固定螺栓孔固定在底板上,且与计量泵相连,所述计量泵控制清洁剂与高压水的配比,所述高压连接细管连接计量泵与发泡机,所述发泡机控制清洁剂在预发射腔内发泡,所述高压泵连接预发射腔与分液三通,所述分液三通连接清洁剂输送管路与可旋转喷头。
12.可选地,所述下方清洁机构包括行位控制齿条、清洁机构刷毛、可旋转长轴、微型旋转电机、行位控制齿条连接杆、同步控制电机,所述行位控制齿条固定在行位控制齿条连接杆上,并与同步控制电机的输出齿轮啮合,所述清洁机构刷毛固定在可旋转长轴外部,所述微型旋转电机安装在可旋转长轴(233)内部。
13.可选地,还包括用以为清洁装置提供动力的驱动装置,所述驱动装置包括上承盘、减震弹簧、下承盘、编码器、编码器齿轮、紧固螺栓、差速器、转向电机、转向电机齿轮、转向齿轮、压紧盘、压紧盘螺栓、转向齿轮垫圈、直流调速器、驱动带轮、驱动电机、上承盘限位套筒、固定法兰孔、驱动电机固定板、车轮、轮毂轴承、驱动轴,所述上承盘冲有固定法兰孔与底板螺栓相连,所述上承盘与下承盘之间安装紧固螺栓与减震弹簧,所述上承盘限位套筒镶嵌在上承盘内部,所述驱动电机竖直固定在驱动电机固定板上,通过皮带连接驱动带轮,所述直流调速器安装在与驱动电机固定板连接的平面上,所述驱动带轮通过轴连接差速器,所述差速器通过齿轮驱动驱动轴,所述驱动轴通过轮毂轴承带动车轮旋转,所述压紧盘与下承盘通过压紧盘螺栓固定,与转向齿轮相接,所述转向齿轮垫圈安装在转向齿轮与下承盘之间,所述转向电机固定在下承盘的下表面,通过转向电机齿轮与转向齿轮啮合,所述编码器固定在下承盘的下表面,通过编码器齿轮与转向齿轮的啮合。
14.可选地,还包括用以安装清洁装置的底盘装置,所述底盘装置包括底板、电池包、连接法兰盘,所述电池包安装在底板底部,所述连接法兰盘与上承盘通过螺栓连接;
15.所述固定装置包括复位弹簧行位限制套、复位弹簧、电磁铁行位限制套、电磁铁,所述复位弹簧行位限制套焊接在底下表面,所述复位弹簧与电磁铁相连,所述电磁铁行位限制套与电磁铁周向距离为5mm。
16.可选地,还包括控制装置,控制装置包括中央控制器、高压水水位探测器、清洁剂水位探测器、激光雷达探测器、车载摄像头、电池包管理模块、激光雷达探测器,所述高压水水位探测器、清洁剂水位探测器安装在清洁剂储存罐和高压水储存罐内部,所述激光雷达探测器、车载摄像头、激光雷达探测器、车载摄像头安装在整车外面,所述中央控制器、电池包管理模块安装在底板上表面。
压紧盘;3112-压紧盘螺栓;3113-转向齿轮垫圈;3114-直流调速器;3115-驱动带轮;3116-驱动电机;3117-上承盘限位套筒;3118-固定法兰孔;3119-驱动电机固定板;3120-车轮(3120);3121-轮毂轴承;3122-驱动轴;
41.321-底板;322-电池包;323-连接法兰盘;
42.41-复位弹簧行位限制套;42-复位弹簧;43-电磁铁行位限制套;44-电磁铁;
43.s01-中央控制器;s02-高压水水位探测器;s03-清洁剂水位探测器;s04-激光雷达探测器;s05,s10-车载摄像头;s06-电池包管理模块;s07,s08,s09-激光雷达探测器。
具体实施方式
44.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
45.在本技术的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
46.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
47.下文的公开提供了许多不同的实施方式或例子用来实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本技术提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
48.本技术风光浪联合发电智能甲板清洁机器人包括风光浪互补发电装置、清洁装置、驱动装置、底盘装置、固定装置和控制装置。
49.风光浪互补发电装置包括光伏发电组件、风力发电组件、波浪能发电组件、整流器、控制器、蓄电池和逆变器。风力发电装置和波浪能发电装置均通过整流器与光伏发电装置并联连接到控制器,控制器连接蓄电池控制电量的储存和释放。
50.光伏发电组件置于机壳体上顶面及前侧面,使用太阳能板发电。太阳能板111分布在整车外壳前方和上方,且呈矩阵排布
51.风力发电组件采用垂直轴风力发电机发电。具体地,风力发电组件包括风轮叶片121、导流板122、连接轴123、支撑杆124和风力发电机125,所述导流板122包裹在连接轴123上且呈59.5
°
开角。
52.波浪能发电组件包括浮子131、水轮132、限位盘133、箱体134、离合器135、齿轮箱
136、波浪能发电机137和连通管138,所述离合器135的输出轴并行接入齿轮箱136,所述齿轮箱136的输出轴安装波浪能发电机137,所述限位盘133固定水轮132的轴向位置,所述箱体134支撑水轮132,所述箱体134和连通管138内容纳有甲基硅油介质。
53.所述水轮132由两排通向叶片组成,叶片采用机翼式且叶片的厚度从叶片根部向叶片边缘逐渐减小,且两个叶轮交错排布。
54.上述结构的波浪能发电组件,具体的工作原理是:采用甲基硅油作为介质,甲基硅油置于箱体134中,当机器人移动以及船体发生摇晃时箱体中的甲基硅油随之产生晃动,通过连通管138流通,推动水轮135的叶片转动,水轮132通过与之相连的轴传递转矩,水轮输出轴连接箱体134外的离合器135,多个离合器135并联接入齿轮箱135中,齿轮箱136与波浪能发电机137相连,叶轮轴的转矩通过此一系列装置传递至波浪能发电机137进行发电,同时箱体134底部装有多个浮子以共同发电。
55.清洁装置通过前方清洁机构、清洁剂喷射机构和下方清洁机构实现对船体甲板和货舱外壁的清洁工作。
56.前方清洁机构包括行位控制齿轮211、行位控制齿轮承杆212、弹性连接杆213、清洁机构刷毛214、微型旋转电机215、可旋转长轴216和控制电机217,所述行位控制齿轮211与控制电机217输出齿轮啮合且固定在行位控制齿轮承杆212上,所述弹性连接杆213具有弹性且能够自由伸缩,所述可旋转长轴216的外部安装有清洁机构刷毛214,内部安装微型旋转电机215。
57.上述前方清洁机构的工作原理为:行位控制齿轮211固定在行位控制齿轮承杆212上,通过控制电机217控制前方清洁机构升降完成舱壁清洁工作。弹性连接杆213可自动贴合舱壁并在设定舱壁距离内清洁舱壁。微型旋转电机215驱动清洁机构刷毛214旋转清洁舱壁。
58.所述清洁剂喷射机构22包括清洁剂储存罐2201、高压水储存罐2202、机构固定螺栓孔2203、计量泵2204、高压连接细管2205、发泡机2206、预发射腔2207、高压泵2208、分液三通2209、清洁剂输送管路2210和可旋转喷头2211,所述清洁剂储存罐2201与高压水储存罐2202通过机构固定螺栓孔2203固定在底板321上,且与计量泵2204相连,所述计量泵2204控制清洁剂与高压水的配比,所述高压连接细管2205连接计量泵2204与发泡机2206,所述发泡机2206控制清洁剂在预发射腔2207内发泡,所述高压泵2208连接预发射腔2207与分液三通2209,所述分液三通2209连接清洁剂输送管路2210与可旋转喷头2211。
59.上述清洁剂喷射机构的工作原理具体为:清洁剂储存罐2201与高压水储存罐2202通过计量泵2204控制两罐的流量,以保证清洁剂与高压水的正确配比。发泡机2206依靠电机驱动清洁剂在预发射腔2207内发泡,以达到良好的清洁效果。高压泵2208将预发射腔2207内已发泡的清洁剂通过分液三通、清洁剂输送管路2210输送到可旋转喷头2211。可旋转喷头2211可控制发泡后的清洁剂对整车前方区域进行清洁剂喷洒作业。
60.下方清洁机构23包括行位控制齿条231、清洁机构刷毛232、可旋转长轴233、微型旋转电机234、行位控制齿条连接杆235、同步控制电机236,所述行位控制齿条231固定在行位控制齿条连接杆235上,并与同步控制电机236的输出齿轮啮合,所述清洁机构刷毛232固定在可旋转长轴233外部,所述微型旋转电机234安装在可旋转长轴233内部。
61.下方清洁机构的工作原理是:行位控制齿条231固定在行位控制齿条连接杆235
上,并与同步控制电机236的输出齿轮啮合,控制下方清洁机构距地高度,在清洁作业时控制下方清洁机构下压与甲板相接触,提供一定的下压力保障清洁效果,在整车越障时控制下方清洁机构升起,防止与甲板产生碰撞。微型旋转电机234控制清洁机构刷毛232旋转清洁甲板。
62.驱动装置包括上承盘3101、减震弹簧3102、下承盘3103、编码器3104、编码器齿轮3105、紧固螺栓3106、差速器3107、转向电机3108、转向电机齿轮3109、转向齿轮3110、压紧盘3111、压紧盘螺栓3112、转向齿轮垫圈3113、直流调速器3114、驱动带轮3115、驱动电机3116、上承盘限位套筒3117、固定法兰孔3118、驱动电机固定板3119、车轮3120、轮毂轴承3121、驱动轴3122,所述上承盘3101冲有固定法兰孔3118与底板321螺栓相连,所述上承盘3101与下承盘3103之间安装紧固螺栓3106与减震弹簧3102,所述上承盘限位套筒3117镶嵌在上承盘3101内部,所述驱动电机3116竖直固定在驱动电机固定板3119上,通过皮带连接驱动带轮3115,所述直流调速器3114安装在与驱动电机固定板3119连接的平面上,所述驱动带轮3115通过轴连接差速器3107,所述差速器3107通过齿轮驱动驱动轴3122,所述驱动轴3122通过轮毂轴承3121带动车轮3120旋转,所述压紧盘3111与下承盘3103通过压紧盘螺栓3112固定,与转向齿轮(3110)相接,所述转向齿轮垫圈(3113)安装在转向齿轮(3110)与下承盘3103之间,所述转向电机3108固定在下承盘3103的下表面,通过转向电机齿轮3109与转向齿轮3110啮合,所述编码器3104固定在下承盘3103的下表面,通过编码器齿轮3105与转向齿轮3110的啮合。
63.前文所提及的驱动装置的工作原理是:驱动装置用以驱动甲板清洁机器人行进,完成清洁作业。驱动装置中上承盘3101与下承盘3102之间通过紧固螺栓3106与减震弹簧3102相连为整车提供减震,且在上承盘限位套筒3117的约束下保持上承盘3101的位置不发生横向偏移。驱动电机3116在直流调速器3114的控制下,通过皮带驱动驱动带轮3115转动,驱动带轮3115通过轴带动差速器3107。差速器3107输出动力到驱动轴3122,保证整车圆周旋转且减少整车的转弯阻力。驱动轴3122通过轮毂轴承3121带动车轮3120旋转,保障车辆前进。压紧盘3111通过压紧盘螺栓3112固定了下承盘3101的位置,并和下承盘3101上方的转向齿轮垫圈3113一起固定转向齿轮3110的轴向位置。转向电机3108通过转向电机齿轮3109与转向齿轮3110啮合,推动转向齿轮3110转动,进而推动整车旋转。编码器3104通过编码器齿轮3105与转向齿轮3110的啮合,记录车轮的坐标和位移,经中央控制器处理得到车轮的转向角度,位移参数。
64.底盘装置包括底板321、电池包322、连接法兰盘333,所述电池包322安装在底板321底部,所述连接法兰盘333与上承盘3101通过螺栓连接。
65.以此,底盘装置中电池包322用来储存发电装置产生的电能,同时供给驱动装置使用。底板321为整车提供支撑。
66.固定装置包括复位弹簧行位限制套41、复位弹簧42、电磁铁行位限制套43、电磁铁44,所述复位弹簧行位限制套41焊接在底板321下表面,所述复位弹簧42与电磁铁44相连,所述电磁铁行位限制套43与电磁铁44周向距离为5mm。
67.以此,当遇到恶劣天气影响致使甲板清洁机器人无法工作或甲板清洁机器人停工充电时开始工作。复位弹簧行位限制套41限制复位弹簧42的空间位置,复位弹簧42在不工作时控制电磁铁44停留在电磁铁行位限制套41中。电磁铁44通电工作时与甲板吸附,固定
甲板清洁机器人在甲板上,保障甲板清洁机器人空间位置的稳定,电磁铁44断电时,受复位弹簧42的拉力和电磁铁行位限制套43的限制,固定在电磁铁行位限制套43中,在甲板清洁机器人工作时不产生晃动。
68.控制装置包括中央控制器s01、高压水水位探测器s02、清洁剂水位探测器s03、激光雷达探测器s04、车载摄像头s05,s10、电池包管理模块s06、激光雷达探测器s07,s08,s09,所述高压水水位探测器s02、清洁剂水位探测器s03安装在清洁剂储存罐2201和高压水储存罐2202内部,所述激光雷达探测器s04、车载摄像头s05,s10、激光雷达探测器s07,s08,s09安装在整车外面,所述中央控制器s01、电池包管理模块s06安装在底板321上表面。
69.上述控制装置的工作原理为:高压水水位探测器s01与清洁剂水位探测器s02分别监控高压水储存罐2201和清洁剂储存罐中2202液体的水位,并将数据传输给中央控制器s01。中央控制器s01针对高压水和清洁剂的储量进行决策,在高压水和清洁剂储量不足以完成清洁作业时,中央控制器s01对整车下达返航加注高压水和清洁剂的指令。环车周围的激光雷达探测器s07,s08,s09实时采集车辆周围位置信息,通过中央控制器的算法处理在控制终端显示车辆的实时位置。同时,中央控制器根据编码器s01和激光雷达探测器s07,s08,s09的数据,可在控制终端中显示车辆的运行轨迹,并通过算法进行机器人清洁路径规划,使机器人精准实施清洁作业,同时确保机器人处于甲板的安全位置。同时中央控制器s01对激光雷达探测器s07,s08,s09的数据处理,可以判断前方是否需要清洁舱壁,同时控制前方清洁机构展开工作。车载摄像头s05,s10对甲板进行实时扫描,将图像传递给中央控制器s01,中央控制器s01利用算法进行处理后,可判断是否需要越障,同时控制同步控制电机提升下方清洁机构,避免发生下方清洁机构与甲板发生碰撞。中央控制器s01对车载摄像头s05,s10和车载摄像头s05,s10输入的图像进行分析,可在控制终端中标记甲板锈蚀位置,以便工作人员高效及时展开补漆作业。电池包管理模块s06实时监控电池包的状态,输出电池电量和警报信息到控制终端。
70.本技术风光浪联合发电智能甲板清洁机器人的优势可概括为:
71.i)具备实时运动的控制装置,可识别甲板上的污渍,计算行驶路线,控制清洁装置实现自动清洁,提高了清洁效率;
72.ii)采用风光浪互补式发电装置对甲板清洁机器人供电,机器人在进行清洁工作耗能的同时可实现电量的补充,保证长时间稳定工作,且采用清洁能源,使用过程无污染;
73.iii)采用舵机驱动装置可实现整车圆周旋转,提高了灵活性,在狭小的区域可实现自由活动,控制装置可控制下方清洁装置的距地高度,在跨越障碍物时可实现避碰;
74.iiii)可检测甲板脱漆区域,并在移动终端上进行标记,提醒相关工作人员及时补漆;
75.ⅴ
)具有固定装置,固定装置中复位弹簧与电磁铁相连,电磁铁通电工作时与甲板吸附,固定甲板清洁机器人,保障甲板清洁机器人空间位置的稳定。
76.以上所述,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。