1.本发明属于光机装调领域,具体涉及一种吊舱舱段多自由度装调设备及装调方法。
背景技术:
2.随着光机技术的蓬勃发展,设备精度要求越来越高,因此对吊舱的装调提出了更高的要求;中小型吊舱由于体积相对小,在装调过程中的定位安装容易达到要求;但是对于大型吊舱而言,由于自身体积和重量的特殊性,使得装调过程中复杂且效率低。
3.例如某型吊舱舱段重量接近于100kg,装配过程中依赖人力搬运,效率低下且不安全,无法在满足装调精度的同时保证生产效率。
技术实现要素:
4.要解决的技术问题:
5.为了避免现有技术的不足之处,本发明提供一种吊舱舱段多自由度装调设备及装调方法,通过两个回转机构的空间配合,实现了吊舱的多自由度翻转及光机装调定位。
6.本发明的技术方案是:一种吊舱舱段多自由度装调设备,包括支撑底座、升降机构、承重梁、第一回转机构、第二回转机构;所述支撑底座位于设备底部,用于支撑其他部件;
7.所述承重梁通过升降机构安装于支撑底座上方,并通过第一回转机构与升降机构转动连接,能够绕其自身中心轴转动;
8.所述吊舱舱段通过第二回转机构安装于承重梁的侧壁,能够绕其第二回转机构的中心轴转动;第二回转机构的轴向垂直于承重梁的中心轴。
9.本发明的进一步技术方案是:所述承重梁水平安装于支撑底座上方,其两端分别通过第一回转机构与升降机构连接,并能够绕轴360
°
旋转。
10.本发明的进一步技术方案是:所述第一回转机构包括驱动端和随动端,分别安装于承重梁的两端,由驱动端驱动承重梁绕轴旋转,随动端作为承重梁转动及支撑的连接件。
11.本发明的进一步技术方案是:两个所述第二回转机构对称安装于承重梁的两侧,分别通过舱段固定机构与吊舱舱段固定连接,能够控制两个吊舱舱段绕第二回转机构的中心轴360
°
旋转。
12.本发明的进一步技术方案是:所述支撑底座的底部安装有能够锁紧的滚轮,能够实现设备的移动或位置固定。
13.本发明的进一步技术方案是:所述升降机构的竖直方向高度能够调节,通过调节升降高度调节承重梁的高度位置,进而调整吊舱舱段不同姿态下的高度;且具有掉电自锁功能。
14.一种吊舱舱段多自由度装调设备的装调方法,具体步骤如下:
15.步骤1:由第一回转机构驱动承重梁旋转,旋转至两个第二回转机构分别位于承重
梁的上、下端;
16.步骤2:将吊舱舱段安装于舱段固定机构上;
17.步骤3:由第一回转机构驱动承重梁旋转,旋转至两个第二回转机构分别位于承重梁的水平两侧;
18.步骤4:由两个第二回转机构驱动吊舱舱段旋转,将吊舱舱段旋转至上端朝上;
19.步骤5:调整升降机构,将舱段上端面距离地面高度调整至800mm,进行吊舱舱段上端装配;
20.步骤6:由两个第二回转机构驱动吊舱舱段旋转,将吊舱舱段旋转至下端朝上;
21.步骤7:调整升降机构,将舱段下端面距离地面高度调整至800mm,进行吊舱舱段下端装配;
22.步骤8:由两个第二回转机构驱动吊舱舱段旋转,将吊舱舱段旋转至水平状态;
23.步骤9:调整升降机构,将吊舱舱段中心距离地面高度调整至800mm,进行吊舱舱段布线及组件装配;
24.步骤10:装配完成后,将吊舱舱段拆下。
25.本发明的进一步技术方案是:所述步骤5中,调整升降机构时,缓慢上升或者下降吊舱舱段上端面,上升或者下降过程中注意观吊舱察舱段与地面的距离,避免磕碰,利用米尺测量上端面距离地面的高度,当高度达到800mm时,停止升降机构并锁死。
26.本发明的进一步技术方案是:所述步骤7中,调整升降机构时,缓慢上升或者下降舱段下端面,上升或者下降过程中注意观察吊舱舱段与地面的距离,避免磕碰,利用米尺测量下端面距离地面的高度,当高度达到800mm时,停止升降机构并锁死。
27.本发明的进一步技术方案是:所述步骤中,调整升降机构时,缓慢上升或者下降舱段中心,上升或者下降过程中注意观察舱段与地面的距离,避免磕碰,利用米尺测量舱段中心距离地面的高度,当高度达到800mm时,停止升降机构并锁死。
28.有益效果
29.本发明的有益效果在于:本发明一种吊舱舱段多自由度装调设备及装调方法,通过两个回转机构的空间交叉安装,可以实现一次进行两个吊舱舱段装配,具有解放人力,提高生产效率的优点。
30.1)本发明可一次同时进行两个吊舱舱段装配,提高生产效率,且保证了安装精度。
31.2)本发明解放人力,保障装配人员安全。
附图说明
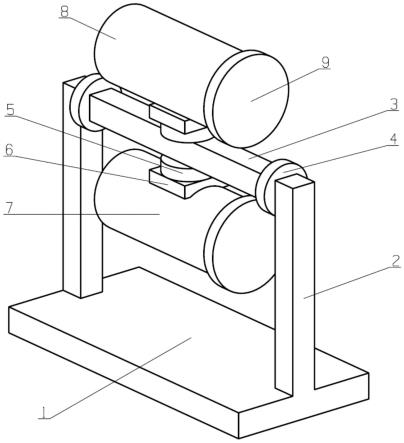
32.图1为本发明的装调设备的示意图。
33.附图标记说明:1是支撑底座,2是升降机构,3是承重梁,4是第一回转机构,5是第二回转机构,6是舱段固定机构,7是吊舱舱段,8是吊舱舱段上端,9是吊舱舱段下端。
具体实施方式
34.下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
35.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
36.参照图1所示,本实施例一种吊舱舱段多自由度装调设备,包括支撑底座1、升降机构2、承重梁3、第一回转机构4、第二回转机构5、舱段固定机构6;所述支撑底座1用于支撑整个设备;所述支撑底座1底部有可锁紧的滚轮,保证设备可移动可牢固固定;所述升降机构2用于调整吊舱舱段8不同姿态下的高度;所述承重梁用于设备承重,通过第一回转机构4与升降机构2转动连接;所述第一回转机构4能够调整吊舱舱段8绕承重梁3的轴向360
°
转动;所述第二回转机构5安装于承重梁3的侧壁,吊舱舱段8通过舱段固定机构6安装于第二回转机构上;所述第二回转机构用于调整吊舱舱段8绕第二回转机构的轴向360
°
转动。
37.所述吊舱舱段多自由度装调设备的装调方法包括以下步骤:
38.1)旋转第一回转机构,将两个第二回转机构调整至分别位于承重梁上下端;
39.2)将吊舱舱段安装至舱段固定机构;
40.3)旋转第一回转机构,将两个第二回转机构调整至分别位于承重梁左右端;
41.4)旋转两个第二回转机构,将吊舱舱段旋转至上端朝上;
42.5)调整升降机构,将舱段上端面距离地面高度调整至800mm左右,进行吊舱舱段上端装配;调整所述升降机构,缓慢上升或者下降舱段上端面,上升或者下降过程中注意观察舱段与地面的距离,避免磕碰,利用米尺测量上端面距离地面的高度,当高度达到800mm时,停止升降机构并锁死。
43.6)旋转两个第二回转机构,将吊舱舱段旋转至下端朝上;
44.7)调整升降机构,将舱段下端面距离地面高度调整至800mm左右,进行吊舱舱段下端装配;调整所述升降机构,缓慢上升或者下降舱段下端面,上升或者下降过程中注意观察舱段与地面的距离,避免磕碰,利用米尺测量下端面距离地面的高度,当高度达到800mm时,停止升降机构并锁死。
45.8)旋转两个第二回转机构,将吊舱舱段旋转至水平状态;
46.9)调整升降机构,将舱段中心距离地面高度调整至800mm左右,进行吊舱舱段布线及组件装配;调整所述升降机构,缓慢上升或者下降舱段中心,上升或者下降过程中注意观察舱段与地面的距离,避免磕碰,利用米尺测量舱段中心距离地面的高度,当高度达到800mm时,停止升降机构并锁死。
47.10)装配完成后,将吊舱舱段拆下。
48.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。