技术特征:
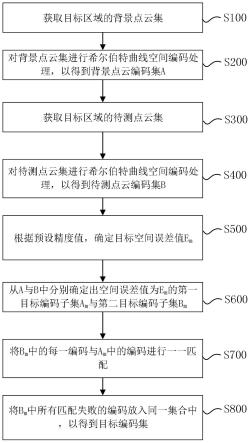
1.一种基于希尔伯特曲线编码的检测目标获取方法,其特征在于,所述方法包括如下步骤:获取目标区域的背景点云集,所述背景点云集包括背景中的固定目标的点云子集及至少一个可移动目标的位置点云集,所述位置点云集包括至少一个位置点云子集;所述位置点云子集为对应的可移动目标在预设移动路径中的任一位置时对应的点云集;对所述背景点云集进行希尔伯特曲线空间编码处理,以得到背景点云编码集a=(a1,a2,
…
,a
i
,
…
,a
n
),其中,a
i
为第i阶希尔伯特曲线对所述目标区域进行分割后,得到的背景点云对应的背景编码子集;i=1,2,
…
,n,n为背景编码子集的总数量;获取目标区域的待测点云集,所述待测点云集中包括所述背景点云集及待识别目标点云集,所述待识别目标点云集包括至少一个待识别目标对应的目标点云子集;对所述待测点云集进行希尔伯特曲线空间编码处理,以得到待测点云编码集b=(b1,b2,
…
,b
i
,
…
,b
n
);其中,b
i
为第i阶希尔伯特曲线对所述目标区域进行分割后,得到的待测点云对应的实时编码子集;根据预设精度值c1,确定目标空间误差值e
m
;其中,e
m
<c1,且c
1-e
m
≤y1;y1为第一阈值;e
m
为第m阶希尔伯特曲线对所述目标区域进行分割后,任一两个相邻的希尔伯特曲线上构造点之间的距离;m∈[1,n];从a与b中分别确定出空间误差值为e
m
的第一目标编码子集a
m
与第二目标编码子集b
m
;将b
m
中的每一编码与a
m
中的编码进行一一匹配;当b
m
中的任一编码与a
m
中的所有编码均不相同时,则编码匹配失败;将b
m
中所有匹配失败的编码放入同一集合中,以得到目标编码集。2.根据权利要求1所述的方法,其特征在于,应用于第一系统,所述第一系统包括第一缓存空间及第二缓冲空间,所述第一缓冲空间与所述第二缓冲空间相互独立设置;所述第一缓存空间用于对所述背景点云集进行希尔伯特曲线空间编码处理,并存储所述背景点云编码集a;所述第二缓存空间用于对实时获得的所述待测点云集进行希尔伯特曲线空间编码处理,并存储所述待测点云编码集b。3.根据权利要求1所述的方法,其特征在于,根据预设精度值c1,确定目标空间误差值e
m
,包括:获取每一阶希尔伯特曲线对所述目标区域进行分割后对应的空间误差值d1,d2,
…
,d
i
,
…
,d
n
,其中,d
i
为第i阶希尔伯特曲线对所述目标区域进行分割后对应的空间误差值;每当d
i
≤c1时,确定d
i
为初始目标空间误差值;从所有的所述初始目标空间误差值d
c1
,d
c2
,
…
,d
cv
,
…
,d
cu
中,确定目标空间误差值e
m
,e
m
满足如下条件:e
m
=max(d
c1
,d
c2
,
…
,d
cv
,
…
,d
cu
);其中,max()为最大值函数;d
cv
为第v个初始目标空间误差值;u为初始目标空间误差值的总数量;v=1,2,
…
,u,u≤n。4.根据权利要求3所述的方法,其特征在于,d
i
满足如下条件:
其中,x
i1
、y
i1
及z
i1
为第i阶希尔伯特曲线对所述目标区域进行分割后对应的目标构造点的空间坐标的坐标值;x
i2
、y
i2
及z
i2
为第i阶希尔伯特曲线上与所述目标构造点相邻的任一点的空间坐标的坐标值;所述目标构造点为第i阶希尔伯特曲线上的任一构造点。5.根据权利要求3所述的方法,其特征在于,获取每一阶希尔伯特曲线对所述目标区域进行分割后对应的空间误差值,包括:建立所述目标区域的希尔伯特分割阶数与对应的空间误差值的映射关系表;根据所述映射关系表及希尔伯特分割阶数,确定每一阶希尔伯特曲线对所述目标区域进行分割后对应的空间误差值。6.根据权利要求1所述的方法,其特征在于,在得到目标编码集之后,所述方法还包括:获取所述目标编码集中每一编码对应的空间坐标e1,e2,
…
,e
b
,
…
,e
q
,其中,e
b
为目标编码集中的第b个编码对应的空间坐标;b=1,2,
…
,q,q为目标编码集中的编码的总数量;对e1,e2,
…
,e
b
,
…
,e
q
进行点云分割处理,以生成多个分形云团;每一所述分形云团由多个空间坐标对应的点构成;从多个所述分形云团中确定出目标分形云团;所述目标分形云团中的对应的空间坐标的数量大于第二阈值。7.根据权利要求1所述的方法,其特征在于,获取目标区域的背景点云集,包括:确定多个目标时间点;获取所述目标区域在每一目标时间点时的背景点云数据帧;所述背景点云数据帧为在所述目标时间点时,所述背景中的固定目标及可移动目标的位置点云集;根据多个所述背景点云数据帧,生成所述目标区域的背景点云集。8.根据权利要求7所述的方法,其特征在于,通过激光雷达获取所述目标区域在每一目标时间点时的背景点云数据帧。9.一种非瞬时性计算机可读存储介质,所述非瞬时性计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至8任一项所述的一种基于希尔伯特曲线编码的检测目标获取方法。10.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至8任一项所述的一种基于希尔伯特曲线编码的检测目标获取方法。
技术总结
本发明公开了一种基于希尔伯特曲线编码的检测目标获取方法、介质及设备。包括如下步骤:对背景点云集进行希尔伯特曲线空间编码处理,以得到背景点云编码集A。对待测点云集进行希尔伯特曲线空间编码处理,以得到待测点云编码集B。根据预设精度值c1,确定目标空间误差值E
技术研发人员:何东林 王鹏 陈亚超 邓胜吉
受保护的技术使用者:中国民用航空总局第二研究所
技术研发日:2022.11.08
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。