1.本发明涉及计算机视觉技术领域,尤其涉及一种基于深度学习的无人机目标识别方法。
背景技术:
2.目标检测是计算机视觉领域的最重要的应用之一,已被广泛应用到了行人检测、疾病诊断、交通追踪及遥感图像目标检测等领域。近年来,由于无人机获取图像的便捷性和多角度特性,利用无人机拍摄的图像,对感兴趣目标进行检测,用于城市及交通管理,已经成为智慧城市建设的重要内容。
3.对无人机从高空获取的图像进行目标检测存在以下特点:1)尺度变化大,由于视角视距的不同,同一类物体的变化可能存在非常大的差距。2)长宽比不平衡,由于是从高空俯视进行观测,一些待检测物体的长宽比非常大,即从图像上观察是很狭长的目标。3)目标密集分布,城市中的人流量和车流量较大,拍摄的图像中含有较多的待检测目标,所以目标检测方法进行检测后获得数据。
4.但现有的基于深度学习的目标检测方法通常网络模型较为复杂,对于资源要求较高,对实时性要求很高的无人机图像目标检测不理想。
技术实现要素:
5.本发明的目的在于提供一种基于深度学习的无人机目标识别方法,旨在解决现有的基于深度学习的目标检测方法对实时性要求很高的无人机图像目标检测不理想的问题。
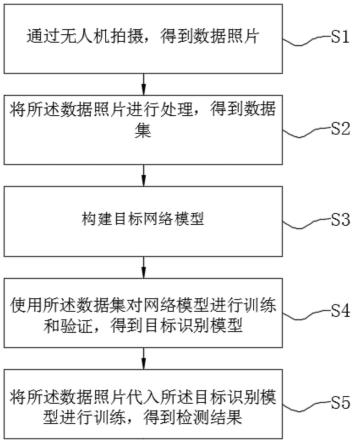
6.为实现上述目的,本发明提供了一种基于深度学习的无人机目标识别方法,包括以下步骤:
7.通过无人机拍摄,得到数据照片;
8.将所述数据照片进行处理,得到数据集;
9.构建目标网络模型;
10.使用所述数据集对网络模型进行训练和验证,得到目标识别模型;
11.将所述数据照片代入所述目标识别模型进行训练,得到检测结果。
12.其中,所述将所述数据照片进行处理,包括:
13.对所述数据照片进行图像裁剪、缩放、翻转、移位、旋转、亮度和加噪声或去噪声调整,增强图片数据,得到数据集。
14.其中,所述使用所述数据集对网络模型进行训练和验证,得到目标识别模型,包括:
15.将所述数据集分为训练集和验证集;
16.将所述训练集代入网络模型进行训练,得到预训练模型;
17.将所述验证集代入所述预训练模型进行验证寻优,得到目标检测模型。
18.其中,所述将所述训练集代入网络模型进行训练,得到预训练模型,包括:
19.对所述训练集进行特征提取,得到特征图;
20.将所述特征图代入特征融合模型,得到融合特征图;
21.将所述融合特征图代入网络模型进行训练,得到预训练模型。
22.其中,所述对所述训练集进行特征提取,得到特征图,包括:
23.采用卷积网络对所述训练集进行特征提取,得到特征图。
24.其中,所述将所述融合特征图代入网络模型进行训练,得到预训练模型,包括:
25.所述目标网络模型将所述融合特征图分成多个网格;
26.通过每个网格检测中心点落在所述网格内的目标;
27.采用非极大值抑制,首先从所有的所述融合特征图检测框中找到置信度最大的那个框,然后挨个计算其与剩余框的iou,如果iou大于一定阈值,那么就将该框剔除;然后对剩余的检测框重复上述过程,直到处理完所有的检测框,得到预训练模型。
28.其中,所述将所述验证集代入所述预训练模型进行验证寻优,得到目标检测模型,包括:
29.对所述验证集进行特征提取,得到第二特征图;
30.将所述第二特征图代入所述预训练模型进行验证寻优,采用非极大值抑制保留最优检测框,得到验证结果。
31.本发明的一种基于深度学习的无人机目标识别方法,通过无人机拍摄,得到数据照片;将所述数据照片进行处理,得到数据集;构建目标网络模型;使用所述数据集对网络模型进行训练和验证,得到目标识别模型;将所述数据照片代入所述目标识别模型进行训练,得到检测结果,本发明的目的在于提供一种基于深度学习的无人机目标识别方法,旨在解决现有的基于深度学习的目标检测方法对实时性要求很高的无人机图像目标检测不理想的问题。
附图说明
32.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
33.图1是本发明提供的一种基于深度学习的无人机目标识别方法的流程图。
34.图2是使用所述数据集对网络模型进行训练和验证,得到目标识别模型的流程图。
35.图3是将所述验证集代入所述预训练模型进行验证寻优,得到目标检测模型的流程图。
具体实施方式
36.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
37.请参阅图1,本发明提供一种基于深度学习的无人机目标识别方法,包括以下步骤:
38.s1通过无人机拍摄,得到数据照片;
39.具体的,无人机携带摄像头进行航拍,通过无线通讯模块将拍摄的发送出来,得到数据照片。
40.s2将所述数据照片进行处理,得到数据集;
41.具体的,对所述数据照片进行图像裁剪、缩放、翻转、移位、旋转、亮度和加噪声或去噪声调整,增强图片数据,得到数据集。
42.s3构建目标网络模型;
43.具体的,采用yolo算法构件一个网络模型。
44.s4使用所述数据集对网络模型进行训练和验证,得到目标识别模型;
45.s41将所述数据集分为训练集和验证集;
46.具体的,将所述数据集分为两份,一份为数据集,一份为验证集,按数据集:验证集=8:2进行划分。
47.s42将所述训练集代入网络模型进行训练,得到预训练模型;
48.具体的,
49.对所述训练集进行特征提取,
50.采用卷积网络来提取特征,
51.使用cnn作为分类器对训练集提取特征,所述cnn为卷积神经网,通过cnn进行全卷积,然后由cnn全连接层,得到特征图;
52.使用cnn使图片的空间位置信息的不变性,卷积过程中图片大小减少,但是位置对应关系还是保存的。
53.将所述特征图代入特征融合模型,得到融合特征图;
54.所述将所述融合特征图代入网络模型进行训练,得到预训练模型;
55.所述网络模型将所述融合特征图分成多个网格;
56.通过每个网格检测中心点落在所述网格内的目标;
57.具体的,采用非极大值抑制,首先从所有的所述融合特征图检测框中找到置信度最大的那个框,然后挨个计算其与剩余框的iou,如果iou大于一定阈值,那么就将该框剔除;然后对剩余的检测框重复上述过程,直到处理完所有的检测框,得到预训练模型。
58.s43将所述验证集代入所述预训练模型进行验证寻优,得到目标检测模型;
59.具体方式为:
60.s431将所述验证集进行特征提取,得到第二特征图;
61.s432将所述第二特征图代入目标检测模型,采用非极大值抑制保留最优检测框,得到目标检测模型。
62.s5将所述数据照片代入所述目标识别模型进行训练,得到检测结果;
63.具体的,将所述数据照片代入所述目标识别模型进行训练,检测出图片上出现的物体,如人、动物和建筑等,得到检测结果。
64.以上所揭露的仅为本发明一种基于深度学习的无人机目标识别方法较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。