1.本发明涉及图像处理技术,尤其涉及一种基于梯度对称性的微图码运动模糊检测方法。
背景技术:
2.近些年来随着国内生产的飞速发展,假货问题越来越猖獗,开始危及企业和消费者的合法权益,严重影响国家的经济发展。随着智能设备的使用普及,图像防伪技术使用越来越普及。一种新型微图码被设计提出,微图码是由二维码 微图防伪码结合而成的具有售前防伪、产品溯源、防止窜货与智慧营销等功能,其中微图防伪码是特殊设计的密集点阵图案,在印刷中更利于油墨的随机扩散。微图防伪技术,通过手机拍出清晰稳定的图像和服务器模板图像对比,在细微处比较油墨的扩散效果。
3.在实际应用过程中,由于智能手机使用过程中难免会出现抖动,这种抖动会影响最终拍摄出图片出现拖影,质量不佳,影响到微图防伪的最终结果,可能导致正品变成赝品,这是市场所不能容忍的。基于这种背景,提出一种基于梯度对称性的微图码运动模糊检测方法,在检测到图像为运动模糊图像时,判定此次结果不可靠,让用户重新去拍照验证。
技术实现要素:
4.本发明要解决的技术问题在于针对现有技术中的缺陷,提供一种基于梯度对称性的微图码运动模糊检测方法。
5.本发明解决其技术问题所采用的技术方案是:一种基于梯度对称性的微图码运动模糊检测方法,包括以下步骤:步骤1)拍照获取微图码样本图片;微图码包括二维码区和防伪区;所述防伪区包括微图防伪码,其中微图防伪码为密集点阵组成的图案;步骤2)定位扣取微图防伪码的区域图像作为目标图像;步骤3)计算目标图像区0
°
,90
°
,45
°
,135
°
的梯度图像;步骤4) 根据梯度图像,计算出0
°
和90
°
梯度图像对称性,45
°
和135
°
梯度图像对称性,根据对称性判断图像是否运动模糊。
6.按上述方案,所述步骤2)中定位扣取微图防伪码的区域图像,具体如下:通过对微图码样本图片的防伪区图案进行平滑滤波和二值化处理后,寻找轮廓,筛选轮廓中符合正方形的矩形作为目标轮廓,提取轮廓,利用图像仿射变换,提取出目标图像。
7.按上述方案,步骤3)中,采用目标图像与4个方向的sobel算子进行卷积运算,得到4个方向的梯度图像。
8.按上述方案,所述步骤4)中,判断过程具体如下:求出四幅图像的灰度均值,计算0
°
和90
°
方向梯度均值与比值45
°
和135
°
方向梯度均值比值,当比值之和超过阈值时,则判断为模糊图像;具体公式如下:
其中,为图像与水平sobel算子卷积后的图像平均灰度值,为图像与垂直sobel算子卷积后的图像平均灰度值,为图像与45
°
方向sobel算子卷积后的图像平均灰度值,为图像与135
°
方向sobel算子卷积后的图像平均灰度值;为两个比值的比例系数,表示差异阈值。
9.本发明产生的有益效果是:使用本发明方法当图像出现运动模糊时,能有效准确的检验出来,减少因运动模糊导致的正品变赝品现象,提升防伪检验算法的稳定性,大大提升鉴别的鲁棒性。
附图说明
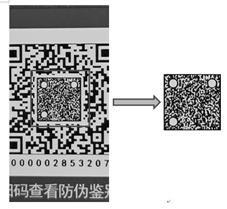
10.下面将结合附图及实施例对本发明作进一步说明,附图中:图1是本发明实施例的方法流程图;图2是本发明实施例的防伪码定位提取目标图像示意图;图3是本发明实施例的四方向边缘特征提取;图4是本发明实施例的样本特征数据分布图。
具体实施方式
11.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
12.如图1所示,本发明提供的一种基于梯度对称性的微图码运动模糊检测方法,包括以下步骤:步骤1:移动端设备拍照获取微图码样本图片;步骤2:定位扣取微图码防伪区域图像,并校正归一化;步骤3:计算出防伪码0
°
,90
°
,45
°
,135
°
梯度图像;步骤4:根据梯度图像,计算出横竖向梯度对称性,45度和135度梯度图像对称性,根据对称性判断图像是否运动模糊。
13.请见图2,微图码防伪区为目标区域。微图码是由二维码 微图防伪码结合而成的具有售前防伪、产品溯源、防止窜货与智慧营销等功能,其中微图防伪码是特殊设计的密集点阵图案,在印刷中更利于油墨的随机扩散,防伪码图像具有灰度分布两级化的特征,本实施例中微图防伪码还设计有3个用于定位的白色圆圈。
14.微图防伪码分布随机,整体分布均匀,不具有方向性。通过对防伪码图片进行平滑滤波,二值化,寻找轮廓,筛选轮廓中符合正方形的矩形,判断正方形轮廓中是否存在三个白色圆圈,存在则为目标轮廓,提取轮廓,利用图像仿射变换,提取出目标图像。
15.步骤3:如图3,用防伪码图像与0
°
,90
°
,45
°
,135
°
四个方向的sobel算子进行卷积运算,得到4个方向的梯度图像。
16.如图4所示,在步骤4:求出四幅图像的灰度均值,横向竖向梯度均值比值45
°
和135
°
方向梯度均值比值,当比值之和超过阈值时,则认为为模糊图像。具体公式见公式1:
ꢀꢀꢀꢀꢀꢀꢀ
(公式1)其中,为图像与水平sobel算子卷积后的图像平均灰度值, 为图像与垂直sobel算子卷积后的图像平均灰度值,为图像与45
°
方向sobel算子卷积后的图像平均灰度值,为图像与135
ꢀ°
方向sobel算子卷积后的图像平均灰度值。为两个比值的比例系数,表示差异阈值。其中参数值通过模糊数据和正常数据分布,运用svm二分类,拟合出分类线,确定的值。上式默认为,实际若则取,对角方向和同理。为了方便数据管理且并不影响检测结果,认为当两个比值之和满足上述条件时,即认为存在动态模糊。
17.使用本发明方法当图像出现运动模糊时,能有效准确的检验出来,减少因运动模糊导致的正品变赝品现象,提升防伪检验算法的稳定性,大大提升鉴别的鲁棒性。
18.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
技术特征:
1.一种基于梯度对称性的微图码运动模糊检测方法,其特征在于,包括以下步骤:步骤1)拍照获取微图码样本图片;微图码包括二维码区和防伪区;所述防伪区包括微图防伪码,其中微图防伪码为密集点阵组成的图案;步骤2)定位扣取微图防伪码的区域图像作为目标图像;步骤3)计算目标图像区0
°
,90
°
,45
°
,135
°
的梯度图像;步骤4) 根据梯度图像,计算出0
°
和90
°
梯度图像对称性,45
°
和135
°
梯度图像对称性,根据对称性判断图像是否运动模糊。2.根据权利要求1所述的基于梯度对称性的微图码运动模糊检测方法,其特征在于,所述步骤2)中定位扣取微图防伪码的区域图像,具体如下:通过对微图码样本图片的防伪区图案进行平滑滤波和二值化处理后,寻找轮廓,筛选轮廓中符合正方形的矩形作为目标轮廓,提取轮廓,利用图像仿射变换,提取出目标图像。3.根据权利要求1所述的基于梯度对称性的微图码运动模糊检测方法,其特征在于,步骤3)中,采用目标图像与4个方向的sobel算子进行卷积运算,得到4个方向的梯度图像。4.根据权利要求1所述的基于梯度对称性的微图码运动模糊检测方法,其特征在于,所述步骤4)中,判断过程具体如下:求出四幅图像的灰度均值,计算0
°
和90
°
方向梯度均值与比值45
°
和135
°
方向梯度均值比值,当比值之和超过阈值时,则判断为模糊图像;具体公式如下:其中,为图像与水平sobel算子卷积后的图像平均灰度值, 为图像与垂直sobel算子卷积后的图像平均灰度值,为图像与45
°
方向sobel算子卷积后的图像平均灰度值,为图像与135
ꢀ°
方向sobel算子卷积后的图像平均灰度值;为两个比值的比例系数,表示差异阈值。
技术总结
本发明公开了一种基于梯度对称性的微图码运动模糊检测方法,该方法包括以下步骤:步骤1)拍照获取微图码样本图片;微图码包括二维码区和防伪区;所述防伪区包括微图防伪码,其中微图防伪码为密集点阵组成的图案;步骤2)定位扣取微图防伪码的区域图像作为目标图像;步骤3)计算目标图像区0
技术研发人员:张耀 马风新 宋育锋
受保护的技术使用者:武汉保诚信科技有限公司
技术研发日:2022.11.18
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。