技术特征:
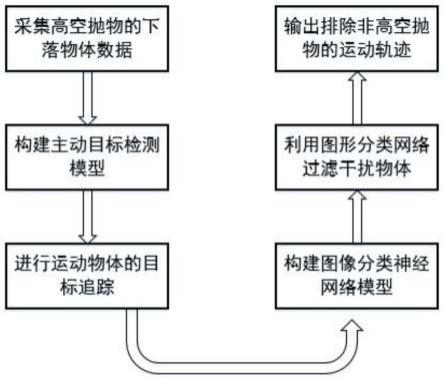
1.一种基于主动学习和神经网络的高空抛物检测方法,其特征在于,包括以下步骤:s1、采集高空抛物的下落物体数据:采集并获取真实楼宇间的视频流数据,将视频流进行抽帧并解码处理,对得到的运动物体图像帧数据进行标注;s2、构建主动目标检测模型:采用基网为resnet-50的retinanet的神经网络作为目标检测器,通过基于主动学习方法的查询策略选择样本进行标记,利用标注的信息改善预测模型;s3、进行运动物体的目标跟踪:采用动态目标跟踪算法进行预测,通过iou匹配和级联匹配关联运动帧信息,使用滤波器进行预测和更新,得到运动目标的跟踪序号、运动轨迹以及对应帧的编号信息;s4、构建图像分类神经网络模型:进行图像分类网络模型部署,通过imagenet和openimages获取数据集,对干扰物体进行分类;s5、利用图像分类网络过滤干扰物体:进行神经网络的训练和分类预测,对获取的运动目标图像进行分类网络的模型应用,根据cnn模型的分类结果,将干扰物体从输出图像中过滤;s6、排除非高空抛物的运动轨迹:对运动物体的轨迹特征设定过滤条件,根据目标的移动距离和自由落体规律来判断抛物轨迹,排除高空抛物中非正常的运动轨迹。2.根据权利要求1所述的一种基于主动学习和神经网络的高空抛物检测方法,其特征在于,所述步骤s1中,采集高空抛物的下落物体数据,具体包括以下步骤:s1-1、通过摄像头获取真实视频数据,得到包含rgb三层颜色通道的图像;s1-2、对视频抽帧解码处理,将视频数据解析为连续的图像帧数据;s1-3、对每一帧图像中的运动目标的类别进行标注,形成该帧图像的类别标签{yi,i=1,...,n}。3.根据权利要求2所述的一种基于主动学习和神经网络的高空抛物检测方法,其特征在于,所述步骤s2中,构建主动目标检测模型,具体包括以下步骤:s2-1、对步骤s1-2中的运动物体的图像帧数据进行标注;s2-2、选择基网为resnet-50的retinanet的神经网络作为基础检测器;s2-3、将步骤s2-1中标注好的图像帧数据输入主动学习的网络框架中;s2-4、定义主动学习器active learner;s2-5、应用目标检测模型获取运动目标的bounding box。4.根据权利要求3所述的一种基于主动学习和神经网络的高空抛物检测方法,其特征在于,步骤s2-4中定义主动学习器active learner具体包括以下步骤:s2-4-1、定义模型参数和应用于请求标注的查询策略;s2-4-1-1、对于预测的bounding boxb
j
的紧密度定义如下;t(b
j
)=iou(b
j
,r
j
)其中,r
j
为当网络预测未经调整前的候选区域region;s2-4-1-2、根据样本的紧密度t(b
j
)和置信度p
max
的不同,采用如下选择策略来更新bounding box;
s2-4-1-3、通过如下公式计算当前模型对噪声的稳定度s(b
j
);s2-4-1-4、若该稳定度s(b
j
)达到了稳定值,无需对未标记图像进行标记;s2-4-1-5、对步骤s2-4-1-3中未达到稳定值的s(b
j
),采用如下公式进行更新;s2-4-2、使用基于不确定性的主动学习方法,返回策略选择出需要标注的数据;s2-4-3、判断模型精度是否达到要求,利用查询函数选取对提高模型精度最有用的数据进行人工标注;s2-4-4、将步骤s2-4-3中的数据按照查询标准加到训练集样本中循环查询。5.根据权利要求4所述的一种基于主动学习和神经网络的高空抛物检测方法,其特征在于,所述步骤s3中,进行运动物体的目标跟踪,包括以下步骤:s3-1、计算当前t时刻运动目标的检测框bounding box与上一时刻的检测框交并比iou;s3-2、判断计算结果是否小于预设的阈值,如果是,则认为匹配失败,进行卡尔曼滤波预测;s3-3、初始化一个新的卡尔曼滤波器,记录当前运动目标的跟踪序号以及对应帧的编号信息;s3-4、利用卡尔曼滤波器预测运动目标在当前帧的位置以及跟踪框track和检测框detection;s3-5、使用卡尔曼滤波器基于前一个状态对运动目标当前的状态进行预测,计算当前帧和下一帧之间的信息差;s3-6、使用匹配算法进行级联匹配,将当前帧中的跟踪框track与下一帧中的检测框detection进行关联;s3-7、使用卡尔曼滤波基于步骤s3-2中的detection来更新预测的位置;s3-8、获得运动物体的跟踪轨迹path-pred∈r
tx4xn
,同时获取非正常运动目标的运动图像数据path-abpred∈r
tx4xn
。6.根据权利要求5所述的一种基于主动学习和神经网络的高空抛物检测方法,其特征在于,所述步骤s4中,构建图像分类网络训练模型,具体包括以下步骤:s4-1、使用imagenet和谷歌openimages,获取干扰物体的数据集dataset_one;s4-2、进行数据预处理和数据增强;s4-3、定义图像分类的cnn模型,共7层神经网络,其中1、3、5层为卷积层conv2d,2、4层为池化层,后2层为全连接层dense。7.根据权利要求6所述的一种基于主动学习和神经网络的高空抛物检测方法,其特征在于,步骤s4-3的具体步骤如下:
s4-3-1、卷积层c1使用6个大小为5
×
5的卷积核,步长stride=1,对输入层进行卷积运算,使用激活函数tanh,并为模型提供输入形状,产生6个大小为28
×
28的特征图map
one
;s4-3-2、池化层s2采用max_pool进行池化,步长stride=2,通过上述池化减小数据维度,池化size=2
×
2,经池化后得到6个14
×
14的特征图map
two
,作为下一层神经元的输入;s4-3-3、卷积层c3使用16个大小为5
×
5的卷积核,步长stride=1,输出为16个10
×
10的特征图map
three
;s4-3-4、池化层s4采用max_pool池化,步长stride=2,池化大小为2
×
2,输出16个5
×
5的特征图map
four
,神经元个数减少至16
×5×
5=400;s4-3-5、卷积层c5继续使用5
×
5大小的卷积核对s4层的输出进行卷积,卷积核数量增加120,步长stride=1,输出120个1
×
1的特征图map
five
;s4-3-6、全连接层f6与c5层全连接,输出84张特征图map
six
;s4-3-7、全连接层f7输出长度为5的张量,代表所抽取的特征所属干扰物体。8.根据权利要求7所述的一种基于主动学习和神经网络的高空抛物检测方法,其特征在于:所述步骤s4-3-7中的干扰物体为飞鸟、飞虫、树叶、被子、衣服。9.按照权利要求8所述的一种基于主动学习和神经网络的高空抛物检测方法,其特征在于,所述步骤s5中,所述利用图像分类网络排序干扰物体,具体包括以下步骤:s5-1、定义训练参数和输入;s5-2、进行神经网络模型训练;s5-3、使用神经网络模型预测;s5-4、应用图像分类网络,对步骤s3-9中的运动目标进行图像分类;s5-5、若输出类别为飞鸟、飞虫、树叶等干扰物体,则将该图像从数据图像中过滤删除,保留高空抛物中的运动目标,避免误检误报事件。10.按照权利要求9所述的一种基于主动学习和神经网络的高空抛物检测方法,其特征在于,所述步骤s6中,所述排除非高空抛物的运动轨迹,具体包括以下步骤:s6-1、根据高空抛物的判断条件进行轨迹选择,设置运动物体的轨迹纵坐标阈值为m,跟踪帧数阈值t;s6-2、排除满足s6-1判断条件的运动轨迹,同时给出高空抛物中运动物体的位置和轨迹信息。
技术总结
本发明公开了一种基于主动学习和神经网络的高空抛物检测方法,涉及目标检测技术领域,本发明的辨识步骤为:采集高空抛物下落物体数据、构建主动目标检测模型、进行运动物体的目标跟踪、构建图像分类神经网络模型、利用图像分类网络过滤干扰物体、排除非高空抛物的运动轨迹。本发明采用主动学习方法通过查询策略选择少量样本进行标记,从而利用标注的信息来改善预测模型;利用分类网络通过模型的训练和分类结果,将干扰物体从检测结果中过滤,可以解决高空抛物场景中对飞鸟、飞虫、树叶的误检测问题,从而降低跟踪成本。从而降低跟踪成本。从而降低跟踪成本。
技术研发人员:刘建 周云龙 段刘祺 段萌 卢中源 吴子文 陈良宇 毛江华 车杰
受保护的技术使用者:合肥工业大学
技术研发日:2022.11.16
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。