1.本发明属于结构损伤监测技术领域,尤其涉及一种用于结构损伤监测的电阻抗成像方法和系统。
背景技术:
2.航空发动机及燃气轮机的核心部件工作于高温高压的极端环境,其零部件易产生机械疲劳以及热烧蚀等损伤。由于航空发动机及燃气轮机结构复杂难以拆卸,使得超声波、红外热成像以及xct等探伤技术难以对其内部结构进行快速、实时的原位损伤监测。电阻抗层析成像技术(electrical impedance tomography,eit)以其非侵入、结构简单以及响应速度快等优点,有望弥补传统的工业探伤技术的缺点,实现在高温高压环境下进行实时准确的损伤监测。该技术通过结构外部边界的电压反演出结构内部的电阻率分布情况,监测人员通过分析电阻率的分布情况的来判断结构内部是否存在损伤。
3.然而,在实际应用电阻抗成像技术的过程中,由于获取的激励电压数据有限,通常远低于需要反演的未知量个数,使得多数eit算法需要经过多次迭代计算后才能获得较为精准的电阻值分布结果。多次迭代将会造成计算效率的降低。为了提升eit成像的速度,专利cn102008303b公开了一种电阻抗成像系统频差fnoser成像方法,该算法的特点是仅需在设定的初始电阻率的基础上迭代一次,即可得到一组与实际电阻率分布情况近似的解,因此基于频差fnoser算法相较于其他算法,具有显著的速度优势,能够满足工程上对监测速度的需要。然而其核心思想本质上为更早期的eit重构算法noser算法,亦称作一步牛顿法。fnoser算法与noser算法的区别仅在于,fnoser算法将noser算法中所要用到的jacobi矩阵及其逆矩阵进行预存,在需要进行图像重建的时候直接调用,从而减小算法计算量,提高算法运行效率。然而fnoser算法所存在的问题是解的精度不足。采用一步牛顿法获得的阻值图像具有分辨率低和轮廓模糊的问题。因此,有必要提供一种高效高精度的电阻抗成像方法,以期实现在具有较高计算速度的同时,又能保有较高的图像重建精度。
技术实现要素:
4.本发明针对现有技术中的不足,提供一种用于结构损伤监测的电阻抗成像方法和系统。
5.第一方面,本发明提供一种用于结构损伤监测的电阻抗成像方法,包括:
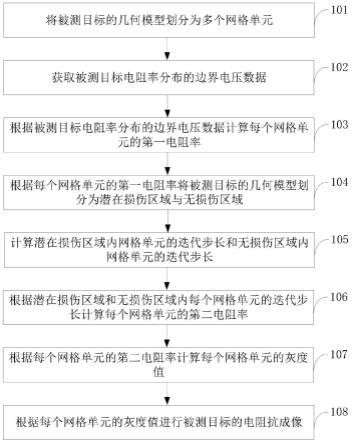
6.将被测目标的几何模型划分为多个网格单元;
7.获取被测目标电阻率分布的边界电压数据;
8.根据被测目标电阻率分布的边界电压数据计算每个网格单元的第一电阻率;
9.根据每个网格单元的第一电阻率将被测目标的几何模型划分为潜在损伤区域与无损伤区域;
10.计算潜在损伤区域内网格单元的迭代步长和无损伤区域内网格单元的迭代步长;
11.根据潜在损伤区域和无损伤区域内每个网格单元的迭代步长计算每个网格单元
的第二电阻率;
12.根据每个网格单元的第二电阻率计算每个网格单元的灰度值;
13.根据每个网格单元的灰度值进行被测目标的电阻抗成像。
14.进一步地,所述根据被测目标电阻率分布的边界电压数据计算每个网格单元的第一电阻率,包括:
15.根据以下公式计算每个网格单元的第一电阻率:
16.σ=σ
0-[[j(σ0)]
t
j(σ0) γdiag(j
t
j)]-1
[j(σ0)][v(σ0)-u];
[0017]
其中,σ为每个网格单元的第一电阻率;j为雅可比矩阵;γ为正则化系数;t表示矩阵的转置;v(
·
)为求解正问题的前向算子;u为被测目标电阻率分布的边界电压数据;σ0为初始电阻率估计值;
[0018]
根据以下公式计算初始电阻率估计值:
[0019][0020]
其中,u
ij
为对第i对电极进行电流激励的情况下,第j对电极上的电压实测值;v
ij
为在电阻率分布为单位电阻率分布的情况下,对第i对电极进行电流激励时,第j对电极上的电压理论值;n电极的总对数。
[0021]
进一步地,所述根据每个网格单元的第一电阻率将被测目标的几何模型划分为潜在损伤区域与无损伤区域,包括:
[0022]
设定网格单元损伤阈值、邻域半径和最小邻域点数量;
[0023]
获取所有网格单元的第一电阻率中的最大值;
[0024]
计算每个网格单元的第一电阻率与所有网格单元的第一电阻率中的最大值的比值;
[0025]
将比值大于网格单元损伤阈值对应的网格单元标记为潜在损伤网格单元;
[0026]
获取每个潜在损伤网格单元的中心坐标;
[0027]
以目标标签任意标记一个潜在损伤网格单元并以标记的潜在损伤网格单元中心为圆心;
[0028]
在以标记的潜在损伤网格单元中心为圆心,半径为邻域半径的圆内的潜在损伤网格单元数量大于最小邻域点数量的情况下,将以标记的潜在损伤网格单元中心为圆心,半径为邻域半径的圆内的潜在损伤网格单元以目标标签进行标记;
[0029]
遍历所有潜在损伤网格单元,得到潜在损伤区域。
[0030]
进一步地,所述计算潜在损伤区域内网格单元的迭代步长和无损伤区域内网格单元的迭代步长,包括:
[0031]
根据以下条件选取goldstein步长:
[0032]
f(σk αdk)∈[f(σk) (1-ε)αg
ktdk
,f(σk) εαg
ktdk
];
[0033]
其中,dk为牛顿步长,dk=f
″
(σk)-1f′
(σk);gk=
▽
f(σk),
▽
为梯度算子,σk为第k次迭代计算下所得到的电阻率分布结果;α为goldstein步长,
为一维向量,维度与总的网格单元数量相同,α∈[0,1];ε为经验参数k为第k次迭代;t表示矩阵的转置;网格单元位于潜在损伤区域内时,α的值接近1;网格单元位于无损伤区域内时,α的值接近0;
[0034]
将牛顿步长和goldstein步长的乘积作为对应网格单元的迭代步长。
[0035]
进一步地,所述根据潜在损伤区域和无损伤区域内每个网格单元的迭代步长计算每个网格单元的第二电阻率,包括:
[0036]
根据以下公式计算每个网格单元的第二电阻率:
[0037]
σ
′
=σ
0-α[[j(σ0)]
t
j(σ0) γdiag(j
t
j)]-1
[j(σ0)][v(σ0)-u];
[0038]
其中,σ
′
为每个网格单元的第二电阻率。
[0039]
进一步地,所述根据每个网格单元的第二电阻率计算每个网格单元的灰度值,包括:
[0040]
根据以下公式计算每个网格单元的灰度值:
[0041][0042]
其中,σi为第i个网格单元的第二电阻率;σ
max
为所有网格单元的第二电阻率中的最大值;σ
min
为所有网格单元的第二电阻率中的最小值。
[0043]
第二方面,本发明提供一种用于结构损伤监测的电阻抗成像系统,包括:
[0044]
网格单元划分模块,用于将被测目标的几何模型划分为多个网格单元;
[0045]
边界电压数据获取模块,用于获取被测目标电阻率分布的边界电压数据;
[0046]
第一计算模块,用于根据被测目标电阻率分布的边界电压数据计算每个网格单元的第一电阻率;
[0047]
区域划分模块,用于根据每个网格单元的第一电阻率将被测目标的几何模型划分为潜在损伤区域与无损伤区域;
[0048]
第二计算模块,用于计算潜在损伤区域内网格单元的迭代步长和无损伤区域内网格单元的迭代步长;
[0049]
第三计算模块,用于根据潜在损伤区域和无损伤区域内每个网格单元的迭代步长计算每个网格单元的第二电阻率;
[0050]
第四计算模块,用于根据每个网格单元的第二电阻率计算每个网格单元的灰度值;
[0051]
电阻抗成像模块,用于根据每个网格单元的灰度值进行被测目标的电阻抗成像。
[0052]
进一步地,所述第一计算模块包括:
[0053]
第一计算单元,用于根据以下公式计算每个网格单元的第一电阻率:
[0054]
σ=σ
0-[[j(σ0)]
t
j(σ0) γdiag(j
t
j)]-1
[j(σ0)][v(σ0)-u];
[0055]
其中,σ为每个网格单元的第一电阻率;j为雅可比矩阵;γ为正则化系数;t表示矩阵的转置;v(
·
)为求解正问题的前向算子;u为被测目标电阻率分布的边界电压数据;σ0为初始电阻率估计值;
[0056]
第二计算单元,用于根据以下公式计算初始电阻率估计值:
[0057][0058]
其中,u
ij
为对第i对电极进行电流激励的情况下,第j对电极上的电压实测值;v
ij
为在电阻率分布为单位电阻率分布的情况下,对第i对电极进行电流激励时,第j对电极上的电压理论值;n电极的总对数。
[0059]
进一步地,所述区域划分模块包括:
[0060]
数值设定单元,用于设定网格单元损伤阈值、邻域半径和最小邻域点数量;
[0061]
第一获取单元,用于获取所有网格单元的第一电阻率中的最大值;
[0062]
第三计算单元,用于计算每个网格单元的第一电阻率与所有网格单元的第一电阻率中的最大值的比值;
[0063]
第一标记单元,用于将比值大于网格单元损伤阈值对应的网格单元标记为潜在损伤网格单元;
[0064]
第二获取单元,用于获取每个潜在损伤网格单元的中心坐标;
[0065]
第二标记单元,用于以目标标签任意标记一个潜在损伤网格单元并以标记的潜在损伤网格单元中心为圆心;
[0066]
第三标记单元,用于在以标记的潜在损伤网格单元中心为圆心,半径为邻域半径的圆内的潜在损伤网格单元数量大于最小邻域点数量的情况下,将以标记的潜在损伤网格单元中心为圆心,半径为邻域半径的圆内的潜在损伤网格单元以目标标签进行标记;
[0067]
遍历单元,要用于遍历所有潜在损伤网格单元,得到潜在损伤区域。
[0068]
进一步地,所述第二计算模块包括:
[0069]
步长选取单元,用于根据以下条件选取goldstein步长:
[0070][0071]
其中,dk为牛顿步长,dk=f
″
(σk)-1f′
(σk);为梯度算子,σk为第k次迭代计算下所得到的电阻率分布结果;α为goldstein步长,为一维向量,维度与总的网格单元数量相同,α∈[0,1];ε为经验参数k为第k次迭代;t表示矩阵的转置;网格单元位于潜在损伤区域内时,α的值接近1;网格单元位于无损伤区域内时,α的值接近0;
[0072]
第四计算单元,用于将牛顿步长和goldstein步长的乘积作为对应网格单元的迭代步长。
[0073]
本发明提供一种用于结构损伤监测的电阻抗成像方法和系统,其中方法包括将被测目标的几何模型划分为多个网格单元;获取被测目标电阻率分布的边界电压数据;根据被测目标电阻率分布的边界电压数据计算每个网格单元的第一电阻率;根据每个网格单元的第一电阻率将被测目标的几何模型划分为潜在损伤区域与无损伤区域;计算潜在损伤区域内网格单元的迭代步长和无损伤区域内网格单元的迭代步长;根据潜在损伤区域和无损伤区域内每个网格单元的迭代步长计算每个网格单元的第二电阻率;根据每个网格单元的
第二电阻率计算每个网格单元的灰度值;根据每个网格单元的灰度值进行被测目标的电阻抗成像。
[0074]
本发明与传统的noser算法相比,本发明将被测目标划分为潜在损伤区域与无损伤区域,并针对不同的区域施加不同的迭代步长,提升了算法求解的精度以及成像的分辨率。newton-raphson算法、mnr算法、landweber算法等传统的eit算法需要反复计算雅可比矩阵,而本发明所提出的算法在整个过程中仅计算了一次雅可比矩阵,计算效率更高更高。
附图说明
[0075]
为了更清楚地说明本发明的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0076]
图1为本发明实施例提供的一种用于结构损伤监测的电阻抗成像方法的流程图;
[0077]
图2为本发明实施例提供的损伤识别算法的结构示意图;
[0078]
图3为本发明实施例提供的成像效果对比图;
[0079]
图4为本发明实施例提供的损伤识别算法的流程图;
[0080]
图5为本发明实施例提供的一种用于结构损伤监测的电阻抗成像系统的结构示意图。
具体实施方式
[0081]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0082]
在一实施例中,如图1所示,本发明提供一种用于结构损伤监测的电阻抗成像方法,包括:
[0083]
步骤101,将被测目标的几何模型划分为多个网格单元。
[0084]
采用有限元法将被测目标的几何模型划分为多个网格单元。
[0085]
步骤102,获取被测目标电阻率分布的边界电压数据。
[0086]
在被测目标周围布置多个电极,并在测量过程中,使用直流恒流电流源轮流激励相邻的两电极,有电流激励的电极成为激励电极,在激励的过程中,采集除激励电极以外的其他相邻的电极间的电位差,以得到生成一帧图像所需的边界电压数据。举例说明如下:
[0087]
假设在矩形板材周围布置多个电极,使用直流恒流电流源轮流激励相邻的两个电极,同时采集除激励电极以外的其他相邻的电极间的电位差,测量完毕后,改变激励电流所施加的电极,并进行相应的电位差测量,当所布置的全部电极都成为过激励电极后,记录全部的电压数据,可记为向量u。
[0088]
其中,本实施例中的多个电极可以为16个,但不限于此。本发明对电极数量不做具体限定。
[0089]
需要说明的是,在本实施例中,除了可以针对矩形板材进行电极布置外,还可以在圆形或者其他形状的实心的结构件的周围布置电极。具体布置的对象根据实际工程中期望
监测损伤的结构而定,本发明不做具体限定。
[0090]
步骤103,根据被测目标电阻率分布的边界电压数据计算每个网格单元的第一电阻率。
[0091]
根据以下公式计算每个网格单元的第一电阻率:
[0092]
σ=σ
0-[[j(σ0)]
t
j(σ0) γdiag(j
t
j)]-1
[j(σ0)][v(σ0)-u]。
[0093]
其中,σ为每个网格单元的第一电阻率;j为雅可比矩阵;γ为正则化系数;t表示矩阵的转置;v(
·
)为求解正问题的前向算子;u为被测目标电阻率分布的边界电压数据;σ0为初始电阻率估计值。
[0094]
根据以下公式计算初始电阻率估计值:
[0095][0096]
其中,u
ij
为对第i对电极进行电流激励的情况下,第j对电极上的电压实测值;v
ij
为在电阻率分布为单位电阻率分布的情况下,对第i对电极进行电流激励时,第j对电极上的电压理论值;n电极的总对数。
[0097]
步骤104,根据每个网格单元的第一电阻率将被测目标的几何模型划分为潜在损伤区域与无损伤区域。
[0098]
首先设定网格单元损伤阈值β、邻域半径r和最小邻域点数量minpts;其中,其中网格单元损伤阈值需根据实际材料特性选取,本实施例为0.7。
[0099]
获取所有网格单元的第一电阻率中的最大值。
[0100]
计算每个网格单元的第一电阻率与所有网格单元的第一电阻率中的最大值的比值。
[0101]
将比值大于网格单元损伤阈值对应的网格单元标记为潜在损伤网格单元。
[0102]
获取每个潜在损伤网格单元的中心坐标。
[0103]
以目标标签任意标记一个潜在损伤网格单元并以标记的潜在损伤网格单元中心为圆心。
[0104]
在以标记的潜在损伤网格单元中心为圆心,半径为邻域半径的圆内的潜在损伤网格单元数量大于最小邻域点数量的情况下,将以标记的潜在损伤网格单元中心为圆心,半径为邻域半径的圆内的潜在损伤网格单元以目标标签进行标记。
[0105]
遍历所有潜在损伤网格单元,得到潜在损伤区域。
[0106]
可选地,如图4所示,将所有被标记为潜在损伤网格单元简化为一个个数据点,每一个数据点包含网格单元的单元编号以及网格单元中心点坐标。
[0107]
在所有数据点中,首先随机对一个数据点以目标标签进行标记,如图2中a所示,本实施例中以黑色圆点表示。若以随机标记的数据点为圆心,半径为r的圆域内的数据点数大于minpts,则该标记将会向四周传播,被传播的数据点将获得与随机标记的数据点相同的目标标签,如图2中b所示;若圆域内的数据点数小于minpts,则标记传播终止。
[0108]
对于新获得目标标签的数据点,通过检验其半径为r的圆域内的其他数据点数是否大于minpts来判断其是否具有继续传播目标标签的能力。同时规定已经向周围传播过目
标标签的数据点亦将失去传播能力,如图2中c和d所示。
[0109]
当所有具有与随机标记的数据点相同的目标标签的数据点都不再具有传播能力后,此时算法将生成一个新的标签在未被传播的数据点中进行传播,如图2中e所示。当全体数据点都被遍历过后,具有相同标签的数据点被认为属于同一簇群。每一簇数据点在宏观上体现为一块损伤区域,如图2中f所示。远离簇群的零散数据点不满足标记传播的条件(数量小于minpts)无法获得标签,所以将被判定为噪声点或误差数据点,这些点所对应的区域会被判定为无损伤区域。
[0110]
通过上述的损伤识别算法对数据点进行处理后,能够划定出潜在损伤区域。
[0111]
步骤105,计算潜在损伤区域内网格单元的迭代步长和无损伤区域内网格单元的迭代步长。
[0112]
若网格单元对应的数据点具有与潜在损伤区域数据点相同的标签,则认为该网格单元处在潜在损伤区域中。
[0113]
对于在潜在损伤区域内的网格单元,采用牛顿法对其进行重新迭代。
[0114]
根据以下条件选取goldstein步长:
[0115][0116]
其中,dk为牛顿步长,dk=f
″
(σk)-1f′
(σk);为梯度算子,σk为第k次迭代计算下所得到的电阻率分布结果;α为goldstein步长,为一维向量,维度与总的网格单元数量相同,α∈[0,1];ε为经验参数k为第k次迭代;t表示矩阵的转置;网格单元位于潜在损伤区域内时,α的值接近1;网格单元位于无损伤区域内时,α的值接近0;
[0117]
将牛顿步长和goldstein步长的乘积作为对应网格单元的迭代步长。
[0118]
步骤106,根据潜在损伤区域和无损伤区域内每个网格单元的迭代步长计算每个网格单元的第二电阻率。
[0119]
根据以下公式计算每个网格单元的第二电阻率:
[0120]
σ
′
=σ
0-α[[j(σ0)]
t
j(σ0) γdiag(j
t
j)]-1
[j(σ0)][v(σ0)-u]。
[0121]
其中,σ
′
为每个网格单元的第二电阻率。
[0122]
步骤107,根据每个网格单元的第二电阻率计算每个网格单元的灰度值。
[0123]
根据以下公式计算每个网格单元的灰度值:
[0124][0125]
其中,σi为第i个网格单元的第二电阻率;σ
max
为所有网格单元的第二电阻率中的最大值;σ
min
为所有网格单元的第二电阻率中的最小值。
[0126]
步骤108,根据每个网格单元的灰度值进行被测目标的电阻抗成像。
[0127]
对于本实施例,传统的noser算法成像速度为15~16ms/帧,本发明提供的用于结构损伤监测的电阻抗成像方法成像速度为16~17ms/帧,未产生明显的时间成本。但从图3中的对比中可以看出,本发明提供的用于结构损伤监测的电阻抗成像方法在图像对比度和
边界清晰度上具有明显的优势,且有效的清除了图像边缘区域的伪影。
[0128]
基于同一发明构思,本发明实施例还提供了一种用于结构损伤监测的电阻抗成像系统,由于该系统解决问题的原理与前述用于结构损伤监测的电阻抗成像方法相似,因此该系统的实施可以参见用于结构损伤监测的电阻抗成像方法的实施,重复之处不再赘述。
[0129]
在另一实施例中,本发明一个实施例提供的用于结构损伤监测的电阻抗成像系统,如图5所示,包括:
[0130]
网格单元划分模块10,用于将被测目标的几何模型划分为多个网格单元。
[0131]
边界电压数据获取模块20,用于获取被测目标电阻率分布的边界电压数据。
[0132]
第一计算模块30,用于根据被测目标电阻率分布的边界电压数据计算每个网格单元的第一电阻率。
[0133]
区域划分模块40,用于根据每个网格单元的第一电阻率将被测目标的几何模型划分为潜在损伤区域与无损伤区域。
[0134]
第二计算模块50,用于计算潜在损伤区域内网格单元的迭代步长和无损伤区域内网格单元的迭代步长。
[0135]
第三计算模块60,用于根据潜在损伤区域和无损伤区域内每个网格单元的迭代步长计算每个网格单元的第二电阻率。
[0136]
第四计算模块70,用于根据每个网格单元的第二电阻率计算每个网格单元的灰度值。
[0137]
电阻抗成像模块80,用于根据每个网格单元的灰度值进行被测目标的电阻抗成像。
[0138]
可选地,所述第一计算模块包括:
[0139]
第一计算单元,用于根据以下公式计算每个网格单元的第一电阻率:
[0140]
σ=σ
0-[[j(σ0)]
t
j(σ0) γdiag(j
t
j)]-1
[j(σ0)][v(σ0)-u]。
[0141]
其中,σ为每个网格单元的第一电阻率;j为雅可比矩阵;γ为正则化系数;t表示矩阵的转置;v(
·
)为求解正问题的前向算子;u为被测目标电阻率分布的边界电压数据;σ0为初始电阻率估计值。
[0142]
第二计算单元,用于根据以下公式计算初始电阻率估计值:
[0143][0144]
其中,u
ij
为对第i对电极进行电流激励的情况下,第j对电极上的电压实测值;v
ij
为在电阻率分布为单位电阻率分布的情况下,对第i对电极进行电流激励时,第j对电极上的电压理论值;n电极的总对数。
[0145]
可选地,所述区域划分模块包括:
[0146]
数值设定单元,用于设定网格单元损伤阈值、邻域半径和最小邻域点数量。
[0147]
第一获取单元,用于获取所有网格单元的第一电阻率中的最大值。
[0148]
第三计算单元,用于计算每个网格单元的第一电阻率与所有网格单元的第一电阻率中的最大值的比值。
[0149]
第一标记单元,用于将比值大于网格单元损伤阈值对应的网格单元标记为潜在损伤网格单元。
[0150]
第二获取单元,用于获取每个潜在损伤网格单元的中心坐标。
[0151]
第二标记单元,用于以目标标签任意标记一个潜在损伤网格单元并以标记的潜在损伤网格单元中心为圆心。
[0152]
第三标记单元,用于在以标记的潜在损伤网格单元中心为圆心,半径为邻域半径的圆内的潜在损伤网格单元数量大于最小邻域点数量的情况下,将以标记的潜在损伤网格单元中心为圆心,半径为邻域半径的圆内的潜在损伤网格单元以目标标签进行标记。
[0153]
遍历单元,要用于遍历所有潜在损伤网格单元,得到潜在损伤区域。
[0154]
可选地,所述第二计算模块包括:
[0155]
步长选取单元,用于根据以下条件选取goldstein步长:
[0156][0157]
其中,dk为牛顿步长,dk=f
″
(σk)-1f′
(σk);为梯度算子,σk为第k次迭代计算下所得到的电阻率分布结果;α为goldstein步长,为一维向量,维度与总的网格单元数量相同,α∈[0,1];ε为经验参数k为第k次迭代;t表示矩阵的转置;网格单元位于潜在损伤区域内时,α的值接近1;网格单元位于无损伤区域内时,α的值接近0;
[0158]
第四计算单元,用于将牛顿步长和goldstein步长的乘积作为对应网格单元的迭代步长。
[0159]
可选地,所述第三计算模块包括:
[0160]
第五计算单元,用于根据以下公式计算每个网格单元的第二电阻率:
[0161]
σ
′
=σ
0-α[[j(σ0)]
t
j(σ0) γdiag(j
t
j)]-1
[j(σ0)][v(σ0)-u]。
[0162]
其中,σ
′
为每个网格单元的第二电阻率。
[0163]
可选地,所述第四计算模块包括:
[0164]
第六计算单元,用于根据以下公式计算每个网格单元的灰度值:
[0165][0166]
其中,σi为第i个网格单元的第二电阻率;σ
max
为所有网格单元的第二电阻率中的最大值;σ
min
为所有网格单元的第二电阻率中的最小值。
[0167]
关于上述各个模块更加具体的工作过程可以参考前述实施例公开的相应内容,在此不再进行赘述。
[0168]
以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。