技术特征:
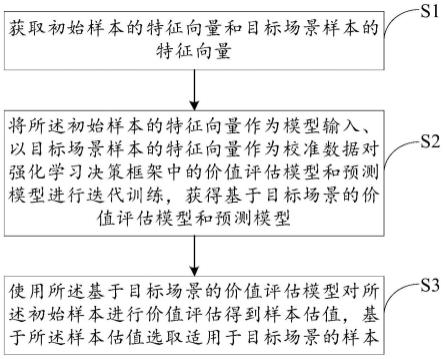
1.一种基于目标场景的遥感影像样本优选方法,其特征在于,包括以下步骤:s1:获取初始样本的特征向量和目标场景样本的特征向量;s2:将所述初始样本的特征向量作为模型输入、以所述目标场景样本的特征向量作为校准数据对强化学习决策框架中的价值评估模型和预测模型进行迭代训练,获得基于目标场景的价值评估模型和预测模型;s3:使用所述基于目标场景的价值评估模型对所述初始样本进行价值评估得到样本估值,基于所述样本估值选取适用于目标场景的样本。2.根据权利要求1所述的基于目标场景的遥感影像样本优选方法,其特征在于,步骤s2包括:s21:对所述初始样本的特征向量进行分组,获得分组后的样本的特征向量;s22:将各分组后的样本的特征向量输入至所述强化学习决策框架中的价值评估模型,得到各组样本的估值;s23:根据各组样本的估值的概率分布,筛选估值满足预设要求的初始样本的特征向量并输入所述强化学习决策框架中的预测模型;s24:以目标场景样本的特征向量作为校准数据,基于损失和奖励策略通过所述预测模型计算损失和奖励;s25:基于所述损失,优化所述预测模型,并将所述奖励回馈至所述价值评估模型进行模型优化;s26:迭代步骤s21-s25至预设迭代次数,得到基于目标场景的价值评估模型和预测模型。3.根据权利要求2所述的基于目标场景的遥感影像样本优选方法,其特征在于,步骤s24包括:基于预测模型的输出值和所述校准数据,使用损失函数计算损失;根据所述损失计算并更新移动平均损失;基于所述损失和所述移动平均损失计算奖励,其中,所述损失用于指导降低奖励,所述移动平均损失用于指导提升奖励。4.根据权利要求3所述的基于目标场景的遥感影像样本优选方法,其特征在于,所述根据所述损失计算并更新移动平均损失,包括:根据所述损失,通过以下公式计算并更新移动平均损失其中,l
avg
为移动平均损失,t为移动平均周期,vk为校准数据,n为校准数据的数量,lp为本次计算得到的损失。5.根据权利要求1所述的基于目标场景的遥感影像样本优选方法,其特征在于,步骤s3包括:将所述初始样本的特征向量输入所述基于目标场景的价值评估模型,得到所述初始样本的样本估值;基于所述样本估值的分布,对所述初始样本的估值进行二值化采样,得到仅包含0和1的优选估值;
选取所述优选估值为1的样本作为适用于目标场景的样本。6.根据权利要求1所述的基于目标场景的遥感影像样本优选方法,其特征在于,步骤s1包括:使用卷积神经网络获取初始样本的特征图和目标场景样本的特征图,将所述特征图转化为特征向量的形式,以获得初始样本和目标场景样本的特征向量;或,使用预设特征提取算子对初始样本和目标场景样本进行特征提取,获得初始样本和目标场景样本的特征向量,其中,所述预设特征提取算子包括sift、hog或lbp。
技术总结
本发明公开了一种基于目标场景的遥感影像样本优选方法,该方法包括:获取初始样本的特征向量和目标场景样本的特征向量;将所述初始样本的特征向量作为模型输入、以目标场景样本的特征向量作为校准数据对强化学习决策框架中的价值评估模型和预测模型进行迭代训练,获得基于目标场景的价值评估模型和预测模型;使用所述基于目标场景的价值评估模型对所述初始样本进行价值评估得到样本估值,基于所述样本估值选取适用于目标场景的样本。该方法将强化学习技术用于基于目标场景的遥感影像样本优选,实现了基于目标场景的低计算成本下的精准样本优选。精准样本优选。精准样本优选。
技术研发人员:张广益 贾若愚 陈宇 彭哲 万珍会 邹圣兵
受保护的技术使用者:北京数慧时空信息技术有限公司
技术研发日:2022.10.08
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。