技术特征:
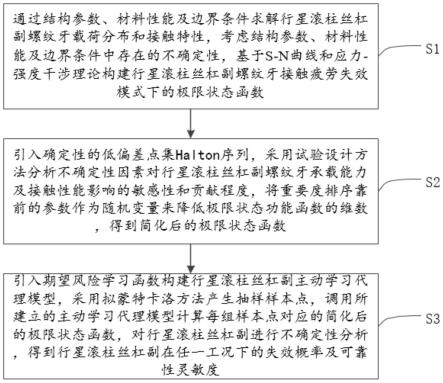
1.一种行星滚柱丝杠副的不确定性分析方法,其特征在于,包括以下步骤:s1、通过结构参数、材料性能及边界条件求解行星滚柱丝杠副螺纹牙载荷分布和接触特性,考虑结构参数、材料性能及边界条件中存在的不确定性,基于s-n曲线和应力-强度干涉理论构建行星滚柱丝杠副螺纹牙接触疲劳失效模式下的极限状态函数;s2、引入确定性的低偏差点集halton序列,采用试验设计方法分析不确定性因素对行星滚柱丝杠副螺纹牙承载能力及接触性能影响的敏感性和贡献程度,将重要度排序靠前的参数作为随机变量来降低极限状态功能函数的维数,得到简化后的极限状态函数;s3、引入期望风险学习函数构建行星滚柱丝杠副主动学习代理模型,采用拟蒙特卡洛方法产生抽样样本点,调用所建立的主动学习代理模型计算每组样本点对应的简化后的极限状态函数,对行星滚柱丝杠副进行不确定性分析,得到行星滚柱丝杠副在任一工况下的失效概率及可靠性灵敏度。2.如权利要求1所述的行星滚柱丝杠副的不确定性分析方法,其特征在于,步骤s1中,通过结构参数、材料性能及边界条件求解行星滚柱丝杠副螺纹牙载荷分布和接触特性,包括:采用迭代算法求解行星滚柱丝杠副螺纹牙载荷分布模型,如下:其中,p
s
,p
r
和p
n
分别为丝杠、滚柱和螺母的螺距,τ为滚柱参与接触的螺纹牙数,z为滚柱个数,螺纹从丝杠固定端到自由端依次编号,i=1,2,
…
,τ,f为轴向外载荷,f
sri
为滚柱与丝杠接触侧第i对螺纹牙上承受的轴向载荷,f
nri
为滚柱与螺母接触侧第i对螺纹牙上承受的轴向载荷;为丝杠轴段刚度,为滚柱轴段刚度,为螺母轴段刚度,为丝杠螺纹牙刚度,为滚柱螺纹牙刚度,为螺母螺纹牙刚度;求解丝杠与滚柱的接触刚度,如下:其中,为丝杠与滚柱的接触刚度;为丝杠与滚柱第i对螺纹牙的弹性接触变形;求解螺母与滚柱螺纹副接触刚度,如下:其中,为螺母与滚柱螺纹副接触刚度,为螺母与滚柱第i对螺纹牙的弹性接触变形。3.如权利要求2所述的行星滚柱丝杠副的不确定性分析方法,其特征在于,丝杠与滚柱第i对螺纹牙的弹性接触变形的计算公式如下:
其中,k(e)和l(e)是第一类和第二类完全椭圆积分,a为接触椭圆的长半轴,b为接触椭圆的短半轴,为接触椭圆的偏心率,k
e
=b/a,为等效弹性模量,e
s
和v
s
为丝杠的弹性模量和泊松比,e
r
和v
r
为滚柱的弹性模量和泊松比,和λ为接触角和滚柱的螺旋升角。4.如权利要求1所述的行星滚柱丝杠副的不确定性分析方法,其特征在于,基于s-n曲线和应力-强度干涉理论构建行星滚柱丝杠副螺纹牙接触疲劳失效模式下的极限状态函数,如下:如下:如下:其中,x=(x1,x2,
…
x
i
…
,x
n
)为影响极限状态函数的随机变量,x
i
为第i个随机变量,n为随机变量个数,σ
hlim
为接触疲劳极限,σ
sri
为丝杠与滚柱第i对螺纹牙上的接触应力,为滚柱与丝杠接触侧上所有螺纹牙之间的最大接触应力,σ
nri
为螺母与滚柱第i对螺纹牙上的接触应力,为滚柱与螺母接触侧上所有螺纹牙之间的最大接触应力;f
sri
为滚柱与丝杠接触侧第i对螺纹牙上承受的轴向载荷,f
nri
为滚柱与螺母接触侧第i对螺纹牙上承受的轴向载荷;a为接触椭圆的长半轴,b为接触椭圆的短半轴,和λ为接触角和滚柱的螺旋升角。5.如权利要求4所述的行星滚柱丝杠副的不确定性分析方法,其特征在于,步骤s2包括:s21、对于行星滚柱丝杠副的每个随机变量x
i
在[0,1]的区间内生成halton序列,由halton序列得到输入参数矩阵为x=(x1,x2,
…
,x
i
,
…
,x
n
),其中x
i
=(x
i1
,x
i2
,
…
,x
ij
,
…
,x
in
)
t
为x
i
的样本向量;s22、响应量包括:滚柱两接触侧的最大载荷分布系数:最大接触应力和螺纹副上的局部接触应力σ
sri
,σ
nri
,通过计算得到响应矩阵为:y=(y1,y2,
…
,y
k
,
…
,y
m
),其中y
k
=(y
k1
,y
k2
,
…
,y
kj
,
…
,y
kn
)
t
为第k个响应y
k
的样本向量;s23、将矩阵x和y中的数据在[-1,1]范围内进行归一化,再用多项式响应面法将这些数据进行拟合:
s24、将多项式系数以百分比的形式来表示,可以反映每个输入参数对第k个响应量的影响程度;s25、选择重要度排序靠前的参数来降低随机变量的维数,得到简化的行星滚柱丝杠副的极限状态函数。6.如权利要求5所述的行星滚柱丝杠副的不确定性分析方法,其特征在于,步骤s3中包括:s31、在不确定域中随机生成n0=20个样本,计算简化后的极限状态功能函数值,引入期望风险学习函数构建行星滚柱丝杠副主动学习代理模型,首先构造初始的代理模型,如下:如下:u=f
t
r-1
r-f(x)其中,y=[g(x1),g(x2),
…
,g(x
n
)]
t
为具有n个样本点的真实响应函数,f(x)=[f1(x),f2(x),
…
f
i
(x),
…
,f
p
(x)]
t
为回归多项式基函数向量,β=[β1,β2,
…
β
i
,
…
,β
p
]
t
为回归系数向量,p为回归多项式的个数,r为待测点与样本点之间的相关向量函数,f=[f(x1)
t
,f(x2)
t
,
…
,f(x
n
)
t
]
t
为n
×
p阶扩展矩阵,r为n
×
n阶对称正定相关矩阵,为近似极限状态函数g(x)的估计值,为的方差,g(x)计算如下:其中,z(x)为服从n(0,σ2)正态分布的随机过程,则任意两个样本点w和x之间的协方差为:cov[z(w),z(x)]=σ2r(θ,w,x)其中,θ=[θ1,θ2,
…
,θ
n
]
t
为相关性参数,r(θ,w,x)为表示变量θ,w,x相关性的函数且可以利用连续可微的高斯相关性函数来描述为:其中,回归系数β及方差σ2可以用广义最小二乘回归方法表示为:β=(f
t
r-1
f)-1
f
t
r-1
ys32、在不确定性域中生成n
c
=105个候选样本;s33、根据初始代理模型计算n
c
个样本点的估计值和期望风险的估计值取erf值最大的点为训练点x*,计算方法如下:其中,sign(x)为符号函数,当x>0时,sign(x)=1,当x<0时,sign(x)=-1,φ()为标
准正态分布的概率密度函数,ψ()为标准正态分布的累积分布函数;s34、设置阈值或收敛条件为ε=10-5
;如果max(erf)>ε,增加x*作为新的训练点,更新行星滚柱丝杠副主动学习代理模型;s35、重复步骤s33~s35,直到max(erf)≤ε;s36、利用更新后的星滚柱丝杠副主动学习代理模型,采用拟蒙特卡洛方法产生抽样样本点,调用所建立的主动学习代理模型计算每组样本点对应的简化后的极限状态函数,对行星滚柱丝杠副进行不确定性分析,得到行星滚柱丝杠副在任一工况下的失效概率及可靠性灵敏度。7.如权利要求6所述的行星滚柱丝杠副的不确定性分析方法,其特征在于,所述采用拟蒙特卡洛方法产生抽样样本点,调用所建立的主动学习代理模型计算每组样本点对应的简化后的极限状态函数,对行星滚柱丝杠副进行不确定性分析,得到行星滚柱丝杠副在任一工况下的失效概率及可靠性灵敏度,包括:s361、对于行星滚柱丝杠副的每个随机变量xi在[0,1]的区间内生成halton序列,各变量相互独立且均为正态分布,随机变量的累积概率分布函数f(x
ij
)可表示为:其中,x
ij
为第i个随机变量的第j个样本值,f(x
i
)为随机变量x
i
的概率密度函数,n为抽样样本数,为第x
ij
对应的halton数,其中halton序列的具体生成过程为:若q为任意质数,则任意自然数j有唯一的q进制表达式:j=j0 j1q j2q2
···
j
k
q
k
j
i
∈{0,1,
···
,q-1};i=0,1,
···
,k其中,k表示lnj/lnq的整数部分,以q为底的基逆函数定义为:对于任意自然数j>0,均满足若前n个质数为q1,q2,
…
,q
n
,则n维halton序列可以表示为:s362、获得随机变量x
ij
的样本值s363、获得许用接触应力的样本点s364、计算每组随机向量的样本x
j
=(x
1j
,x
2j
,
…
,x
nj
)
t
作用下的载荷分布和局部接触特性,得到滚柱与丝杠或螺母接触侧上的最大接触应力,然后进一步计算极限状态函数g(x
j
),如果g(x
j
)≤0,状态指示函数i
f
(x
j
)=1,否则i
f
(x
j
)=0;s365、失效概率的估计及其变异系数计算如下:
其中,n
f
为失效样本数;s366、可靠性灵敏度的估计值如下:其中,f
x
(x)为随机变量的联合概率密度函数,为基本随机变量x
i
的第k个分布参数,m
i
为第i个随机变量x
i
的分布参数的数量,正态分布随机变量具有均值和标准差两个分布参数,可靠性灵敏度可以计算为:8.一种计算机可读存储介质,其特征在于,所述存储介质包括存储的程序,其中,所述程序执行如权利要求1-7任意一项所述的行星滚柱丝杠副的不确定性分析方法。9.一种电子设备,其特征在于,包括:一个或多个处理器,存储器以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行上述如权利要求1-7任意一项所述的行星滚柱丝杠副的不确定性分析方法。10.一种行星滚柱丝杠副的不确定性分析系统,其特征在于,包括以下模块:极限状态函数构建模块,用于通过结构参数、材料性能及边界条件求解行星滚柱丝杠副螺纹牙载荷分布和接触特性,考虑结构参数、材料性能及边界条件中存在的不确定性,基于s-n曲线和应力-强度干涉理论构建行星滚柱丝杠副螺纹牙接触疲劳失效模式下的极限状态函数;极限状态函数简化模块,用于引入确定性的低偏差点集halton序列,采用试验设计方法分析不确定性因素对行星滚柱丝杠副螺纹牙承载能力及接触性能影响的敏感性和贡献程度,将重要度排序靠前的参数作为随机变量来降低极限状态功能函数的维数,得到简化后的极限状态函数;
不确定性分析模块,用于引入期望风险学习函数构建行星滚柱丝杠副主动学习代理模型,采用拟蒙特卡洛方法产生抽样样本点,调用所建立的主动学习代理模型计算每组样本点对应的简化后的极限状态函数,对行星滚柱丝杠副进行不确定性分析,得到行星滚柱丝杠副在任一工况下的失效概率及可靠性灵敏度。
技术总结
本发明公开了一种行星滚柱丝杠副的不确定性分析方法及系统,本发明通过构建行星滚柱丝杠副螺纹牙接触疲劳失效模式下的极限状态函数,将极限状态函数简化,并引入期望风险学习函数构建行星滚柱丝杠副主动学习代理模型,采用拟蒙特卡洛方法产生抽样样本点,调用所建立的主动学习代理模型计算每组样本点对应的简化后的极限状态函数,对行星滚柱丝杠副进行不确定性分析,得到行星滚柱丝杠副在任一工况下的失效概率及可靠性灵敏度。可以有效减少极限状态函数功能函数调用次数,降低计算成本,提高行星滚柱丝杠副的不确定性分析效率,帮助设计者找出影响结构可靠性的主要因素,进而为产品的设计优化奠定理论基础。产品的设计优化奠定理论基础。产品的设计优化奠定理论基础。
技术研发人员:姚琴 张猛创
受保护的技术使用者:苏州科技大学
技术研发日:2022.10.27
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。