1.本发明涉及卫星故障检测技术领域,尤其涉及一种基于时空动态特征融合的卫星故障检测方法。
背景技术:
2.目前,卫星故障检测方法包括参数阈值方法、专家系统方法和数据驱动的方法,并且均有了较为广泛的研究和应用。虽然国内外学者在卫星故障检测方面取得了相关成果,但由于卫星参数众多、时空关系复杂、专业性强等特点,现有卫星故障检测方法仍存在不足,需研究新的卫星故障检测方法。
3.在卫星故障检测领域工程应用最广泛的是参数阈值上下限判断、专家系统,前者通过判断遥测参数是否超出设定的上下限范围进行故障检测,后者利用专家经验总结典型故障模式并利用规则匹配进行故障检测,这两种方法规则明确、解释性强,但严重依赖专家知识,无法检测先验知识之外的异常事件。此外,卫星数据中包括温度、压力等多个维度参数,不同维度参数间在故障时刻也存在明显变化,仅靠专家系统和阈值方法难以建模参数间联系。所以,基于数据驱动的故障检测方法逐渐受到重视,利用卫星产生的大量数据从中检测故障,可以有效克服阈值上下限、专家系统方法依赖专家先验知识的不足。对数据驱动方法而言,如何有效挖掘卫星数据变化规律是决定其故障检测性能的关键。但由于卫星故障工况较为罕见,导致数据中正负样本数量极度不平衡。此外,由于卫星机理的专业性和复杂性,而且难以覆盖所有类型的故障样本,导致训练数据缺乏标签。所以,现有数据驱动方法由于依赖故障标签,难以有效挖掘卫星数据规律,进而无法有效实现卫星故障检测。而pca、聚类等无监督方法面对卫星产生的高维、动态变化数据时,其检测性能同样受到限制。
4.因此,本发明提出基于时空动态特征融合的卫星故障检测方法。
技术实现要素:
5.本发明的目的在于:为了解决上述问题,而提出的一种基于时空动态特征融合的卫星故障检测方法。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种基于时空动态特征融合的卫星故障检测方法,包括以下步骤:
8.s1.设计基于双向lstm算法的自编码器神经网络,记为tsad
tfn
,从输入的卫星数据中提取数据的时间动态特征变量,记为latent
tfn
;
9.s2.设计基于卷积自编码器的自编码器神经网络,记为tsad
sfn
,从输入的卫星数据中提取数据的空间动态特征变量,记为latent
sfn
;
10.s3.根据步骤s1和步骤s2产生的时间动态特征变量和空间动态特征变量,融合得到卫星数据的时空动态特征变量,记为latent
tsfn
;
11.s4.设计基于transformer的神经网络,记为tsad
predict
,tsad
predict
根据步骤产生的时空动态特征变量,预测遥测参数在p帧后的值;
12.s5.利用卫星在正常工况产生的遥测数据对步骤s1-s4组成的神经网络模型进行端到端训练,得到训练好的模型,记为tsad;
13.s6.将训练数据集中所有样本输入步骤训练产生的模型,计算训练集上所有样本的故障得分;
14.s7.根据步骤在训练数据集上产生的故障得分集合,利用pot方法计算卫星故障检测阈值;
15.s8.将测试集数据输入模型tsad,依次经历步骤s1-s7,得到所有测试集样本的检测结果,计算算法在测试集上的性能指标p、r、f1,并重复进行步骤s1至s8调优方法性能;
16.s9.将待检测卫星数据样本作为模型输入,从步骤-中产生最终的预测残差,根据步骤s7产生的阈值,得到最终检测结果。
17.优选地,所述步骤s1提取卫星数据时间动态特征的方法具体包括以下步骤:
18.s11.利用滑动窗口处理原始遥测数据,得到m维连续k帧的单个输入样本,公式如下:
[0019][0020][0021]
式中:s
input
表示单个输入样本;xi,1≤i≤k表示第i帧的m维度数据;
[0022]
s12.设计基于双向lstm的自编码器神经网络tsad
tfn
,包括编码器网络和解码器网络两部分,分别记为tfn
encoder
和tfn
decoder
;
[0023]
s13.编码器网络tfn
encoder
从步骤的输出s
input
中提取时间特征编码,公式如下:
[0024]
latent
tfn
=tfn
encoder
(s
input
)
[0025]
式中:s
input
表示单个输入样本;latent
tfn
表示时间特征编码;
[0026]
s14.解码器网络对步骤提取的时间特征编码进行解码,公式如下:
[0027]otfn
=tfn
decoder
(latent
tfn
)
[0028]
式中:o
tfn
表示解码器网络输出的数据;
[0029]
s15.计算自编码器神经网络tsad
tfn
的输入s
input
与输出o
tfn
的重建误差,在步骤中作为损失函数的一部分,完成模型的训练,公式如下:
[0030][0031]
优选地,所述步骤s2提取卫星数据空间动态特征的方法具体包括以下步骤:
[0032]
s21.设计基于卷积的自编码器网络tsad
sfn
,包括编码器网络和解码器网络两部分,分别记为sfn
encoder
和sfn
decoder
;
[0033]
s22.编码器网络sfn
encoder
从步骤s11的输出s
input
中提取空间特征编码,公式如下:
[0034]
latent
sfn
=sfn
encoder
(s
input
)
[0035]
式中:latent
sfn
表示空间特征编码;
[0036]
s23.解码器网络对步骤s23提取的空间特征编码进行解码,公式如下:
[0037]osfn
=sfn
decoder
(latent
sfn
)
[0038]
式中:o
sfn
表示解码器网络输出的数据;
[0039]
s24.计算自编码器网络tsad
sfn
的输入s
input
与输出o
sfn
的重建误差,在步骤s5中作
为损失函数的一部分,完成模型的训练,公式如下:
[0040][0041]
优选地,所述步骤s3融合得到卫星数据的时空动态特征,公式如下:
[0042]
latent
tsfn
=[latent
tfn
,latent
sfn
]
[0043]
式中:latent
tsfn
表示提取的卫星数据样本时空动态特征。
[0044]
优选地,所述步骤s4预测卫星数据在p帧后的值,具体为:
[0045]
s41.设计基于transformer的卫星数据预测网络tsad
predict
;
[0046]
s42.将步骤s3得到的时空动态特征latent
tsfn
输入卫星数据预测网络tsad
predict
,得到预测值,公式如下:
[0047]opredict
=tsad
predict
(latent
tsfn
)
[0048]
式中:o
predict
表示预测的p帧后数据。
[0049]
s43.计算预测网络输出o
predict
与p帧后实际值的距离,公式如下:
[0050][0051]
式中:y
p
表示p帧后的实际数据。
[0052]
优选地,所述步骤s5训练得到神经网络模型tsad的方法具体包括以下步骤:
[0053]
s51.神经网络tsad包括三个子网络,分别为tsad
tfn
、tsad
sfn
和tsad
predict
;
[0054]
s52.根据要进行故障检测的卫星设备,选取m个模拟量遥测参数;
[0055]
s53.选取卫星在正常运行工况下该m个遥测参数的连续l帧的数据作为训练集,表示为x
train
,公式如下:
[0056][0057]
式中:l表示训练集数据的帧数,xi,1≤i≤l表示第i帧的m维度数据;
[0058]
s54.利用“谱残差”方法剔除训练集合x
train
中的野值,得到新的x
train
;
[0059]
s55.计算训练集x
train
的均值μ
train
和标准差δ
train
,对x
train
中所有样本进行归一化处理,公式如下:
[0060][0061]
s56.设定滑动窗口宽度为k,滑动步长为s,在训练集x
train
上连续滑动得到新的训练集x
train
;
[0062]
s57.重复步骤至,输出与训练集x
train
相对应的验证集x
valid
,验证集x
valid
的样本数量为x
train
中样本数量的20%至30%;
[0063]
s58.根据步骤s15、s24、s43中得到的神经网络tsad
tfn
、tsad
sfn
和tsad
predict
的损失计算模型tsad的损失,公式如下:
[0064]
loss
tsad
=λ1loss
tfn
λ2loss
sfn
λ3loss
predict
[0065]
式中:loss
tsad
表示神经网络tsad的损失,λ1、λ2、λ3为超参数,分别表示神经网络tsad
tfn
、tsad
sfn
和tsad
predict
在总损失loss
tsad
中所占的权重比例;
[0066]
s59.以最小化步骤s56的损失loss
tsad
为目标,利用反向传播算法训练得到模型
tsad。
[0067]
优选地,所述步骤s6计算训练集所有样本的故障得分的方法具体包括以下步骤:
[0068]
s61.以预测网络输出o
predict
与p帧后参数实际值的l2距离作为单个样本的故障得分;
[0069]
s62.遍历训练集的所有数据样本,计算得模型在训练集上的故障得分集合。
[0070]
优选地,所述步骤s8的计算公式如下:
[0071][0072][0073][0074]
式中:tp表示正确分类为故障的样本数目,fp表示错误分类为故障的样本数目,tn表示被正确分类为正常的样本数目,fn表示被错误分类为正常的样本数目。
[0075]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0076]
本技术中,通过同时捕捉卫星数据中的时间依赖、空间依赖,有效挖掘卫星数据深层次变化规律的挖掘,提取的卫星数据特征,不仅可用于检测故障,也可用于数据预测等技术领域,实现无需故障标签的卫星故障检测。
附图说明
[0077]
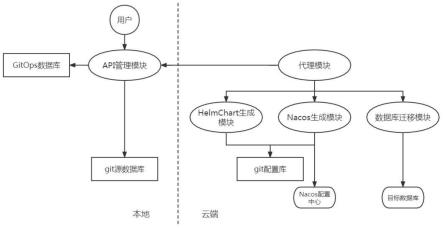
图1示出了根据本发明实施例提供的一种基于时空动态特征融合的卫星故障检测方法的总体框图结构示意图;
[0078]
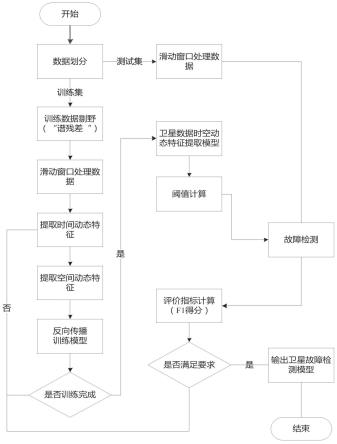
图2示出了根据本发明实施例提供的一种基于时空动态特征融合的卫星故障检测方法的总体流程图。
具体实施方式
[0079]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0080]
请参阅图1-2,本发明提供一种技术方案:
[0081]
1.一种基于时空动态特征融合的卫星故障检测方法,包括以下步骤:
[0082]
s1.设计基于双向lstm算法的自编码器神经网络,记为tsad
tfn
,从输入的卫星数据中提取数据的时间动态特征变量,记为latent
tfn
;
[0083]
s2.设计基于卷积自编码器的自编码器神经网络,记为tsad
sfn
,从输入的卫星数据中提取数据的空间动态特征变量,记为latent
sfn
;
[0084]
s3.根据步骤s1和步骤s2产生的时间动态特征变量和空间动态特征变量,融合得到卫星数据的时空动态特征变量,记为latent
tsfn
;
[0085]
s4.设计基于transformer的神经网络,记为tsad
predict
,tsad
predict
根据步骤产生的时空动态特征变量,预测遥测参数在p帧后的值;
[0086]
s5.利用卫星在正常工况产生的遥测数据对步骤s1-s4组成的神经网络模型进行端到端训练,得到训练好的模型,记为tsad;
[0087]
s6.将训练数据集中所有样本输入步骤训练产生的模型,计算训练集上所有样本的故障得分;
[0088]
s7.根据步骤在训练数据集上产生的故障得分集合,利用pot方法计算卫星故障检测阈值;
[0089]
s8.将测试集数据输入模型tsad,依次经历步骤s1-s7,得到所有测试集样本的检测结果,计算算法在测试集上的性能指标p、r、f1,并重复进行步骤s1至s8调优方法性能;
[0090]
s9.将待检测卫星数据样本作为模型输入,从步骤-中产生最终的预测残差,根据步骤s7产生的阈值,得到最终检测结果。
[0091]
具体的,如图2所示,步骤s1提取卫星数据时间动态特征的方法具体包括以下步骤:
[0092]
s11.利用滑动窗口处理原始遥测数据,得到m维连续k帧的单个输入样本,公式如下:
[0093][0094][0095]
式中:s
input
表示单个输入样本;xi,1≤i≤k表示第i帧的m维度数据;
[0096]
s12.设计基于双向lstm的自编码器神经网络tsad
tfn
,包括编码器网络和解码器网络两部分,分别记为tfn
encoder
和tfn
decoder
;
[0097]
s13.编码器网络tfn
encoder
从步骤的输出s
input
中提取时间特征编码,公式如下:
[0098]
latent
tfn
=tfn
encoder
(s
input
)
[0099]
式中:s
input
表示单个输入样本;latent
tfn
表示时间特征编码;
[0100]
s14.解码器网络对步骤提取的时间特征编码进行解码,公式如下:
[0101]otfn
=tfn
decoder
(latent
tfn
)
[0102]
式中:o
tfn
表示解码器网络输出的数据;
[0103]
s15.计算自编码器神经网络tsad
tfn
的输入s
input
与输出o
tfn
的重建误差,在步骤中作为损失函数的一部分,完成模型的训练,公式如下:
[0104][0105]
具体的,如图2所示,步骤s2提取卫星数据空间动态特征的方法具体包括以下步骤:
[0106]
s21.设计基于卷积的自编码器网络tsad
sfn
,包括编码器网络和解码器网络两部分,分别记为sfn
encoder
和sfn
decoder
;
[0107]
s22.编码器网络sfn
encoder
从步骤s11的输出s
input
中提取空间特征编码,公式如下:
[0108]
latent
sfn
=sfn
encoder
(s
input
)
[0109]
式中:latent
sfn
表示空间特征编码;
[0110]
s23.解码器网络对步骤s23提取的空间特征编码进行解码,公式如下:
[0111]osfn
=sfn
decoder
(latent
sfn
)
[0112]
式中:o
sfn
表示解码器网络输出的数据;
[0113]
s24.计算自编码器网络tsad
sfn
的输入s
input
与输出o
sfn
的重建误差,在步骤s5中作为损失函数的一部分,完成模型的训练,公式如下:
[0114][0115]
具体的,如图2所示,步骤s3融合得到卫星数据的时空动态特征,公式如下:
[0116]
latent
tsfn
=[latent
tfn
,latent
sfn
]
[0117]
式中:latent
tsfn
表示提取的卫星数据样本时空动态特征。
[0118]
具体的,如图2所示,步骤s4预测卫星数据在p帧后的值,具体为:
[0119]
s41.设计基于transformer的卫星数据预测网络tsad
predict
;
[0120]
s42.将步骤s3得到的时空动态特征latent
tsfn
输入卫星数据预测网络tsad
predict
,得到预测值,公式如下:
[0121]opredict
=tsad
predict
(latent
tsfn
)
[0122]
式中:o
predict
表示预测的p帧后数据。
[0123]
s43.计算预测网络输出o
predict
与p帧后实际值的距离,公式如下:
[0124][0125]
式中:y
p
表示p帧后的实际数据。
[0126]
具体的,如图2所示,步骤s5训练得到神经网络模型tsad的方法具体包括以下步骤:
[0127]
s51.神经网络tsad包括三个子网络,分别为tsad
tfn
、tsad
sfn
和tsad
predict
;
[0128]
s52.根据要进行故障检测的卫星设备,选取m个模拟量遥测参数;
[0129]
s53.选取卫星在正常运行工况下该m个遥测参数的连续l帧的数据作为训练集,表示为x
train
,公式如下:
[0130][0131]
式中:l表示训练集数据的帧数,xi,1≤i≤l表示第i帧的m维度数据;
[0132]
s54.利用“谱残差”方法剔除训练集合x
train
中的野值,得到新的x
train
;
[0133]
s55.计算训练集x
train
的均值μ
train
和标准差δ
train
,对x
train
中所有样本进行归一化处理,公式如下:
[0134][0135]
s56.设定滑动窗口宽度为k,滑动步长为s,在训练集x
train
上连续滑动得到新的训练集x
train
;
[0136]
s57.重复步骤至,输出与训练集x
train
相对应的验证集x
valid
,验证集x
valid
的样本数量为x
train
中样本数量的20%至30%;
[0137]
s58.根据步骤s15、s24、s43中得到的神经网络tsad
tfn
、tsad
sfn
和tsad
predict
的损失计算模型tsad的损失,公式如下:
[0138]
loss
tsad
=λ1loss
tfn
λ2loss
sfn
λ3loss
predict
[0139]
式中:loss
tsad
表示神经网络tsad的损失,λ1、λ2、λ3为超参数,分别表示神经网络tsad
tfn
、tsad
sfn
和tsad
predict
在总损失loss
tsad
中所占的权重比例;
[0140]
s59.以最小化步骤s56的损失loss
tsad
为目标,利用反向传播算法训练得到模型tsad。
[0141]
步骤s6计算训练集所有样本的故障得分的方法具体包括以下步骤:
[0142]
s61.以预测网络输出o
predict
与p帧后参数实际值的l2距离作为单个样本的故障得分;
[0143]
s62.遍历训练集的所有数据样本,计算得模型在训练集上的故障得分集合。
[0144]
具体的,如图2所示,步骤s8采用计算公式如下:
[0145][0146][0147][0148]
式中:tp表示正确分类为故障的样本数目,fp表示错误分类为故障的样本数目,tn表示被正确分类为正常的样本数目,fn表示被错误分类为正常的样本数目
[0149]
综上所述,本实施例所提供的一种基于时空动态特征融合的卫星故障检测方法,在通信/导航卫星遥测数据分析及故障检测中应用,通过利用卫星历史数据训练模型,实现了对载荷、控制、测控、供配电等分系统故障的检测,摆脱了对故障知识库的依赖。
[0150]
实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。