1.本技术属于人机交互医疗技术领域,具体涉及一种基于数字孪生的下肢康复外骨骼系统。
背景技术:
2.当今社会老龄化趋势不断加剧,偏瘫中风等神经疾病以及意外事故造成运动功能障碍严重影响了生活,运动损伤患者、骨骼肌肉系统损伤患者、骨科术后患者在治疗后需要通过运动疗法、手法治疗、物理因子治疗等方式促进组织修复、恢复运动功能、预防运动损伤。目前临床大多采用的辅助康复器械包括:手杖、矫形器、步行架和轮椅等。
3.近年来,出现了医疗康复机器人广泛应用于医疗康复领域。下肢康复外骨骼是穿戴于人体外侧并与人配合完成指定动作的机电一体化设备,采用仿生原理与患者肢体并联,模拟患者肢体的运动功能,辅助患者进行康复训练。下肢康复外骨骼可以减轻康复医师的负担,提高康复训练效率及效果,实时获取康复训练数据和评估训练效果。其功能主要包括:维持关节活动度、防止关节挛缩、纠正步态、重塑神经系统等。根据结构类型,下肢康复外骨骼可分为跑步机式和陆基式两种,患者可通过使用跑步机式康复医疗外骨骼在跑步机上获得行走康复训练,在这种类型的外骨骼中,为了保证安全,保持平衡,需要一套人体重量支撑系统,来减小重力对腿部的影响。陆基式外骨骼帮助患者在地面上行走,重获行走能力。按照应用类型,下肢康复医疗外骨骼可分为辅助行走和康复训练两类。
4.随着技术的不断发展,临床对于外骨骼的安全性、舒适性、病人生理个性化适应性等要求越来越高。目前,各类医疗康复外骨骼在人机一体化融合方面与临床应用及治疗质量等需求之间尚存在较大的技术差距。比如:外骨骼刚性结构使得外骨骼运动与人体运动不匹配;外骨骼康复训练步态与人体三维运动原始步态偏差;人体运动信息采集及多模信息融合技术的不足等等。
技术实现要素:
5.本技术的目的是提供一种基于数字孪生的下肢康复外骨骼系统,以克服现有技术的不足,实现个性化适应、穿戴安全舒适和高品质康复。
6.为了实现上述目的,本技术技术方案如下:
7.一种基于数字孪生的下肢康复外骨骼系统,所示基于数字孪生的下肢康复外骨骼系统,包括辅助患者下肢康复训练的下肢外骨骼物理实体,以及安装在所述下肢外骨骼物理实体上的运动姿态传感器,所述基于数字孪生的下肢康复外骨骼系统,还包括下肢外骨骼数字孪生模块、步态自适应模块、穿戴感知模块和数控模块,其中:
8.所述步态自适应模块,用于根据患者下肢的医学图像,获取患者下肢参数,通过人体标准步态曲线拟合得到患者的个性化步态轨迹曲线,并发送给下肢外骨骼数字孪生模块和数控模块;
9.所述下肢外骨骼数字孪生模块,设置有模拟下肢外骨骼物理实体的数字孪生体,
在接收到所述患者的个性化步态轨迹曲线后,模拟下肢外骨骼物理实体的运动;
10.所述穿戴感知模块,用于在接收到运动姿态传感器采集的运动姿态数据后,判断运动是否超出预设安全范围,如果超出预设安全范围,则反馈给步态自适应模块;
11.所述步态自适应模块,在接收到反馈后,按照预设规则调整患者的个性化步态轨迹曲线,然后发送给下肢外骨骼数字孪生模块和数控模块;
12.所述数控模块,用于在接收到运动姿态传感器采集的运动姿态数据后,将运动姿态传感器采集的运动姿态数据转发给穿戴感知模块,并在接收到患者的个性化步态轨迹曲线后,驱动所述下肢外骨骼物理实体的运动。
13.进一步的,所述穿戴感知模块在判断运动超出预设安全范围时,还通知数控模块调整下肢外骨骼物理实体缓慢复位。
14.进一步的,所述基于数字孪生的下肢康复外骨骼系统,还包括设备监测模块;
15.所述设备监测模块,接收运动姿态传感器采集的运动姿态数据,结合下肢外骨骼物理实体正常运行的参数范围,预测下肢外骨骼物理实体的运行状况及使用寿命。
16.进一步的,所述运动姿态传感器,包括设置在下肢外骨骼物理实体脚底测量患者压力的压力传感器、下肢关节处反馈下肢外骨骼物理实体的运行姿态的角度传感器、以及检测伺服电机运行状态的转速传感器。
17.进一步的,所述基于数字孪生的下肢康复外骨骼系统,还包括显示面板,用于显示数字孪生体和运动姿态传感器采集的运动姿态数据。
18.本技术提出的一种基于数字孪生的下肢康复外骨骼系统,克服目前医疗康复外骨骼在临床应用方面尚存在的不足,实现下肢外骨骼在临床医疗康复应用方面的人体生理结构的个性化适应、穿戴安全舒适和高品质康复等特点。
19.与现有技术相比,本技术的有益效果为:
20.1.采用主动式伺服电机和弹性、阻尼构件组成的混合半主动驱动方式,采用组合式连杆,结合转动副和移动副实现了三自由度机构的下肢髋、膝和踝关节;
21.2.实现下肢康复外骨骼物理实体与其数字孪生体交互融合及相互映射;能通过虚实交互系统对外骨骼设备进行可视化实时模拟;
22.3.结合数字孪生体与物理实体之间的相互映射,通过数字孪生体运动过程中的各个参数变化,实现患者步态轨迹自适应调整,穿戴舒适性、安全性调整及设备的预测性维护等个性化服务;
23.4.对传感器数量进行了精简,使用与物理实体相映射的数字孪生体处运动采集数据代替真实传感器,系统成本较低且保障患者的安全性。
附图说明
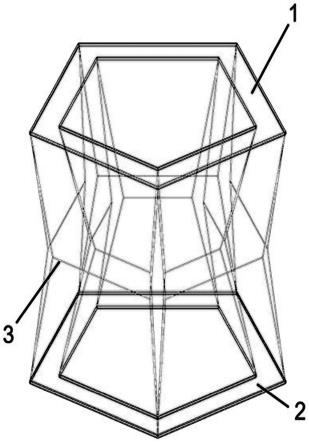
24.图1为下肢外骨骼物理实体的一种实施例;
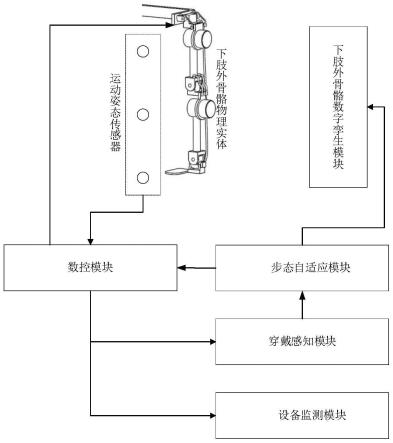
25.图2为本技术基于数字孪生的下肢康复外骨骼系统框架结构图。
具体实施方式
26.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅用以解释本技术,并不用
于限定本技术。
27.如图1所示,下肢外骨骼物理实体(简称为外骨骼)为下肢康复外骨骼整体的机械结构,是本技术关注与操作的对象。在应用中,通过与患者下肢连接的各种绑带将下肢外骨骼物理实体与人体下肢固定紧实不易脱落,且穿戴舒适。下肢外骨骼物理实体包括髋关节、膝关节和踝关节,以及关节间连杆,若干连杆以及相关传动结构建立关节之间的连接和传动关系。
28.所述下肢外骨骼物理实体采用主动式伺服电机3和外侧鲍登线2及内侧鲍登线5组成的混合半主动驱动方式,组合式下肢连杆结合转动副和移动副实现三自由度机构的下肢髋关节1、膝关节4和踝关节6。所述髋关节1采用转动副与移动副实现髋关节多个自由度的运动;所述外侧鲍登线2用于额状面运动的辅助驱动及安全保障,当向额状面外侧运动时,外侧鲍登线2收缩带动外外骨骼前进,当到达最大范围时,外侧鲍登线2拉到最大值,防止进一步前进,同时,在外骨骼复位时,外侧鲍登线2的缓慢收放起到了安全保障的作用;所述伺服电机3用于驱动外骨骼髋关节与膝关节运动;所述膝关节4采用转动副与旋转副实现髋关节多个自由度的运动;内测鲍登线5与关节旋转处连接,用于伺服电机驱动关节旋转时辅助关节运动及复位时限制外骨骼返回速度;所述踝关节6处采用双转动副,实现踝关节处多自由度的运动。
29.在一个实施例中,如图2所示,提出了一种基于数字孪生的下肢康复外骨骼系统,所示基于数字孪生的下肢康复外骨骼系统,包括辅助患者下肢康复训练的下肢外骨骼物理实体,以及安装在所述下肢外骨骼物理实体上的运动姿态传感器,所述基于数字孪生的下肢康复外骨骼系统,还包括下肢外骨骼数字孪生模块、步态自适应模块、穿戴感知模块和数控模块,其中:
30.所述步态自适应模块,用于根据患者下肢的医学图像,获取患者下肢参数,通过人体标准步态曲线拟合得到患者的个性化步态轨迹曲线,并发送给下肢外骨骼数字孪生模块和数控模块;
31.所述下肢外骨骼数字孪生模块,设置有模拟下肢外骨骼物理实体的数字孪生体,在接收到所述患者的个性化步态轨迹曲线后,模拟下肢外骨骼物理实体的运动;
32.所述穿戴感知模块,用于在接收到运动姿态传感器采集的运动姿态数据后,判断运动是否超出预设安全范围,如果超出预设安全范围,则反馈给步态自适应模块;
33.所述步态自适应模块,在接收到反馈后,按照预设规则调整患者的个性化步态轨迹曲线,然后发送给下肢外骨骼数字孪生模块和数控模块。
34.所述数控模块,用于在接收到运动姿态传感器采集的运动姿态数据后,将运动姿态传感器采集的运动姿态数据转发给穿戴感知模块,并在接收到患者的个性化步态轨迹曲线后,驱动所述下肢外骨骼物理实体的运动。
35.在本实施例中,如图2所示,运动姿态传感器安装在所述下肢外骨骼物理实体上,其采集下肢外骨骼物理实体的运动姿态数据。步态自适应模块,根据患者下肢的医学图像,获取患者下肢参数,通过人体标准步态曲线拟合得到患者的个性化步态轨迹曲线。
36.具体的,运动姿态传感器包括设置在下肢外骨骼物理实体脚底测量患者压力的压力传感器、下肢关节处反馈下肢外骨骼物理实体的运行姿态的角度传感器、以及检测伺服电机运行状态的转速传感器。所采集的运动姿态数据通过数控模块转发给穿戴感知模块。
37.步态自适应模块,获取患者下肢ct图像,从患者下肢ct图像中获得患者下肢参数,例如下肢各个关节距离。然后将关节距离参数输入至人体标准步态曲线,拟合得到患者的个性化步态轨迹曲线。步态轨迹曲线可以包括髋关节角度变换曲线和膝关节角度变换曲线。
38.例如,角度变换曲线用函数表示为:
39.θ=ld*(77*sin(0.64*time 0.4226) 25.45*sin(1.965*time-2) 4.9*sin(4.014*time-2.1)));
40.其中,time表示时间,角度θ随时间变化,ld表示关节距离。
41.需要说明的是,函数中的各个数值是人体标准步态曲线所对应的各个参数,对于不同的关节,不同的左右腿,对应有不同的曲线函数,这里不再赘述。步态自适应模块在得到患者的个性化步态轨迹曲线后,将其发送给下肢外骨骼数字孪生模块和数控模块。
42.下肢外骨骼数字孪生模块,设置有模拟下肢外骨骼物理实体的数字孪生体,在接收到所述患者的个性化步态轨迹曲线后,模拟下肢外骨骼物理实体的运动。
43.具体的,下肢外骨骼数字孪生模块,是通过下肢外骨骼形状、大小、尺寸等几何信息建立的三维模型,并从运动学角度构建外骨骼各个关节连接处的运动范围、约束条件以及运动关系,所得到的符合运动学条件的可视化三维模型。下肢外骨骼数字孪生模块对下肢外骨骼物理实体进行可视化实时模拟,实时反映下肢外骨骼物理实体的运行情况,发生故障时方便观察故障部件的位置和原因。
44.数控模块在接收到患者的个性化步态轨迹曲线后,可以根据个性化步态轨迹曲线去控制下肢外骨骼物理实体的运动,主要是驱动下肢外骨骼物理实体上的伺服电机,带动下肢外骨骼物理实体运动。
45.穿戴感知模块,在接收到运动姿态传感器采集的运动姿态数据后,判断运动是否超出预设安全范围,如果超出预设安全范围,则反馈给步态自适应模块。
46.本实施例穿戴感知模块根据患者下肢关节的三维模型分析获得患者下肢的关节活动角度范围,同时结合医学数据库中人体下肢关节承受压力范围,建立患者姿态舒适度的评估数据库并将其通过数控面板实现可视化,实现医护人员通过可视化面板监测患者穿戴的舒适情况。同时还设定人体下肢关节承受压力的安全范围,在接收到运动姿态数据后,判断运动是否超出预设安全范围,如果超出预设安全范围,则反馈给步态自适应模块。
47.步态自适应模块,在接收到反馈后,按照预设规则调整患者的个性化步态轨迹曲线,然后发送给下肢外骨骼数字孪生模块和数控模块。本实施例按照预设规则调整患者的个性化步态轨迹曲线,可以修改患者下肢参数,例如是原患者下肢参数的0.95,或1.05,通过上下调整来调节患者的个性化步态轨迹曲线,从而达到自适应调整的目的。
48.例如,穿戴感知模块接收到运动姿态传感器中角度传感器采集的角度信息,通过两次求导得到加速度a,然后通过如下公式计算各关节处力矩大小:
49.t=f*l=m*a*l
50.其中,t是计算得到的关节处力矩,m表示质量,髋关节力矩是大腿组件加小腿组建质量和,膝关节力矩是小腿组件质量。a为加速度,通过对角度信息两次求导得到。
51.通常健康状况下髋关节可以承载体体重的3-4倍,膝关节可以承载体体重的5-6倍。本实施例穿戴感知模块可以设置如下判断标准,例如,安全范围设定为关节处力矩超出
1.5倍人体体重的压力值,则认为超出安全范围。而如果处于0-1倍人体体重,则认为是处于舒适范围。
52.在实际的应用中,如果超过舒适值且时间大于一个步态周期(角度曲线的变化周期,一般为5s)发送复位信号,通过数控模块实现下肢外骨骼物理实体/数字孪生体复位。而一旦超过安全范围,则发送停止信号,通过数控模块实现下肢外骨骼物理实体/数字孪生体停止运行。
53.需要说明的是,本实施例仅列举了关节处力矩的计算和判断方法,本领域技术人员应该清楚的是,在外骨骼进行其他运动时所需判定时也可进行压力等传感数据的换算,这里不再赘述。
54.在一个具体的实施例中,本技术基于数字孪生的下肢康复外骨骼系统,还包括显示面板,用于显示数字孪生体和运动姿态传感器采集的运动姿态数据。
55.通过显示面板及时显示数字孪生体和运动姿态传感器采集的运动姿态数据,以便于医护人员及时返现问题进行处理,便于进行维护和调整。
56.在另一个实施例中,穿戴感知模块在判断运动超出预设安全范围时,还通知数控模块,数控模块调整下肢外骨骼物理实体缓慢复位,保障患者穿戴安全。
57.在另一个实施例中,本技术基于数字孪生的下肢康复外骨骼系统,还包括设备监测模块,接收运动姿态传感器采集的运动姿态数据,结合下肢外骨骼物理实体正常运行的参数范围,预测下肢外骨骼物理实体的运行状况及使用寿命。
58.具体的,设备监测模块,接收转速传感器采集的伺服电机的转速,结合伺服电机设备正常运行的参数范围,预测设备的运行状况及使用寿命,实现对下肢外骨骼物理实体运行情况的实时监测及预测性维护。
59.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。