技术特征:
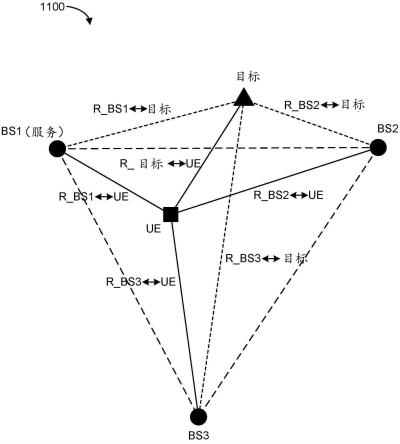
1.一种由用户设备(ue)执行的无线感测方法,包括:至少测量来自第一发送接收点(trp)的第一下行链路定位参考信号(dl-prs)的视距(los)路径和非视距(nlos)路径;至少测量来自第二trp的第二dl-prs的los路径和nlos路径;至少测量来自第三trp的第三dl-prs的los路径和nlos路径;以及使得能够至少部分地基于所述第一dl-prs的所述los路径的到达时间(toa)与所述第一dl-prs的所述nlos路径的toa之间的第一参考信号时间差(rstd)、所述第一dl-prs的所述los路径的所述toa与所述第二dl-prs的所述nlos路径的toa之间的第二rstd、以及所述第一dl-prs的所述los路径的所述toa与所述第三dl-prs的所述nlos路径的toa之间的第三rstd来确定非参与目标对象的位置,其中所述非参与目标对象不参与确定所述非参与目标对象的所述位置。2.根据权利要求1所述的方法,其中使得能够确定所述非参与目标对象的位置包括:向位置服务器报告至少所述第一rstd、所述第二rstd和所述第三rstd。3.根据权利要求1所述的方法,其中:确定所述非参与目标对象的所述位置在第一椭圆、第二椭圆和第三椭圆的交点处,所述第一椭圆的第一焦点和第二焦点对应于所述第一trp的位置和所述ue的位置,所述第二椭圆的第一焦点和第二焦点对应于所述第二trp的位置和所述ue的位置,并且所述第三椭圆的第一焦点和第二焦点对应于所述第三trp的位置和所述ue的位置。4.根据权利要求3所述的方法,其中:所述第一椭圆是基于所述第一trp与所述非参与目标对象之间的距离、所述ue与所述非参与目标对象之间的距离、所述第一trp的位置以及所述ue的位置确定的,所述第二椭圆是基于所述第二trp与所述非参与目标对象之间的距离、所述ue与所述非参与目标对象之间的距离、所述第二trp的位置以及所述ue的位置确定的,并且所述第三椭圆是基于所述第三trp与所述非参与目标对象之间的距离、所述ue与所述非参与目标对象之间的距离、所述第三trp的位置以及所述ue的位置确定的。5.根据权利要求4所述的方法,其中:所述第一trp与所述非参与目标对象之间的距离加上所述ue与所述非参与目标对象之间的距离是基于所述第一rstd确定的,所述第二trp与所述非参与目标对象之间的距离加上所述ue与所述非参与目标对象之间的距离是基于所述第二rstd确定的,并且所述第三trp与所述非参与目标对象之间的距离加上所述ue与所述非参与目标对象之间的距离是基于所述第三rstd确定的。6.根据权利要求3所述的方法,其中:所述ue的所述位置是基于所述第一dl-prs的所述los路径的所述toa与所述第二dl-prs的所述los路径的toa之间的rstd以及所述第一dl-prs的所述los路径的所述toa与所述第三dl-prs的所述los路径的toa之间的rstd来确定的。7.根据权利要求1所述的方法,其中使得能够确定所述非参与目标对象的位置包括:至少向位置服务器报告所述第二rstd与所述第一rstd之间的差值以及所述第三rstd
与所述第一rstd之间的差值。8.根据权利要求1所述的方法,其中:所述非参与目标对象的所述位置被确定为在第一双曲线、第二双曲线和第三双曲线的交点处,所述第一双曲线的焦点是所述第一trp的位置,所述第二双曲线的焦点是所述第二trp的位置,并且所述第三双曲线的焦点是所述第三trp的位置。9.根据权利要求8所述的方法,其中:所述第一双曲线是基于所述第二trp与所述非参与目标对象之间的距离以及所述第一trp与所述非参与目标对象之间的距离之间的差值、所述第一trp的位置以及所述第二trp的位置确定的,所述第二双曲线是基于所述第三trp与所述非参与目标对象之间的距离以及所述第一trp与所述非参与目标对象之间的距离之间的差值、所述第一trp的位置以及所述第三trp的位置确定的,并且所述第三双曲线是基于所述第二trp与所述非参与目标对象之间的距离以及所述第三trp与所述非参与目标对象之间的距离之间的差值、所述第二trp的位置以及所述第三trp的位置确定的。10.根据权利要求9所述的方法,其中:所述第二trp与所述非参与目标对象之间的距离以及所述第一trp与所述非参与目标对象之间的距离之间的差值、所述第三trp与所述非参与目标对象之间的距离以及第一trp与所述非参与目标对象之间的距离之间的差值、以及所述第二trp与所述非参与目标对象之间的距离以及所述第三trp与所述非参与目标对象之间的距离之间的差值是基于所述第二rstd与所述第一rstd之间的差值以及所述第三rstd与所述第一rstd之间的差值来确定的。11.根据权利要求1所述的方法,进一步包括:向位置服务器至少报告所述第一dl-prs的所述los路径的所述toa与所述第二dl-prs的所述los路径的toa之间的rstd、以及所述第一dl-prs的所述los路径的所述toa与所述第三dl-prs的所述los路径的toa之间的rstd,以使所述位置服务器能够确定所述ue的位置。12.根据权利要求1所述的方法,其中使得能够确定所述非参与目标对象的位置包括:基于所述第一dl-prs的所述los路径的所述toa与所述第一dl-prs的所述nlos路径的所述toa之间的所述第一rstd、所述第一dl-prs的所述los路径的所述toa与所述第二dl-prs的所述nlos路径的所述toa之间的所述第二rstd、以及所述第一dl-prs的所述los路径的所述toa与所述第三dl-prs的所述nlos路径的所述toa之间的所述第三rstd来确定所述非参与目标对象的位置。13.根据权利要求12所述的方法,进一步包括:接收所述第一trp的位置、所述第二trp的位置和所述第三trp的位置,其中确定所述非参与目标对象的位置进一步基于所述第一trp的位置、所述第二trp的位置和所述第三trp的位置。14.一种用户设备(ue),包括:存储器;
至少一个收发器;以及至少一个处理器,所述至少一个处理器以通信方式耦合到所述存储器和所述至少一个收发器,所述至少一个处理器被配置成:至少测量来自第一发送接收点(trp)的第一下行链路定位参考信号(dl-prs)的视距(los)路径和非视距(nlos)路径;至少测量来自第二trp的第二dl-prs的los路径和nlos路径;至少测量来自第三trp的第三dl-prs的los路径和nlos路径;以及使得能够至少部分地基于所述第一dl-prs的所述los路径的到达时间(toa)与所述第一dl-prs的所述nlos路径的toa之间的第一参考信号时间差(rstd)、所述第一dl-prs的所述los路径的所述toa与所述第二dl-prs的所述nlos路径的toa之间的第二rstd、以及所述第一dl-prs的所述los路径的所述toa与所述第三dl-prs的所述nlos路径的toa之间的第三rstd来确定非参与目标对象的位置,其中所述非参与目标对象不参与确定所述非参与目标对象的所述位置。15.根据权利要求14所述的ue,其中,被配置成使得能够确定所述非参与目标对象的位置的所述至少一个处理器包括被配置成执行以下操作的至少一个处理器:向位置服务器报告至少所述第一rstd、所述第二rstd和所述第三rstd。16.根据权利要求14所述的ue,其中:确定所述非参与目标对象的所述位置在第一椭圆、第二椭圆和第三椭圆的交点处,所述第一椭圆的第一焦点和第二焦点对应于所述第一trp的位置和所述ue的位置,所述第二椭圆的第一焦点和第二焦点对应于所述第二trp的位置和所述ue的位置,并且所述第三椭圆的第一焦点和第二焦点对应于所述第三trp的位置和所述ue的位置。17.根据权利要求16所述的ue,其中:所述第一椭圆是基于所述第一trp与所述非参与目标对象之间的距离、所述ue与所述非参与目标对象之间的距离、所述第一trp的位置以及所述ue的位置确定的,所述第二椭圆是基于所述第二trp与所述非参与目标对象之间的距离、所述ue与所述非参与目标对象之间的距离、所述第二trp的位置以及所述ue的位置确定的,并且所述第三椭圆是基于所述第三trp与所述非参与目标对象之间的距离、所述ue与所述非参与目标对象之间的距离、所述第三trp的位置以及所述ue的位置确定的。18.根据权利要求17所述的ue,其中:所述第一trp与所述非参与目标对象之间的距离加上所述ue与所述非参与目标对象之间的距离是基于所述第一rstd确定的,所述第二trp与所述非参与目标对象之间的距离加上所述ue与所述非参与目标对象之间的距离是基于所述第二rstd确定的,并且所述第三trp与所述非参与目标对象之间的距离加上所述ue与所述非参与目标对象之间的距离是基于所述第三rstd确定的。19.根据权利要求16所述的ue,其中所述ue的所述位置是基于所述第一dl-prs的所述los路径的所述toa与所述第二dl-prs的所述los路径的toa之间的rstd、以及所述第一dl-prs的所述los路径的所述toa与所述第三dl-prs的所述los路径的toa之间的rstd来确定
的。20.根据权利要求14所述的ue,其中,被配置成使得能够确定所述非参与目标对象的位置的所述至少一个处理器包括被配置成执行以下操作的至少一个处理器:至少向位置服务器报告所述第二rstd与所述第一rstd之间的差值以及所述第三rstd与所述第一rstd之间的差值。21.根据权利要求14所述的ue,其中:所述非参与目标对象的所述位置被确定为在第一双曲线、第二双曲线和第三双曲线的交点处,所述第一双曲线的焦点是所述第一trp的位置,所述第二双曲线的焦点是所述第二trp的位置,并且所述第三双曲线的焦点是所述第三trp的位置。22.根据权利要求21所述的ue,其中:所述第一双曲线是基于所述第二trp与所述非参与目标对象之间的距离以及所述第一trp与所述非参与目标对象之间的距离之间的差值、所述第一trp的位置以及所述第二trp的位置确定的,所述第二双曲线是基于所述第三trp与所述非参与目标对象之间的距离以及所述第一trp与所述非参与目标对象之间的距离之间的差值、所述第一trp的位置以及所述第三trp的位置确定的,并且所述第三双曲线是基于所述第二trp与所述非参与目标对象之间的距离以及所述第三trp与所述非参与目标对象之间的距离之间的差值、所述第二trp的位置以及所述第三trp的位置确定的。23.根据权利要求所述22的ue,其中:所述第二trp与所述非参与目标对象之间的距离以及所述第一trp与所述非参与目标对象之间的距离之间的差值、所述第三trp与所述非参与目标对象之间的距离以及第一trp与所述非参与目标对象之间的距离之间的差值、以及所述第二trp与所述非参与目标对象之间的距离以及所述第三trp与所述非参与目标对象之间的距离之间的差值是基于所述第二rstd与所述第一rstd之间的差值以及所述第三rstd与所述第一rstd之间的差值来确定的。24.根据权利要求14所述的ue,其中所述一个处理器还被配置成:向位置服务器至少报告所述第一dl-prs的所述los路径的所述toa与所述第二dl-prs的所述los路径的toa之间的rstd、以及所述第一dl-prs的所述los路径的所述toa与所述第三dl-prs的所述los路径的toa之间的rstd,以使所述位置服务器能够确定所述ue的位置。25.根据权利要求14所述的ue,其中,被配置成使得能够确定所述非参与目标对象的位置的所述至少一个处理器包括被配置成执行以下操作的至少一个处理器:基于所述第一dl-prs的所述los路径的所述toa与所述第一dl-prs的所述nlos路径的所述toa之间的所述第一rstd、所述第一dl-prs的所述los路径的所述toa与所述第二dl-prs的所述nlos路径的所述toa之间的所述第二rstd、以及所述第一dl-prs的所述los路径的所述toa与所述第三dl-prs的所述nlos路径的所述toa之间的所述第三rstd来确定所述非参与目标对象的位置。26.根据权利要求25所述的ue,其中所述一个处理器还被配置成:
经由所述至少一个收发器接收所述第一trp的位置、所述第二trp的位置和所述第三trp的位置,其中确定所述非参与目标对象的位置进一步基于所述第一trp的位置、所述第二trp的位置和所述第三trp的位置。27.一种用户设备(ue),包括:用于至少测量来自第一发送接收点(trp)的第一下行链路定位参考信号(dl-prs)的视距(los)路径和非视距(nlos)路径的部件;用于至少测量来自第二trp的第二dl-prs的los路径和nlos路径的部件;用于至少测量来自第三trp的第三dl-prs的los路径和nlos路径的部件;以及用于使得能够至少部分地基于所述第一dl-prs的所述los路径的到达时间(toa)与所述第一dl-prs的所述nlos路径的toa之间的第一参考信号时间差(rstd)、所述第一dl-prs的所述los路径的所述toa与所述第二dl-prs的所述nlos路径的toa之间的第二rstd,以及所述第一dl-prs的所述los路径的所述toa与所述第三dl-prs的所述nlos路径的toa之间的第三rstd来确定非参与目标对象的位置的部件,其中所述非参与目标对象不参与确定所述非参与目标对象的所述位置。28.根据权利要求27所述的ue,其中:确定所述非参与目标对象的所述位置在第一椭圆、第二椭圆和第三椭圆的交点处,所述第一椭圆的第一焦点和第二焦点对应于所述第一trp的位置和所述ue的位置,所述第二椭圆的第一焦点和第二焦点对应于所述第二trp的位置和所述ue的位置,并且所述第三椭圆的第一焦点和第二焦点对应于所述第三trp的位置和所述ue的位置。29.根据权利要求27所述的ue,其中:所述非参与目标对象的所述位置被确定为在第一双曲线、第二双曲线和第三双曲线的交点处,所述第一双曲线的焦点是所述第一trp的位置,所述第二双曲线的焦点是所述第二trp的位置,并且所述第三双曲线的焦点是所述第三trp的位置。30.一种存储计算机可执行指令的非暂态计算机可读介质,其中所述计算机可执行指令当被用户设备(ue)执行时,使所述ue:至少测量来自第一发送接收点(trp)的第一下行链路定位参考信号(dl-prs)的视距(los)路径和非视距(nlos)路径;至少测量来自第二trp的第二dl-prs的los路径和nlos路径;至少测量来自第三trp的第三dl-prs的los路径和nlos路径;以及使得能够至少部分地基于所述第一dl-prs的所述los路径的到达时间(toa)与所述第一dl-prs的所述nlos路径的toa之间的第一参考信号时间差(rstd)、所述第一dl-prs的所述los路径的所述toa与所述第二dl-prs的所述nlos路径的toa之间的第二rstd、以及所述第一dl-prs的所述los路径的所述toa与所述第三dl-prs的所述nlos路径的toa之间的第三rstd来确定非参与目标对象的位置,其中所述非参与目标对象不参与确定所述非参与目标对象的所述位置。
技术总结
本文公开了用于无线感测的技术。在一个方面中,一种用户设备(UE)至少测量来自第一发送接收点(TRP)的第一下行链路定位参考信号(DL-PRS)的视距(LOS)路径和非视距(NLOS)路径,至少测量来自第二TRP的第二DL-PRS的LOS路径和NLOS路径,至少测量来自第三TRP的第三DL-PRS的LOS路径和NLOS路径,并且至少部分基于所述第一DL-PRS的所述LOS路径的到达时间(ToA)与所述第一、第二和第三DL-PRS的NLOS路径的ToA之间的参考信号时间差(RSTD)测量值来确定非参与目标对象的位置。在一个方面中,所述非参与目标对象不参与确定其自身的位置。与目标对象不参与确定其自身的位置。与目标对象不参与确定其自身的位置。
技术研发人员:S.朴 W.南 骆涛 J.李 J.蒙托霍 J.孙 张晓霞 P.加尔 T.俞 S.默林
受保护的技术使用者:高通股份有限公司
技术研发日:2021.06.10
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。