1.本发明涉及红外成像技术领域,具体地,涉及基于体绘制的空中目标尾焰红外成像方法、系统、介质及设备,主要应用于空中目标尾焰的红外辐射特性计算与红外图像仿真,可生成不同波段下固定角度和距离的单幅图像,也可生成不同观测视角和观测距离的序列图像。
背景技术:
2.空中目标的红外辐射源主要包括蒙皮、发动机尾喷口、尾焰等,其中,尾焰由于发动机燃烧产生的大量高温高速燃烧产物,其会向外发出强烈的红外辐射,因此尾焰是研究空中目标红外特性的重点,其红外图像仿真也成为空中目标红外特性研究的重要组成部分。为生成尾焰的红外图像,需要计算尾焰内部介质对红外辐射在视线方向上的吸收、发射以及透射,得到尾焰的红外辐亮度分布。目前常用的计算尾焰辐射传输方法有热流法、蒙特卡洛法以及有限体积法等。以上方法相对成熟,但在仿真逼真度以及计算时间方面均存在一定的优缺点。
3.体绘制作为一种由三维标量数据场产生二维图像的技术,其基本思想是通过采样方式计算三维数据场每个体素对屏幕像素的贡献,得到像素的光强度值。体绘制技术核心在于可以快速逼真地展现数据场的全貌以及内部的细节和结构,通常用于描述肌肉、骨骼、云、以及烟雾等物体的可视化。自上个世纪80年代以来,国内外对体绘制技术进行了研究,并将体绘制运用到医疗领域,随着技术的发展,体绘制技术在地质、海洋、气象以及电磁场等领域也得到了广泛应用。尾焰的红外辐射计算不同于固体壁面,其红外辐射受内部介质的影响,尾焰红外图像的生成同样需要确定尾焰内部的介质对其辐射能量的贡献。因此可针对尾焰红外辐射特性计算的特点,基于体绘制技术的基本思想,研究一种新的尾焰红外数据可视化过程,实现不同波段下尾焰红外图像的生成。
4.专利文献cn106599400a(申请号:201611062911.2)公开了一种飞行器尾焰红外辐射快速计算及动态仿真方法,包括以下步骤:步骤一:建立飞行器发动机标准化模型,并获取飞行器发动机的内流场参数;步骤二:将步骤一中获得的内流场参数输入至fluent软件中,并利用fluent软件获取飞行器高温尾焰温度场分布数据;步骤三:通过步骤二所得出的高温尾焰温度场分布数据,利用cg谱线法计算获取高温尾焰层光谱透射率和层光谱辐射亮度;步骤四:将步骤三中所获得的高温尾焰层光谱透过率和层光谱辐射亮度赋予osg粒子系统,并通过osg粒子系统实现飞行器尾焰高动态实时仿真。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供基于体绘制的空中目标尾焰红外成像方法、系统、介质及设备
6.根据本发明提供的一种基于体绘制的空中目标尾焰红外成像方法,包括:
7.步骤s1:建立体绘制所需的空中目标尾焰三维数据场;
8.步骤s2:传感器和目标尾焰六自由度数据的坐标系转换;
9.步骤s3:基于体绘制技术的光线投射算法生成尾焰红外图像。
10.优选地,所述步骤s1采用:
11.步骤s1.1:计算空中目标尾焰的二维流场;
12.步骤s1.2:将二维流场转化为数据结构规则的结构化网格;
13.步骤s1.3:基于结构化网格插值求解得到尾焰的三维流场以及红外特性参数;
14.步骤s1.4:根据红外特性参数计算得到光谱辐亮度和透过率;
15.步骤s1.5:以光谱辐亮度和透过率作为体素的物理特性构建空中目标尾焰三维数据场。
16.优选地,所述步骤s2采用:
17.步骤s2.1:根据轨迹数据得到传感器和目标尾焰的空间信息,根据传感器和目标尾焰的空间信息确定地面坐标系与目标坐标系的变换矩阵;
18.步骤s2.2:基于地面坐标系与目标坐标系的变换矩阵,计算得到传感器每个时刻在目标坐标系下的坐标、对应的俯仰/方位角以及距离。
19.优选地,所述步骤s3采用:
20.步骤s3.1:根据传感器每个时刻在目标坐标系下的坐标、对应的俯仰/方位角以及距离确定光线方向;
21.步骤s3.2:沿着光线方向对尾焰体数据进行采样;
22.步骤s3.3:确定采样点的光谱辐亮度和透过率,计算成像面每个像素点的能量值;
23.步骤s3.4:根据成像面每个像素点的能量值得到空中目标尾焰红外成像。
24.根据本发明提供的一种基于体绘制的空中目标尾焰红外成像系统,包括:
25.模块m1:建立体绘制所需的空中目标尾焰三维数据场;
26.模块m2:传感器和目标尾焰六自由度数据的坐标系转换;
27.模块m3:基于体绘制技术的光线投射算法生成尾焰红外图像。
28.优选地,所述模块m1采用:
29.模块m1.1:计算空中目标尾焰的二维流场;
30.模块m1.2:将二维流场转化为数据结构规则的结构化网格;
31.模块m1.3:基于结构化网格插值求解得到尾焰的三维流场以及红外特性参数;
32.模块m1.4:根据红外特性参数计算得到光谱辐亮度和透过率;
33.模块m1.5:以光谱辐亮度和透过率作为体素的物理特性构建空中目标尾焰三维数据场。
34.优选地,所述模块m2采用:
35.模块m2.1:根据轨迹数据得到传感器和目标尾焰的空间信息,根据传感器和目标尾焰的空间信息确定地面坐标系与目标坐标系的变换矩阵;
36.模块m2.2:基于地面坐标系与目标坐标系的变换矩阵,计算得到传感器每个时刻在目标坐标系下的坐标、对应的俯仰/方位角以及距离。
37.优选地,所述模块m3采用:
38.模块m3.1:根据传感器每个时刻在目标坐标系下的坐标、对应的俯仰/方位角以及距离确定光线方向;
39.模块m3.2:沿着光线方向对尾焰体数据进行采样;
40.模块m3.3:确定采样点的光谱辐亮度和透过率,计算成像面每个像素点的能量值;
41.模块m3.4:根据成像面每个像素点的能量值得到空中目标尾焰红外成像。
42.根据本发明提供的一种存储有计算机程序的计算机可读存储介质,所述计算机程序被处理器执行时实现上述所述的方法的步骤。
43.根据本发明提供的一种基于体绘制的空中目标尾焰红外成像设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述计算机程序被处理器执行时实现上述所述的基于体绘制的空中目标尾焰红外成像方法的步骤。
44.与现有技术相比,本发明具有如下的有益效果:
45.1、本发明可快速逼真地生成空中目标尾焰的红外图像数据,用于空中目标红外辐射特性分析,辅助完成红外探测设备的半实物仿真实验,为红外探测设备性能设计优化提供支撑;
46.2、本发明主要应用于空中目标的红外目标特性分析以及武器领域的半实物仿真试验,可为半实物仿真试验的目标模拟系统提供空中目标特性数据,优化红外探测设备的图像算法。
附图说明
47.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
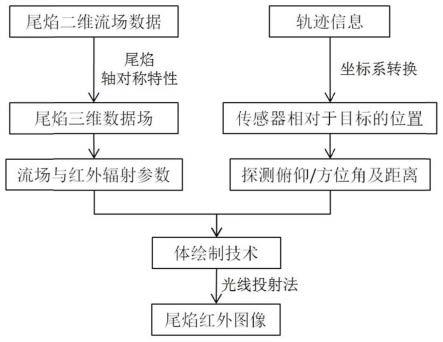
48.图1是基于体绘制的空中目标尾焰红外图像生成方法流程图。
49.图2是二维流场构建三维数据场示意图。
50.图3是目标坐标系与地面坐标系的相对关系示意图。
51.图4是基于体绘制的尾焰红外成像示意图。
具体实施方式
52.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
53.实施例1
54.飞行器通过其配备的传感器探测目标尾焰的红外辐射,如实地显示出目标红外图像,并对目标图像进行捕获和跟踪,引导飞行器攻击目标。本发明针对目前空中目标尾焰红外图像生成存在尾焰三维流场计算量大、数据结构复杂以及图像生成计算耗时等问题,提出一种基于体绘制的空中目标尾焰红外图像生成方法。该方法基于尾焰的二维流场结构化数据,构建出尾焰的三维体数据,并计算出每个体素的红外特性参数,利用轨迹信息确定探测器相对于目标的位置,采用体绘制技术中的光线投射法,计算每个像素的辐亮度,实现尾焰红外图像的生成。
55.根据本发明提供的一种基于体绘制的空中目标尾焰红外成像方法,包括:
56.步骤s1:建立体绘制所需的空中目标尾焰三维数据场;
57.步骤s2:传感器和目标尾焰六自由度数据的坐标系转换;
58.步骤s3:基于体绘制技术的光线投射算法生成尾焰红外图像。
59.具体地,所述步骤s1采用:
60.步骤s1.1:计算空中目标尾焰的二维流场;
61.步骤s1.2:将二维流场转化为数据结构规则的结构化网格;
62.步骤s1.3:基于结构化网格插值求解得到尾焰的三维流场以及红外特性参数;
63.步骤s1.4:根据红外特性参数计算得到光谱辐亮度和透过率;
64.步骤s1.5:以光谱辐亮度和透过率作为体素的物理特性构建空中目标尾焰三维数据场。
65.具体地,所述步骤s2采用:
66.步骤s2.1:根据轨迹数据得到传感器和目标尾焰的空间信息,根据传感器和目标尾焰的空间信息确定地面坐标系与目标坐标系的变换矩阵;
67.步骤s2.2:基于地面坐标系与目标坐标系的变换矩阵,计算得到传感器每个时刻在目标坐标系下的坐标、对应的俯仰/方位角以及距离。
68.具体地,所述步骤s3采用:
69.步骤s3.1:根据传感器每个时刻在目标坐标系下的坐标、对应的俯仰/方位角以及距离确定光线方向;
70.步骤s3.2:沿着光线方向对尾焰体数据进行采样;
71.步骤s3.3:确定采样点的光谱辐亮度和透过率,计算成像面每个像素点的能量值;
72.步骤s3.4:根据成像面每个像素点的能量值得到空中目标尾焰红外成像。
73.根据本发明提供的一种基于体绘制的空中目标尾焰红外成像系统,包括:
74.模块m1:建立体绘制所需的空中目标尾焰三维数据场;
75.模块m2:传感器和目标尾焰六自由度数据的坐标系转换;
76.模块m3:基于体绘制技术的光线投射算法生成尾焰红外图像。
77.具体地,所述模块m1采用:
78.模块m1.1:计算空中目标尾焰的二维流场;
79.模块m1.2:将二维流场转化为数据结构规则的结构化网格;
80.模块m1.3:基于结构化网格插值求解得到尾焰的三维流场以及红外特性参数;
81.模块m1.4:根据红外特性参数计算得到光谱辐亮度和透过率;
82.模块m1.5:以光谱辐亮度和透过率作为体素的物理特性构建空中目标尾焰三维数据场。
83.具体地,所述模块m2采用:
84.模块m2.1:根据轨迹数据得到传感器和目标尾焰的空间信息,根据传感器和目标尾焰的空间信息确定地面坐标系与目标坐标系的变换矩阵;
85.模块m2.2:基于地面坐标系与目标坐标系的变换矩阵,计算得到传感器每个时刻在目标坐标系下的坐标、对应的俯仰/方位角以及距离。
86.具体地,所述模块m3采用:
87.模块m3.1:根据传感器每个时刻在目标坐标系下的坐标、对应的俯仰/方位角以及
距离确定光线方向;
88.模块m3.2:沿着光线方向对尾焰体数据进行采样;
89.模块m3.3:确定采样点的光谱辐亮度和透过率,计算成像面每个像素点的能量值;
90.模块m3.4:根据成像面每个像素点的能量值得到空中目标尾焰红外成像。
91.根据本发明提供的一种存储有计算机程序的计算机可读存储介质,所述计算机程序被处理器执行时实现上述所述的方法的步骤。
92.根据本发明提供的一种基于体绘制的空中目标尾焰红外成像设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述计算机程序被处理器执行时实现上述所述的基于体绘制的空中目标尾焰红外成像方法的步骤。
93.实施例2
94.实施例2是实施例1的优选例
95.本发明提出了一种基于体绘制的空中目标尾焰红外图像生成方法,如图1所示,包括:
96.步骤1:建立体绘制所需的三维数据场。计算尾焰的二维流场,提取尾焰不同点的坐标、温度、压力以及co2和h2o摩尔分数等信息,插值构建尾焰的三维流场体网格,确定每个体素与光谱辐亮度以及透过率有关的物理量,建立体绘制所需的三维数据场。
97.本发明采用cfd软件计算尾焰的二维流场分布。为减少三维流场体数据的数据量,沿二维尾焰x轴(轴向)和y轴(径向)分别选择等距空间步长的网格节点,构成数据结构有序且网格节点数较少的结构化网格,根据该网格中每个网格点的位置坐标以及二维流场的计算结果,插值计算出该二维结构化网格的流场分布,作为构建三维流场体数据的输入。
98.设二维结构化网格数量为m
×
n,x轴与y轴的网格步长分别为δx和δy,则构建的三维流场体网格节点数为m(2n-1)(2n-1),尺寸为(m-1)δx
×
2(n-1)δy
×
2(n-1)δy。在此基础上依次计算体网格每个节点与尾焰中轴线(即x轴)的垂距r。当r》(n-1)δy时,说明该网格点在尾焰范围之外,此时将该网格点的流场参数均置为0;当r≤(n-1)δy时,则根据r的大小,利用线性插值计算出该网格点的流场参数,最终得到尾焰的三维流场体数据,图2所示为二维流场构建三维数据场示意图。
99.根据插值得到的体数据网格点的流场参数,确定每个网格点与光谱辐亮度和透过率计算有关的红外特性参数。光谱辐亮度可由普朗克公式计算得到:
[0100][0101]
其中:l
b,λ
为该网格点尾焰的光谱辐亮度,w/(m2·
sr
·
μm);ε为该网格点尾焰的发射率,ε
λ
=1-τ
λ
;λ为波长,μm;t为该网格点尾焰的温度,k;c1为第一辐射常量,3.742
×
10-16w
·
m2;c2为第二辐射常量,1.438
×
10-2m·
k。
[0102]
透过率可由贝尔定律得到:
[0103]
τ
λ
=exp(-δlk
λ
)
[0104]
其中:τ
λ
为该网格点尾焰的透过率;δl为该网格点尾焰的厚度,m;k
λ
为该网格点尾焰的吸收系数,cm-1
。
[0105]
空中目标尾焰通常含有较多高温的二氧化碳和水蒸气,其具有很强的辐射本领,
且对波长具有选择性,因此尾焰的吸收系数主要受二氧化碳和水蒸气的影响。
[0106]
二氧化碳及水蒸气的光谱吸收系数计算公式如下:
[0107][0108][0109]
其中:c为该网格点尾焰组分的摩尔分数;p为该网格点尾焰的实际压强,pa;t为该网格点尾焰的温度,k;为标准大气压下,二氧化碳以及水蒸气的光谱吸收系数,cm-1
。
[0110]
因此,尾焰在厚度l下的透过率为:
[0111][0112]
通过上述计算分析可知,光谱辐亮度与透过率的计算需要确定尾焰的光谱吸收系数以及尾焰对应温度下的黑体光谱辐亮度,因此以其作为体素的物理特性,构建尾焰的三维数据场。
[0113]
步骤二:传感器和目标6dof数据的坐标系转换。将以传感器起始点为零点的地面坐标系下的传感器和目标的6dof数据,转换为以目标质心为零点的坐标系下,确定传感器与目标相对的俯仰角、方位角以及相对距离。
[0114]
典型的轨迹数据中通常包含飞行时间、传感器和目标在地面坐标系的位置以及姿态等信息。为生成空中目标尾焰的红外图像,需要确定传感器相对于目标的空间信息,包括传感器相对于目标的俯仰角、方位角以及二者之间的距离,即需要将传感器在地面坐标系下的描述转换为目标坐标系下的描述。
[0115]
设地面坐标系为axyz,目标坐标系为ox1y1z1,将地面坐标系平移,使其原点a与目标坐标系原点o重合,此时目标坐标系与地面坐标系的位置关系可用偏航角ψ、俯仰角θ和滚转角γ来确定。由于尾焰的轴对称特性,可以忽略滚转角对尾焰红外成像的影响,因此地面坐标系到目标坐标系的变换矩阵可表示为l(ψ,θ)。通过绕相应坐标轴依次旋转ψ和θ,得到两个基元变换矩阵,其乘积即为l(ψ,θ)。图3所示为目标坐标系与地面坐标系的相对关系示意图。
[0116]
若地面坐标系下目标指向传感器的向量a表示为(x,y,z),将地面坐标系axyz绕ay轴旋转ψ角形成过渡坐标系ax'yz1,则其在过渡坐标系下可表示为:
[0117][0118]
其中基元变换矩阵ly(ψ)如下:
[0119][0120]
在此基础上绕过渡坐标系az1轴旋转θ角,即可得到目标坐标系ox1y1z1,则:
[0121][0122]
其中基元变换矩阵lz(θ)如下:
[0123][0124]
根据上述推导,地面坐标系下目标指向传感器的向量a三个分量(x,y,z)在目标坐标系下可表示为:
[0125][0126]
由此可推导得到:
[0127][0128][0129]
通过角度变换以及距离公式即可得到飞行过程中每个时刻传感器相对于目标的俯仰角、方位角以及距离。
[0130]
步骤三:基于体绘制技术的光线投射算法生成尾焰红外图像。根据传感器和目标的相对位置,确定光线方向,沿着光线方向对尾焰体数据进行采样,确定采样点的光谱辐亮度和透过率,合成计算出成像面每个像素点的能量值。
[0131]
基于体绘制技术的光线投射算法可将三维体数据投影在二维图像平面上,其以三维体数据中每个体素为基本操作单位,计算出每个体素对显示图像的影响,其原理如下:
[0132]
根据步骤一和步骤二,得到空中目标尾焰的三维体数据、视点位置以及视线方向,从成像面每个像素出发,以视点位置o为起始位置,沿着视线方向发射一条光线,判断光线与尾焰三维体数据的相交情况。当光线与体数据边界相交时,从交点p开始以等距采样步长l对体素进行采样,每个采样点坐标可表示为p
sample
=p nl,n表示第n个采样点,根据采样点在当前体素的空间位置以及该体素8个顶点的数据,利用三线性插值计算出采样点的流场参数和红外辐射特性参数,进而确定每个采样点对红外图像每个像素点能量的贡献值(包含该采样点尾焰的辐亮度以及对其后方尾焰能量的衰减),最终得到尾焰的红外图像,图4所示为基于体绘制的尾焰红外成像示意图。
[0133]
设某像素发出的光线穿过尾焰三维体数据后共得到n个采样点,则该像素点的光谱辐亮度计算公式如下:
[0134][0135]
其中,l
λ
表示成像面光谱辐亮度,表示黑体光谱辐射亮度,δli表示采样距离长度,k
λ,i
表示光谱衰减系数。
[0136]
通过对上式在相应波段范围内进行积分,即可得到该像素点的辐亮度。
[0137]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
[0138]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
