1.本公开内容的实施方式一般关于制造系统,且更特定而言关于使用机器学习来检测及校正基板处理漂移。
背景技术:
2.在制造系统中执行的处理配方可被配置为实现特定的基板质量及一致性。制造系统的部件可能变得有缺陷,导致制造系统中的一个或多个条件在基板处理期间意外改变。若没有采取措施来解决有缺陷的部件(例如,识别及替换有缺陷的部件、修改处理配方以抵消有缺陷的部件的影响等),则在基板的处理期间可能会产生错误,并且成品基板可能存在缺陷。随着时间的推移,在制造系统中处理的基板的质量及一致性可能偏离与处理配方相关联的目标质量及一致性。然而,制造系统的操作者可能难以识别偏离目标质量及一致性的漂移,难以确定导致漂移的有缺陷的部件,且难以确定解决质量及一致性漂移的适合措施。
技术实现要素:
3.所描述的一些实施方式涵盖一种系统,该系统包括存储器及耦接至该存储器的处理装置。该处理装置将提供与根据处理配方在制造系统中处理第一组基板中的每一个基板相关联的数据,以作为经训练的机器学习模型的输入。该处理装置进一步从经训练的机器学习模型获得一个或多个输出。该处理装置进一步根据一个或多个输出确定第一组基板的第一组计量测量值相对于目标计量测量值的漂移量。该处理装置进一步根据一个或多个输出确定识别对处理配方的一个或多个修改的处理配方修改数据,并且对每个修改确定对处理配方的相应修改满足第二组基板的漂移准则的置信水平的指示。处理装置进一步识别具有满足置信水平准则的置信水平的相应的修改。处理装置进一步基于相应的修改来更新处理配方。
4.在一些实施方式中,提供一种用于训练机器学习模型以预测针对制造系统中正在处理的当前基板的特定处理配方的修改的方法。该方法包括为机器学习模型产生第一训练数据。第一训练数据包括与根据第一处理配方在制造系统中先前处理的第一组先前基板相关联的历史数据,及与该组先前基板中的每一个基板相关联的第一组历史计量测量值。该方法进一步包括为机器学习模型产生第二训练数据。第二训练数据包括与根据第二处理配方在制造系统中先前处理的第二组先前基板相关联的历史数据,及与该组先前基板中的每一个基板相关联的第二组历史计量测量值。该方法进一步包括为机器学习模型产生第三训练数据。第三训练数据包括第一处理配方与第二处理配方之间的差异的指示。该方法进一步包括提供第一训练数据、第二训练数据及第三训练数据,以训练机器学习模型,从而为制造系统中正在处理的当前基板的特定处理配方预测对该处理配方的哪个修改将满足当前基板之后的待处理的一组后续基板的漂移准则。
5.在一些实施方式中,一种非暂时性计算机可读取储存介质包括指令,这些指令在
由处理装置执行时,使得处理装置提供与根据处理配方在制造系统中处理第一组基板中的每一个基板相关联的数据,以作为经训练的机器学习模型的输入。该处理装置进一步从经训练的机器学习模型获得一个或多个输出。该处理装置进一步根据一个或多个输出确定第一组基板的第一组计量测量值相对于目标计量测量值的漂移量。该处理装置进一步根据一个或多个输出确定识别对处理配方的一个或多个修改的处理配方修改数据,并且针对每个修改确定对处理配方的相应修改满足第二组基板的漂移准则的置信水平的指示。处理装置进一步识别具有满足置信水平准则的置信水平的相应的修改。处理装置进一步基于相应的修改来更新处理配方。
附图说明
6.在附图的各图中,以示例的方式而非限制的方式示出了本公开内容,各图中相似的附图标记表示相似的部件。应当注意,本公开内容中对“一”或“一个”实施方式的不同引用不一定指示同一实施方式,且此种引用意味着至少一个。
7.图1绘示了根据本公开内容多个方面的说明性计算机系统架构。
8.图2是根据本公开内容多个方面的用于训练机器学习模型的方法的流程图。
9.图3是根据本公开内容多个方面的示例制造系统的俯视示意图。
10.图4是根据本公开内容多个方面的基板测量子系统的示意性横截面侧视图。
11.图5示出了根据本公开内容多个方面的为基板收集到的光谱数据。
12.图6是根据本公开内容多个方面使用机器学习来检测基板漂移并预测特定处理配方的修改的方法的流程图。
13.图7绘示了根据本公开内容的一个或多个方面操作的说明性计算机系统的方块图。
具体实施方式
14.本文描述的实施方式提供了使用机器学习模型来检测及校正基板处理漂移的方法及系统。基板处理漂移是指根据特定处理配方在制造系统中处理的基板的质量和/或一致性的漂移。可基于在制造系统中根据处理配方处理的一组基板的计量测量值相对于目标计量测量值的漂移,来检测基板处理漂移。计量测量值可包括蚀刻速率(即,沉积在基板表面上的某种材料在处理腔室中被蚀刻的速率)、蚀刻速率均匀性(即,基板表面的两个或更多部分处的蚀刻速率的变化)、临界尺寸(即,用于测量诸如线、列、开口、间隔等基板组件尺寸的测量单位)、临界尺寸均匀性(即,整个基板表面上临界尺寸的变化)、边缘到边缘的放置误差(edge to edge placement error;epe)(即,基板表面上包含的预期及所产生特征之间的差异)等。
15.处理装置(例如,用于制造系统的系统控制器)可接收与根据处理配方在制造系统中处理一组基板相关联的数据。数据可从制造系统的各个站点处的传感器接收。例如,处理装置可从处理腔室、传送腔室、装载锁定、工厂接口等处的传感器接收数据。在一些实施方式中,处理装置可从基板测量子系统接收在制造系统处处理基板之前或之后与基板相关联的数据。例如,处理装置可接收在处理腔室蚀刻每个基板之后的与每个基板的轮廓相关联的光谱数据。
16.处理装置可提供与处理该组基板相关联的数据和/或在基板被处理之前或之后与基板相关联的数据,以作为经训练的机器学习模型的输入,并从机器学习模型获得一个或多个输出。在一些实施方式中,处理装置也可为该组基板提供一组计量测量值(例如,蚀刻速率、蚀刻速率均匀性、临界尺寸、临界尺寸均匀性、边缘到边缘放置误差等),以作为机器学习模型的输入。例如,处理装置可基于从子基板测量子系统接收的光谱或非光谱数据来确定该组计量测量值中的每一个值。在另一示例中,处理装置可从耦接至制造系统的计量系统接收该组计量测量值中的每一个值。
17.处理装置可根据机器学习模型的输出来确定该组基板的该组计量测量值相对于目标计量测量值的漂移量。处理装置也可确定识别对处理配方的一个或多个修改的处理配方修改数据。对处理配方的修改可包括修改特定处理配方的操作或者产生指令以终止对制造系统中待处理的随后一组基板的处理配方的执行。处理配方修改数据也可包括对处理配方的相应修改满足第二组基板漂移准则的置信水平的指示。响应于确定对处理配方的修改被预测为减少制造系统中随后处理的一组基板的基板处理漂移量,该处理装置可确定对该相应的修改满足漂移准则。处理装置可识别具有满足置信准则的置信水平的相应修改,并基于所识别的修改来更新处理配方。
18.在一些实施方式中,处理配方修改数据可包括制造系统的一个或多个站点的指示,这些站点包括导致基板处理漂移的缺陷。在此种实施方式中,处理装置可向制造系统的用户(例如,操作员)发送通知,该通知包括对包含缺陷的一个或多个站点的指示。在一些实施方式中,指示可包括包含缺陷的一个或多个站点的特定部件。在一些实施方式中,可将通知与对处理配方的相应修改的预测一起发送给制造系统的用户。
19.可使用与根据第一处理配方及第二处理配方在制造系统中先前处理的先前基板相关联的历史数据来训练机器学习模型。也可使用与每个先前基板相关联的历史计量测量值来训练机器学习模型。例如,处理装置(例如,系统控制器)可产生第一训练数据,该第一训练数据包括与根据第一处理配方处理的第一组先前基板相关联的历史数据,及与第一组先前基板中的每一个基板相关联的第一组历史计量测量值。处理装置也可产生第二训练数据,该第二训练数据包括与根据第二处理配方处理的第二组先前基板相关联的历史数据,及与第二组先前基板中的每一个基板相关联的第二组历史计量测量值。第一处理配方可类似于第二处理配方,除了第一处理配方的至少一个操作不同于第二处理配方的操作。例如,第一处理配方的特定操作可包括将处理腔室的内部温度设为100摄氏度(℃),而第二处理配方的对应操作可包括将处理腔室的内部温度设为110℃。处理装置可产生第三训练数据,该第三训练数据包括第一处理配方与第二处理配方之间的差异的指示。根据先前的示例,第三训练数据可指示对应于特定操作的温度设置中的10℃差异的第一处理配方与第二处理配方之间的差异。处理装置可提供第一训练数据、第二训练数据及第三训练数据来训练机器学习模型。
20.本公开内容的多个方面通过提供用于在制造系统中检测及校正基板处理漂移的系统及方法,来解决已知技术的上述缺陷。可基于计量测量值相对于目标计量测量值的漂移来检测基板处理漂移。使用与在制造系统中处理的基板相关联的数据,机器学习模型可检测基板处理漂移何时发生,并预测可能对随后在制造系统中处理的基板发生的漂移进行校正的修改。系统控制器可基于预测的修改来更新处理配方。通过基于预测的修改更新处
理配方,制造系统中的基板处理漂移量将减少,导致制造系统内发生的缺陷数量减少,从而提高整体系统效率。此外,可检测基板相对于目标计量测量值的显著漂移,并且可基于检测到的偏差来启动错误协议(例如,向制造系统的操作员发送错误消息、停止制造系统操作等),从而防止对基板和/或制造系统产生不必要的损坏。
21.图1绘示了根据本公开内容多个方面的说明性计算机系统架构100。在一些实施方式中,计算机系统架构100可被包括以作为用于处理基板的制造系统的一部分,如图3的制造系统300。计算机系统架构100包括客户端装置120、制造设备124、计量设备128、预测服务器112(例如,用以产生预测数据、提供模型适配、使用知识库等),及数据储存器140。预测服务器112可以是预测系统110的一部分。预测系统110可进一步包括服务器机器170及180。制造设备124可包括传感器125,传感器125被配置为获取制造系统中正在处理的基板的数据。在一些实施方式中,制造设备124及传感器126可以是传感器系统的一部分,该传感器系统包括传感器服务器(例如,制造设施中的现场服务服务器(field service server;fss))及传感器标识符读取器(例如,用于传感器系统的前开式标准舱(front opening unified pod;foup)射频识别(radio frequency identification;rfid)读取器)。在一些实施方式中,计量设备128可以是计量系统的一部分,该计量系统包括计量服务器(例如,计量数据库、计量文件夹等)及计量标识符读取器(例如,用于计量系统的foup rfid读取器)。
22.制造设备124可遵循配方或在一段时间内执行运行来生产产品。制造设备124可包括基板测量子系统,该子系统包括嵌入在基板测量子系统内的一个或多个传感器126,传感器126被配置为产生基板的光谱数据和/或位置数据。被配置为产生光谱数据的传感器126(本文称为光谱感测部件)可包括反射计传感器、椭偏传感器、热光谱传感器、电容传感器等。在一些实施方式中,光谱感测部件可包括在基板测量子系统或制造系统的另一部分中。一个或多个传感器126(例如,涡电流传感器等)也可被配置为产生基板的非光谱数据。参考图3及图4提供关于制造设备124及基板测量子系统的进一步细节。
23.在一些实施方式中,传感器126可提供与制造设备124相关联的传感器数据。传感器数据可包括温度(例如,加热器温度)、间距(spacing;sp)、压力、高频射频(high frequency radio frequency;hfrf)、静电夹具(electrostatic chuck;esc)电压、电流、流量、功率、电压等中的一者或多者的值。传感器数据可与制造参数相关联,或指示制造参数,制造参数诸如是硬件参数(诸如制造设备124的设定或部件(例如尺寸、类型等)),或制造设备124的处理参数。可在制造设备124执行制造处理的同时提供传感器数据(例如,处理产品时的设备读数)。对于每个基板,传感器数据142可不同。
24.计量设备128可提供与由制造设备124所处理的基板(例如,晶片等)相关联的计量数据。计量数据可包括膜特性数据(例如,晶片空间膜特性)、尺寸(例如,厚度、高度等)、介电常数、掺杂浓度、密度、缺陷等的一者或多者的值。在一些实施方式中,计量数据可进一步包括一个或多个表面轮廓特性数据(例如,蚀刻速率、蚀刻速率均匀性、基板表面上包括的一个或多个特征的临界尺寸、整个基板表面的临界尺寸均匀性、边缘放置误差等)的值。计量数据可以是成品或半成品。每个基板的计量数据可不同。
25.客户端装置120可包括计算装置,如个人计算机(personal computer;pc)、膝上型计算机、移动电话、智能电话、平板计算机、上网本计算机、网络连接电视(“智能电视”)、网络连接媒体播放器(例如蓝光播放器)、机顶盒、过顶(over-the-top;ott)流媒体装置、操作
者盒等。在一些实施方式中,可从客户端装置120接收计量数据。客户端装置120可显示图形用户界面(graphical user interface;gui),其中gui使得用户能够提供在制造系统中处理的基板的计量测量值作为输入。
26.数据储存器140可为存储器(例如随机存取存储器)、驱动器(例如硬盘驱动器、闪存驱动器)、数据库系统或能够储存数据的另一类型的部件或装置。数据储存器140可包括可跨越多个计算装置(例如,多个服务器计算机)的多个储存部件(例如,多个驱动器或多个数据库)。数据储存器140可储存与在制造设备124处理基板相关联的数据。例如,数据储存器140可储存在基板处理之前、期间或之后由制造设备124处的传感器126收集的数据(称为处理数据)。处理数据可指历史处理数据(例如,针对制造系统中处理的先前基板而产生的处理数据)和/或当前处理数据(例如,针对制造系统中处理的当前基板而产生的处理数据)。数据储存器也可储存与制造设备124处理的基板的一部分相关联的光谱数据或非光谱数据。光谱数据可包括历史光谱数据和/或当前光谱数据。当前处理数据和/或当前光谱数据可以是为其产生预测数据的数据。在一些实施方式中,数据储存器可储存包括历史计量数据(例如,制造系统中处理的先前基板的计量测量值)的计量数据。
27.数据储存器140亦可储存与在制造系统中处理的一个或多个基板相关联的上下文数据。上下文数据可包括配方名称、配方步骤数目、预防性维护指示符、操作员等。在一些实施方式中,上下文数据也可包括两个或多个处理配方或处理步骤之间的差异的指示。例如,第一处理配方可包括一个操作,该操作包括将处理腔室的内部温度设为100℃。第二处理配方可包括对应的操作,该操作包括将处理腔室的内部温度设为110℃。上下文数据可包括第一处理配方及第二处理配方之间的处理腔室内部温度差异的指示。
28.在一些实施方式中,数据储存器140可被配置为储存制造系统的用户无法访问的数据。例如,制造系统的用户可能无法访问针对制造系统中正在处理的基板获得的处理数据、光谱数据、非光谱数据和/或位置数据。在一些实施方式中,制造系统的用户(例如,操作员)可能无法访问储存在数据储存器140中的所有数据。在其他或类似的实施方式中,用户可能无法访问储存在数据储存器140中的一部分数据,而用户可访问储存在数据储存器140中的另一部分数据。在一些实施方式中,储存在数据储存器140的数据的一个或多个部分可使用用户未知的加密机制来加密(例如,使用私有加密密钥来加密数据)。在其他或类似的实施方式中,数据储存器140可包括多个数据储存器,其中用户无法访问的数据储存在一个或多个第一数据储存器中,而用户可访问的数据储存在一个或多个第二数据储存器中。
29.在一些实施方式中,预测系统110包括服务器机器170及服务器机器180。服务器机器170包括训练集产生器172,训练集产生器172能够产生训练数据集(例如,一组数据输入及一组目标输出)来训练、验证和/或测试机器学习模型190。下文参考图2详细描述训练集产生器172的一些操作。在一些实施方式中,训练集产生器172可将训练数据划分为训练集、验证集及测试集。在一些实施方式中,预测系统110产生多个训练数据集。
30.服务器机器180可包括训练引擎182、验证引擎184、选择引擎185和/或测试引擎186。引擎可指硬件(例如,电路系统、专用逻辑、可编程逻辑、微码、处理装置等)、软件(如在处理装置、通用计算机系统或专用机器上运行的指令)、固件、微码或上述各者的组合。训练引擎182能够训练机器学习模型190。机器学习模型190可指由训练引擎182使用包括训练输入及对应目标输出(相应训练输入的正确答案)的训练数据所创建的模型人工制品。训练引
擎182可在训练数据中找到将训练输入映像到目标输出(待预测的答案)的模式,并提供捕获这些模式的机器学习模型190。机器学习模型190可使用支持向量机(support vector machine;svm)、径向基函数(radial basis function;rbf)、聚类、监督机器学习、半监督机器学习、无监督机器学习、k-最邻近算法(k-nearest neighbor algorithm;k-nn)、线性回归、随机森林、神经网络(例如,人工神经网络)等中的一者或多者。
31.验证引擎184能够使用来自训练集产生器172的验证集的对应特征集来验证经训练的机器学习模型190。验证引擎184可基于验证集的对应特征集来确定每个经训练的机器学习模型190的精度。验证引擎184可丢弃精度不满足阈值精度的经训练机器学习模型190。在一些实施方式中,选择引擎185能够选择精度满足阈值精度的经训练机器学习模型190。在一些实施方式中,选择引擎185能够选择经训练机器学习模型190中具有最高精度的经训练机器学习模型190。
32.测试引擎186能够使用来自训练集产生器172的测试集的对应特征集来测试经训练的机器学习模型190。例如,使用训练集的第一特征集训练的第一经训练机器学习模型190可通过使用测试集的第一特征集进行测试。测试引擎186可基于测试集来在所有经训练的机器学习模型中确定具有最高精度的经训练机器学习模型190。
33.预测服务器112包括预测部件114,该预测部件114能够提供与根据处理配方在制造系统中处理一组基板中的每一个基板相关联的数据,以作为经训练机器学习模型190的输入,并基于该输入运行经训练的机器学习模型190,以获得一个或多个输出。如下文参考图4详细描述的,在一些实施方式中,预测部件114也能够根据经训练的机器学习模型190的输出来确定处理配方修改数据,并使用该处理配方修改数据来预测对制造系统中正在处理的当前基板的处理配方的满足漂移准则的修改。
34.处理配方修改数据可包括或指示对处理配方的一个或多个修改,并且对于每个修改的相应修改满足漂移准则的置信水平。预测系统110可响应于确定相应修改被预测为导致待处理的一组后续基板的预测计量测量值组的漂移量低于阈值量,来确定相应的修改满足漂移准则。例如,响应于预测系统110确定将处理腔室的内部温度改变达10℃的修改可能导致待处理基板的计量测量值漂移量降低至阈值量,该修改可满足漂移准则。在一些实施方式中,处理配方修改数据可包括制造系统100中的正在导致基板处理漂移的一个或多个站点的指示。例如,处理配方修改数据可指示特定处理腔室的温度传感器有缺陷。在一些实施方式中,预测系统110可向制造系统100的用户(例如,操作员)发送通知,指示正在导致基板处理漂移的一个或多个站点(或特定站点的一个或多个部件)。
35.客户端装置120、制造设备124、传感器126、计量设备128、预测服务器112、数据储存器140、服务器机器170及服务器机器180可经由网络130彼此耦合。在一些实施方式中,网络130是公共网络,其向客户端装置120提供对预测服务器112、数据储存器140及其他公共可用计算装置的访问。在一些实施方式中,网络130是私有网络,其向客户端装置120提供对制造设备124、计量设备128、数据储存器140及其他私有可用计算装置的访问。网络130可包括一个或多个广域网(wide area network;wan)、局域网(local area network;lan)、有线网络(例如以太网)、无线网络(例如802.11网络或wi-fi网络)、蜂窝网络(例如长期演进网络(long term evolution;lte))、路由器、集线器、交换机、服务器计算机、云端计算网络和/或上述各者的组合。
36.应当注意,在一些其他实施方式中,服务器机器170及180及预测服务器112的功能可由更少数量的机器提供。例如,在一些实施方式中,服务器机器170及180可整合至单个机器中,而在一些其他或类似的实施方式中,服务器机器170及180及预测服务器112可整合至单个机器中。
37.一般而言,在一个实施方式中描述为由服务器机器170、服务器机器180和/或预测服务器112执行的功能也可在客户端装置120上执行。此外,归属于一个特定部件的功能性可由一起操作的不同或多个部件来执行。
38.在实施方式中,“用户”可表示为单个个体。然而,本公开内容的其他实施方式包含的“用户”是由多个用户和/或自动化源控制的实体。例如,作为一组管理员联合的一组个人用户可被视作“用户”。
39.图2是根据本公开内容多个方面的用于训练机器学习模型的方法200的流程图。方法200由可包括硬件(电路系统、专用逻辑等)、软件(如在通用计算机系统或专用机器上运行的软件)、固件或上述各者的某种组合的处理逻辑来执行。在一个实施方式中,方法200可由计算机系统执行,如图1的计算机系统架构100。在其他或类似的实施方式中,方法200的一个或多个操作可由图中未示出的一个或多个其他机器来执行。在一些方面中,方法200的一个或多个操作可由服务器机器170的训练集产生器172来执行。
40.为了解释简单,将这些方法绘示及描述为一系列动作。然而,根据本公开内容的动作可以以各种次序和/或同时发生,及与本文未显示及描述的其他动作一起发生。此外,实施根据所公开主题的方法并非要执行所有示出的动作。此外,本领域技术人员将理解及认识到,这些方法可替代地通过状态图或事件表示为一系列相互关联的状态。此外,应当理解,本说明书中公开的方法能够储存在制品上,以便于将这些方法传输及转移至计算装置。本文使用的术语制品意欲包括可从任何计算机可读装置或储存介质访问的计算机程序。
41.在方块210,处理逻辑将训练集t初始化为空集(例如{})。在方块212,处理逻辑接收与根据第一处理配方处理第一组基板及根据第二处理配方处理第二组基板相关联的数据。在一些实施方式中,如前所述,可从传感器126接收与处理第一组基板相关联的数据。例如,处理逻辑可从处理腔室、传送腔室、装载锁定、工厂接口、基板载体等处的传感器接收数据。在其他或类似的实施方式中,处理逻辑也可从基板测量子系统接收数据,如参考图4描述的基板测量子系统400。基板测量子系统可被配置为在制造系统中处理基板之前或之后捕获与基板相关联的光谱或非光谱数据。处理逻辑可从基板测量子系统接收与第一组基板中的每一个基板相关联的数据。基板测量子系统可与制造系统整合(例如,作为工厂接口的一部分),或者可不与制造系统整合,而是可通信地耦接至制造系统。下文参照图3和图4描述关于基板测量系统的更多细节。应当注意,在额外的或替代的实施方式中,与处理第一组基板相关联的数据可以通过某种其他方式接收,并且可不从制造系统的一部分接收。
42.在方块214,处理逻辑获得第一组基板及第二组基板中的每一个基板的计量测量值。计量测量值可包括制造系统中处理的基板的蚀刻速率、蚀刻速率均匀性、临界尺寸、临界尺寸均匀性、边缘到边缘放置误差等中的至少一者。在一些实施方式中,可从耦接至制造系统的外部计量系统接收计量测量值,如参考图1所述。在一些实施方式中,外部计量测量系统可通信地耦接至制造系统(例如,经由图1的网络130)。在此种实施方式中,处理逻辑可经由网络从外部计量测量系统接收基板的一个或多个计量测量结果。在其他实施方式中,
计量测量结果可在外部计量测量系统处产生,并通过客户端装置提供至制造系统。例如,连接至制造系统的客户端装置可向制造系统的用户(例如,操作员)提供图形用户界面(graphical user interface;gui)。在外部计量子系统测量基板之后,用户可通过gui向客户端装置提供计量测量值。响应于接收到所提供的计量测量值,客户端装置可将计量测量值储存在数据储存器中,如制造系统的数据储存器140。
43.在其他或类似的实施方式中,处理逻辑可使用机器学习模型来确定计量测量值,该机器学习模型(称为计量机器学习模型)被训练来预测在制造系统中处理的基板的计量测量值。例如,可在制造系统的基板处理期间或之后产生基板的光谱数据(例如,在基板测量子系统处、在处理腔室处)。光谱数据可作为输入被提供至经训练的计量机器学习模型。在一些实施方式中,也可产生基板的位置数据(例如,在基板测量子系统处),其中位置数据与光谱数据相关联。在此种实施方式中,位置数据可作为另一输入与光谱数据一起被提供至经训练的计量机器学习模型。经训练的计量机器学习模型可产生一个或多个输出,输出包括在制造系统中处理的先前基板的计量测量值,及在制造系统中处理的当前基板与先前基板的计量测量相关联的置信水平。响应于确定当前基板的置信水平满足置信水平准则,处理逻辑可确定计量测量值对应于当前基板。
44.在一些实施方式中,处理逻辑可从耦接至制造系统的计量系统接收第一组基板和/或第二组基板中的每一个基板的每个计量测量值。在其他或类似的实施方式中,处理逻辑可使用经训练的计量机器学习模型来确定第一组基板和/或第二组基板中的每一个基板的每个计量测量值。在其他或类似的实施方式中,处理逻辑可从计量系统接收第一组基板和/或第二组基板的一个或多个基板的计量测量值,并使用经训练的计量机器学习模型来确定计量测量值。
45.在方块216,处理逻辑基于与根据第一处理配方处理的第一组基板相关联的历史数据,及第一组基板中的每一个基板的计量测量结果,来产生第一训练数据。在方块218,处理逻辑基于与根据第一处理配方处理的第一组基板相关联的历史数据,及第一组基板中的每一个基板的计量测量结果,来产生第二训练数据。在方块220,处理逻辑产生第三训练数据,该第三训练数据包括第一处理配方与第二处理配方之间的差异的指示。例如,第一处理配方可包括一个操作,该操作包括将处理腔室的内部温度设为100℃。第二处理配方可包括对应的操作,该操作包括将处理腔室的内部温度设为110℃。第三训练数据可包括第一处理配方及第二处理配方之间的处理腔室内部温度差异的指示。
46.在方块222,处理逻辑产生第一训练数据、第二训练数据与第三训练数据之间的映射。该映射是指包括或基于根据第一处理配方处理的第一组基板的数据的第一训练数据,包括或基于根据第二处理配方处理的第二组基板的数据的第二训练数据,及包括第一处理配方与第二处理配方之间差异的指示的第三训练数据,且其中第一训练数据及第二训练数据与第三训练数据相关联(或映射到第三训练数据)。在方块224,处理逻辑将映射添加至训练集t。
47.在方块226,处理逻辑确定训练集t是否包括足够的训练数据来训练机器学习模型。应当注意,在一些实施方式中,可简单地基于训练集中的映射数量来确定训练集t的充分性,而在一些其他实施方式中,作为输入/输出映射的数量的补充或替代,也可基于一个或多个其他准则(例如,训练示例的多样性计量等)来确定训练集t的充分性。响应于确定训
练集未包括足够的训练数据来训练机器学习模型,方法200返回至方块212。响应于确定训练集t包括足够的训练数据来训练机器学习模型,方法200继续进行至方块228。
48.在方块228,处理逻辑提供训练集t来训练机器学习模型。在一个实施方式中,训练集t被提供至服务器180的训练引擎182以执行训练。例如,在神经网络的情况下,给定输入/输出映射的输入值(例如,前一基板的光谱数据)被输入至神经网络,且输入/输出映射的输出值被储存在神经网络的输出节点中。随后根据学习算法(例如反向传播等)调整神经网络中的连接权重,并针对训练集t中的其他输入/输出映射重复该程序。在方块228之后,机器学习模型190可用于针对制造系统中正在处理的当前基板的特定处理配方来预测对处理配方的哪个修改将满足在当前基板之后待处理的一组后续基板的漂移准则。
49.图3是根据本公开内容多个方面的示例制造系统300的俯视示意图。制造系统300可在基板302上执行一个或多个处理。基板302可为任何具有适合刚性、固定尺寸的平面制品,诸如,例如含硅圆盘或晶片、图案化晶片、玻璃板等,适于在其上制造电子器件或电路部件。
50.制造系统300可包括处理工具304及耦接至处理工具304的工厂接口306。处理工具304可包括其中具有传送腔室310的外壳308。传送腔室310可包括一个或多个处理腔室(也称为处理室)314、316、318,这些处理腔室安置在传送腔室310附近并与其耦接。处理腔室314、316、318可通过各自的端口(如狭缝阀等)耦接至传送腔室310。传送腔室310也可包括传送腔室机器人312,该机器人被配置为在处理腔室314、316、318、装载锁定320等之间传送基板302。传送腔室机器人312可包括一个或多个臂,其中每个臂包括位于每个臂端部的一个或多个端效器。端效器可被配置为搬运特定的对象,如晶片。
51.处理腔室314、316、318可适于在基板302上执行任意数量的处理。在每个处理腔室314、316、318中可进行相同或不同的基板处理。基板处理可包括原子层沉积(atomic layer deposition;ald)、物理气相沉积(physical vapor deposition;pvd)、化学气相沉积(chemical vapor deposition;cvd)、蚀刻、退火、固化、预清洁、金属或金属氧化物去除等。在一些实施方式中,基板处理可包括原子层沉积(atomic layer deposition;ald)、物理气相沉积(physical vapor deposition;pvd)、化学气相沉积(chemical vapor deposition;cvd)、蚀刻、退火、固化、预清洁、金属或金属氧化物去除等中的两者或更多者的组合。可在其中的基板上实施其他处理。处理腔室314、316、318可各自包括一个或多个传感器,这些传感器被配置为在基板处理之前、之后或期间捕获基板302的数据。例如,一个或多个传感器可被配置为在基板处理期间捕获基板302的一部分的光谱数据和/或非光谱数据。在其他或类似的实施方式中,一个或多个传感器可被配置为在基板处理之前、之后或期间捕获与处理腔室314、316、318内的环境相关联的数据。例如,一个或多个传感器可被配置为在基板处理期间捕获与处理腔室314、316、318内的环境的温度、压力、气体浓度等相关联的数据。
52.装载锁定320也可耦接至外壳308及传送腔室310。装载锁定320可被配置为连接至及耦接至传送腔室310的一侧及工厂界面306。在一些实施方式中,装载锁定320可具有环境受控的气氛,该气氛可从真空环境(在真空环境中基板可被传送进出传送腔室310)改变至大气压或接近大气压的惰性气体环境(在惰性气体环境中基板可被传送进出工厂接口306)。装载锁定320可包括一个或多个传感器,以在处理腔室314、316、318的基板处理之前、之后或期间捕获与基板302相关联的数据。例如,装载锁定320可包括振动传感器(例如,压
电传感器),其被配置为检测及监控在处理腔室314、316、318的基板处理期间在装载锁定320内发生的振动量。在另一示例中,装载锁定320可包括温度传感器(例如,红外照相机),以在基板处理期间检测及监控装载锁定320的温度。应当注意,尽管本公开内容的实施方式描述了在基板处理期间在装载锁定320处监控装载锁定320状态的传感器,如振动传感器或温度传感器,但任何类型的传感器都可在制造系统100的任何站点使用,以在基板处理期间监控该站点的状态和/或健康状况。
53.工厂接口306可以是任何合适的外壳,如设备前端模块(equipment front end module;efem)。工厂接口306可被配置为从对接在工厂接口306的各个装载端口324的基板载体322(例如,前开式标准舱(front opening unified pod;foup))处接收基板302。工厂接口机器人326(以虚线示出)可被配置为在载体(也称为容器)322与装载锁定320之间传送基板302。载体322可为基板储存载体或替换部件储存载体。工厂接口306和/或载体322可包括一个或多个传感器(例如,振动传感器、温度传感器等)以根据前述实施方式在处理腔室314、316、318中的基板处理之前、之后或期间捕获与基板302相关联的数据。
54.制造系统300也可连接至客户端装置(未示出),该客户端装置被配置为向用户(例如,操作者)提供关于制造系统300的信息。在一些实施方式中,客户端装置可经由一个或多个图形用户界面(graphical user interface;gui)向制造系统300的用户提供信息。例如,客户端装置可通过gui提供关于要对基板302的处理配方进行的一个或多个修改的信息。
55.制造系统300也可包括系统控制器328。系统控制器328可以是和/或包括计算装置,如个人计算机、服务器计算机、可编程逻辑控制器(programmable logic controller;plc)、微控制器等。系统控制器328可包括一个或多个处理装置,这些装置可以是通用处理装置,如微处理器、中央处理单元等。更特定而言,处理装置可以是复杂指令集计算(complex instruction set computing;cisc)微处理器、精简指令集计算(reduced instruction set computing;risc)微处理器、超长指令字(very long instruction word;vliw)微处理器、实施其他指令集的处理器或者实施指令集组合的处理器。处理装置也可以是一个或多个专用处理装置,如特殊应用集成电路(application specific integrated circuit;asic)、现场可编程门阵列(field programmable gate array;fpga)、数字信号处理器(digital signal processor;dsp)、网络处理器等。系统控制器328可包括数据储存装置(例如,一个或多个磁盘驱动器和/或固态驱动器)、主存储器、静态存储器、网络接口和/或其他部件。系统控制器328可执行指令以执行本文描述的方法和/或实施方式中的任何一者或多者。在一些实施方式中,系统控制器328可执行指令,以根据处理配方在制造系统300处执行一个或多个操作。指令可储存在计算机可读取储存介质上,该介质可包括主存储器、静态存储器、二级储存装置和/或处理装置(在指令执行期间)。
56.系统控制器328可从制造系统300的各个部分(例如,处理腔室314、316、318、传送腔室310、装载锁定320等)上或内部包括的传感器接收数据。在一些实施方式中,系统控制器328接收的数据可包括基板302的一部分的光谱数据和/或非光谱数据。在其他或类似的实施方式中,系统控制器328接收的数据可包括与在处理腔室314、316、318处理基板302相关联的数据,如前所述。出于本说明书的目的,将系统控制器328描述为从包括在处理腔室314、316、318内的传感器接收数据。然而,根据本文描述的实施方式,系统控制器328可从制造系统300的任何部分接收数据,并且可使用从该部分接收的数据。在说明性示例中,系统
控制器328可在处理腔室314、316、318处的基板处理之前、之后或期间,从处理腔室314、316、318的一个或多个传感器接收数据。从制造系统300的各个部分的传感器接收的数据可储存在数据储存器350中。数据储存器350可被包括以作为系统控制器328内的部件,或者可以是与系统控制器328分离的部件。在一些实施方式中,数据储存器350可为参考图1描述的数据储存器140。
57.制造系统300可进一步包括基板测量子系统340。基板测量子系统340可在制造系统300处理基板302之前或之后获得基板302的一个或多个部分的光谱测量。在一些实施方式中,基板测量子系统340可响应于从系统控制器328接收到对光谱测量的请求,来获得基板302的一个或多个部分的光谱测量。基板测量子系统340可整合在制造系统300的一部分中。在一些实施方式中,基板测量子系统340可整合在工厂接口306内。在其他或类似的实施方式中,基板测量子系统340可不与制造系统300的任何部分整合,而替代地可以是独立的部件。在此种实施方式中,在基板测量子系统340处测量的基板302可在制造系统300处理基板302之前或之后传送至制造系统300的一部分,或从制造系统300的一部分传送出。
58.基板测量子系统340可通过产生基板302的一部分的光谱数据和/或光谱,来获得基板302的一部分的光谱测量。在一些实施方式中,基板测量子系统340被配置为产生基板302的光谱数据、非光谱数据、位置数据及其他基板特性数据(例如,基板302的厚度、基板302的宽度等)。在产生基板302的数据之后,基板测量子系统340可将产生的数据传输至系统控制器328。响应于从基板测量子系统340接收到数据,系统控制器328可将数据储存在数据储存器350中。
59.图4是根据本公开内容多个方面的基板测量子系统400的示意性横剖面侧视图。基板测量子系统400可被配置为在处理腔室中处理基板302之前或之后,获得基板(诸如图3的基板302)的一个或多个部分的测量结果。基板测量子系统400可通过产生与基板302的一部分相关联的数据(例如,光谱数据、非光谱数据等)来获得基板302的一部分的测量。在一些实施方式中,基板测量子系统400可被配置为产生与基板302相关联的光谱数据、非光谱数据、位置数据和/或其他特性数据。基板测量子系统400可包括控制器430,控制器430被配置为执行一个或多个指令,以用于产生与基板302的一部分相关联的数据。
60.基板测量子系统400可检测到基板302已经传送至基板测量子系统400。响应于检测到基板302已经传送至基板测量子系统400,基板测量子系统400可确定基板302的位置和/或定向。基板302的位置和/或定向可基于基板302的参考位置的识别来确定。参考位置可以是基板302的一部分,其包括与基板302的特定部分相关联的识别特征。控制器328可基于为基板302确定的识别信息,来确定与基板302的特定部分相关联的识别特征。
61.控制器430可使用一个或多个被配置为捕获基板302的图像数据的照相机部件450,来识别基板302的参考位置。照相机部件450可产生用于基板302的一个或多个部分的图像数据,并将图像数据传输至控制器430。控制器430可分析图像数据以识别与基板302的参考位置相关联的识别特征。控制器430可进一步基于已识别的基板302识别特征来确定图像数据中绘示的基板302的位置和/或定向。控制器430可基于已识别的基板302识别特征及已确定的在图像数据中绘示的基板302位置和/或定向,来确定基板302的位置和/或定向。响应于确定基板302的位置和/或定向,控制器430可产生与基板302的一个或多个部分相关联的位置数据。在一些实施方式中,位置数据可包括一个或多个坐标(例如,笛卡儿坐标、极
坐标等),每个坐标都与基板302的一部分相关联,其中每个坐标都是基于与基板302的参考位置的距离来确定的。
62.基板测量子系统400可包括用于测量基板302的一个或多个测量部件。在一些实施方式中,基板测量子系统400可包括一个或多个光谱感测部件420,其被配置为产生基板302的一个或多个部分的光谱数据。如前所述,对于检测到的波的每个波长,光谱数据可对应于检测到的能量波的强度(即,强度或能量)。参看图5提供关于收集的光谱数据的更多细节。
63.光谱感测部件420可被配置为检测从基板302的一部分反射的能量波,并产生与检测到的波相关联的光谱数据。光谱感测部件420可包括波产生器422及反射波接收器424。在一些实施方式中,波产生器422可为光波产生器,其被配置为产生朝向基板302的一部分的光束。在此种实施方式中,反射波接收器424可被配置为从基板302的一部分接收反射光束。波产生器422可被配置为产生能量流426(例如,光束)并将能量流426传输至基板302的一部分。反射能量波428可从基板302的该部分反射,并被反射波接收器424接收。尽管图3a示出了从基板302的表面反射的单个能量波,但多个能量波可从基板302的表面反射并被反射波接收器424接收。
64.响应于反射波接收器424从基板302的一部分接收到反射能量波428,光谱感测部件420可测量反射能量波428中包括的每个波的波长。光谱感测部件420可进一步测量每个所测量的波长的强度。响应于测量每个波长及每个波长强度,光谱感测部件420可产生基板302的该部分的光谱数据。光谱感测部件420可将产生的光谱数据传输至控制器430。控制器430可响应于接收到产生的光谱数据,产生接收到的光谱数据与基板302的测量部分的位置数据之间的映射。
65.基板测量子系统400可被配置为基于在基板测量子系统400处待被获得的测量类型来产生特定类型的光谱数据。在一些实施方式中,光谱感测部件420可为第一光谱感测部件,其被配置为产生一种类型的光谱数据。例如,光谱感测部件420可被配置为产生反射光谱数据、椭偏光谱数据、高光谱成像数据、化学成像数据、热光谱数据或传导光谱数据。在此种实施方式中,第一光谱感测部件可从基板测量子系统400移除,并被替换为第二光谱感测部件,该第二光谱感测部件被配置为产生不同类型的光谱数据(例如,反射光谱数据、椭偏光谱数据、高光谱成像数据、化学成像数据、涡电流光谱数据、热光谱数据或传导光谱数据)。
66.在一些实施方式中,一个或多个测量部件(诸如光谱感测部件420)可以是基板测量子系统400内的固定部件。在此种实施方式中,基板测量子系统400可包括一个或多个定位部件440,其被配置为相对于光谱感测部件420修改基板302的位置和/或定向。在一些实施方式中,定位部件440可被配置为相对于光谱感测部件420沿着第一轴和/或第二轴平移基板302。在其他或类似的实施方式中,定位部件440可被配置为相对于光谱感测部件420围绕第三轴旋转基板302。
67.当光谱感测部件420产生基板302的一个或多个部分的光谱数据时,定位部件440可根据基板302待测量的一个或多个确定部分来修改基板302的位置和/或定向。例如,在光谱感测部件420产生基板302的光谱数据之前,定位部件440可将基板302定位在笛卡儿坐标(0,0),而光谱感测部件420可产生基板302在笛卡儿坐标(0,0)的第一光谱数据。响应于光谱感测部件420在笛卡儿坐标(0,0)产生基板302的第一光谱数据,定位部件440可沿着第一
轴平移基板302,使得光谱感测部件420被配置为在笛卡儿坐标(0,1)产生基板302的第二光谱数据。响应于光谱感测部件420在笛卡儿坐标(0,1)产生基板302的第二光谱数据,控制器430可沿着第二轴旋转基板302,使得光谱感测部件420被配置为在笛卡儿坐标(1,1)产生基板302的第三光谱数据。该处理可发生多次,直到产生了基板302的每个确定部分的光谱数据。
68.在一些实施方式中,基板302的表面上可包括材料的一层或多层412。一层或多层412可包括蚀刻材料、光刻胶材料、掩模材料、沉积材料等。在一些实施方式中,一个或多个层412可包括将要根据在处理腔室中执行的蚀刻处理来蚀刻的蚀刻材料。根据先前公开的实施方式,在此种实施方式中,可收集沉积在基板302上的层412的未蚀刻的蚀刻材料的一个或多个部分的光谱数据。在其他或类似的实施方式中,一个或多个层412可包括已经根据处理腔室中的蚀刻处理而被蚀刻的蚀刻材料。在此种实施方式中,一个或多个结构特征(例如,线、柱、开口等)可被蚀刻到基板302的一个或多个层412中。在此种实施方式中,可收集蚀刻到基板302的一个或多个层412中的一个或多个结构特征的光谱数据。
69.根据本文所述的实施方式,响应于接收到基板302的光谱数据、位置数据或特性数据中的至少一者,控制器430可将接收到的数据传输至系统控制器328以进行处理及分析。
70.图5示出了根据本公开内容多个方面的收集到的基板光谱数据500。根据本公开内容的方面,光谱数据可从由图4的基板测量子系统400或诸如图3的处理腔室314、316、318的处理腔室的传感器接收的反射能量中产生。如图所示,由基板测量子系统400接收的反射能量波中可包括多个波长。每个反射能量波可与基板302的不同部分相关联。在一些实施方式中,可测量由基板测量子系统400接收的每个反射能量波的强度。如图5所示,可针对由基板测量子系统400接收的反射能量波的每个波长来测量每个强度。每个强度与每个波长之间的关联可以是形成光谱数据500的基础。在一些实施方式中,一个或多个波长可与强度值预期范围之外的强度值相关联。例如,线510可与如线520所示的强度值的预期范围之外的强度值相关联。在此种实施方式中,强度值预期范围之外的强度值可以是在基板302的一部分存在缺陷的指示。
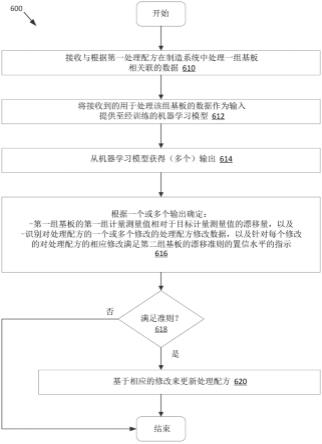
71.图6是根据本公开内容多个方面,使用机器学习来检测基板漂移并预测特定处理配方的修改的方法600的流程图。方法600由可包括硬件(电路系统、专用逻辑等)软件(例如在通用计算机系统或专用机器上运行的软件)、固件或上述各者的某种组合的处理逻辑来执行。在一些实施方式中,方法600可使用图1的预测服务器112及经训练的机器学习模型190来执行。在其他或类似的实施方式中,图6的一个或多个方块步骤可由图1中未示出的一个或多个其他机器来执行。
72.在方块610,处理逻辑接收与根据第一处理配方在制造系统中处理一组基板相关联的数据。在一些实施方式中,处理逻辑可从传感器126接收与处理该组基板相关联的数据,如前所述。例如,处理逻辑可从处理腔室、传送腔室、装载锁定、工厂接口、基板载体等处的传感器接收数据。在其他或类似的实施方式中,处理逻辑也可从基板测量子系统接收数据。
73.在方块612,处理逻辑将接收到的用于处理该组基板的数据作为输入提供至经训练的机器学习模型。根据先前描述的实施方式,在一些实施方式中,处理逻辑可获得该组基板中的每一个基板的一组计量测量值。例如,处理逻辑可从外部计量系统或连接至制造系
统的客户端装置接收该组计量测量值。在另一示例中,处理逻辑可使用经训练的计量机器学习模型来确定该组计量测量值中的每一者。
74.在方块614,处理逻辑从机器学习模型获得输出。在方块616,处理逻辑根据一个或多个输出确定第一组基板的第一组计量测量值相对于目标计量测量值的漂移量。该处理逻辑也根据一个或多个输出确定识别对处理配方的一个或多个修改的处理配方修改数据,并且针对每个修改确定相应修改满足第二组基板的漂移准则的置信水平的指示。对处理配方的修改可包括修改特定处理配方的操作或者产生指令以终止对制造系统中待处理的随后一组基板的处理配方的执行。在一些实施方式中,处理逻辑也可根据一个或多个输出来确定制造系统中正在导致漂移的一个或多个部件的标识符。在此种实施方式中,对处理配方的修改可包括向系统控制器产生指令,以在后续处理期间监控部件的状态,从而确定是否需要替换部件。
75.在方块618,处理逻辑确定一个或多个修改中的每一个修改的置信水平准则是否满足。响应于确定一个或多个修改中的任何一个修改都不满足置信水平准则,方法600结束。处理逻辑可响应于确定相应修改被预测为会减少在制造系统中随后处理的一组基板的基板处理漂移量,来确定对处理配方的修改满足漂移准则。响应于确定一个或多个修改中的至少一个修改满足置信水平准则,处理逻辑识别满足置信水平准则的修改。
76.在方块620,处理逻辑基于所识别的修改来更新处理配方。例如,处理逻辑可对制造系统随后要处理的基板执行处理配方的一个或多个操作。在另一示例中,处理逻辑可产生指令来终止对该组后续基板的处理配方的执行。在一些实施方式中,处理逻辑可向制造系统的操作员产生指示所识别的修改的通知。例如,可通过客户端装置经由gui显示器来提供通知。该通知可包括所识别的修改及一个或多个gui元素,这些gui元素使得操作员能够接受或拒绝该修改。在其他或类似的实施方式中,通知可提供对处理配方的多个替代修改及一个或多个gui元素,这些gui元素使得操作者能够选择对其他替代修改的预测。在其他或类似的实施方式中,处理逻辑可不向制造系统的操作员提供通知,而是可基于所识别的修改来修改处理配方。
77.在一些实施方式中,由于制造系统的一个或多个站点发生的缺陷,可预测对操作的修改。在此种实施方式中,处理逻辑可向制造系统的操作员提供通知,指示包括缺陷的站点,且在一些情况下,指示站点中导致缺陷的特定部件。该通知可与对处理配方的修改通知一起提供,或者与修改通知分开提供。
78.图7绘示了根据本公开内容的一个或多个方面操作的说明性计算机系统700的方块图。在替代实施方式中,机器可连接(例如,联网)至局域网络(local area network;lan)、内部网络、外部网络或互联网中的其他机器。该机器可以以客户端-服务器网络环境中的服务器或客户端机器的身份操作,或者作为同级间(或分布式)网络环境中的同级间机器操作。该机器可以是个人计算机(personal computer;pc)、平板计算机、机顶盒(set-top box;stb)、个人数字助理(personal digital assistant;pda)、蜂窝电话、网络设备、服务器、网络路由器、交换机或网桥,或者能够执行指定该机器要采取的动作的一组指令(顺序或以其他次序)的任何机器。此外,尽管仅示出了单个机器,但术语“机器”也应当被理解为包括单独或联合执行一组(或多组)指令以执行本文论述方法中任何一者或多者的机器(例如,计算机)的任何集合。在实施方式中,计算装置1100可对应于图3的系统控制器328或制
造系统100的另一处理装置。
79.示例计算装置700包括处理装置702、主存储器704(例如,只读存储器(read-only memory;rom)、闪存、动态随机存取存储器(dynamic random access memory;dram)(如同步动态随机存取存储器(synchronous dram;sdram)等)、静态存储器706(例如,闪存、静态随机存取存储器(static random access memory;sram)等)及二级存储器(例如,数据储存装置728),上述各者通过总线708相互通信。
80.处理装置702可表示一个或多个通用处理器,如微处理器、中央处理单元等。更具体而言,处理装置702可为复杂指令集计算(complex instruction set computing;cisc)微处理器、精简指令集计算(reduced instruction set computing;risc)微处理器、超长指令字(very long instruction word;vliw)微处理器、实施其他指令集的处理器或者实施指令集组合的处理器。处理装置802也可以是一个或多个专用处理装置,如特殊应用集成电路(application specific integrated circuit;asic)、现场可编程门阵列(field programmable gate array;fpga)、数字信号处理器(digital signal processor;dsp)、网络处理器等。处理装置702也可以是或包括片上系统(system on a chip;soc)、可编程逻辑控制器(programmable logic controller;plc)或其他类型的处理装置。处理装置702被配置为执行处理逻辑,以用于实施本文论述的操作及步骤。
81.计算装置700可进一步包括用于与网络764通信的网络接口装置722。计算装置700也可包括视频显示单元710(例如,液晶显示器(liquid crystal display;lcd)或阴极射线管(cathode ray tube;crt))、字母数字输入设备712(例如,键盘)、光标控制装置714(例如,鼠标)及信号产生装置720(例如,扬声器)。
82.数据储存装置728可包括机器可读取储存介质(或者更具体而言,非暂时性计算机可读取储存介质)724,其上储存了一组或多组指令726,这些指令726体现了本文描述的方法或功能中的任何一者或多者。其中非暂时性储存介质指除载波之外的储存介质。指令726也可在由计算机装置700执行期间完全或至少部分地驻留在主存储器704和/或处理装置702中,主存储器704及处理装置702也构成计算机可读取储存介质。
83.计算机可读取储存介质724也可用于储存模型190及用于训练模型190的数据。计算机可读取储存介质724也可储存包含调用模型190的方法的软件库。尽管计算机可读取储存介质724在示例实施方式中被示为单个介质,但是术语“计算机可读取储存介质”应当被理解为包括储存一组或多组指令的单个介质或多个介质(例如,集中式或分布式数据库,和/或相关联的高速缓存及服务器)。术语“计算机可读取储存介质”也应被理解为包括:能够储存或编码一组由机器执行的指令,且使机器执行本公开内容方法中任何一者或多者的任何介质。因此,术语“计算机可读取储存介质”应被理解为包括但不限于固态存储器及光学及磁性介质。
84.前文的描述阐述了诸多具体细节,如具体系统、部件、方法等的示例,以便提供对本公开内容的数个实施方式的良好理解。然而,对于本领域技术人员而言显而易见的是,可在没有这些具体细节的情况下实施本公开内容的至少一些实施方式。在其他情况下,众所熟知的部件或方法没有被详细描述,或者以简单的方块图格式显示,以避免无谓地模糊本公开内容。因此,所阐述的具体细节仅为示例性的。特定实施方式可不同于这些示例性细节,且仍被视作在本公开内容的范围内。
85.在说明书全文中提及“一个实施方式”或“一实施方式”意味着结合该实施方式描述的特定特征、结构或特性被包括在至少一个实施方式中。因此,在本说明书各处的出现的短语“在一个实施方式中”或“在一实施方式中未必指示同一实施方式。此外,术语“或”意欲表示包含性的“或”,而非排他性的“或”。当本文使用术语“约”或“近似”时,此意欲表示所显示的标称值精确至10%以内。
86.尽管本文方法的操作以特定的次序示出及描述,但每个方法的操作次序可改变,使得某些操作可以以相反的次序执行,使得某些操作可至少部分地与其他操作同时执行。在另一实施方式中,不同操作的指令或子操作可以以间歇和/或交替的方式执行。
87.应当理解,以上描述旨在是说明性的,而非限制性的。在阅读及理解以上描述后,诸多其他实施方式对于本领域技术人员而言将是显而易见的。因此,本公开内容的范围应当参考随附权利要求书以及这些权利要求所享有的等同物的全部范围来确定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
