技术特征:
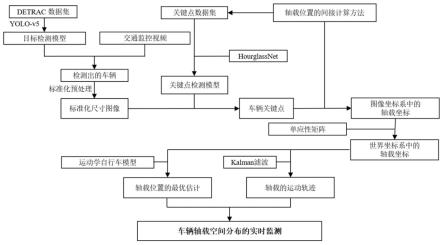
1.一种车辆轴载位置的监测方法,其特征在于,包括以下步骤:基于目标检测模型,检测实时监控画面中的车辆;提取车辆的几何特征,并建立轴载位置的间接推断方法,并以间接推断方法为依据建立车辆轴载关键点数据集和关键点检测模型;利用车辆轴载关键点数据集训练关键点检测模型;基于关键点检测模型的检测结果,通过单应性矩阵将图像坐标系中的轴载坐标变换至世界坐标系中得到世界坐标系中的轴载坐标,并利用卡尔曼滤波和车辆的运动学自行车模型对车辆轴载的运动轨迹进行最优估计,实现车辆轴载实时空间分布的监测。2.根据权利要求1所述的一种车辆轴载位置的监测方法,其特征在于,所述轴载位置的间接推断方法根据检测出的车辆一侧的轴载位置与车窗位置,基于车辆两侧的轮胎之间的距离与车辆宽度相等假设,以及车辆轮胎与地面接触点围成矩形假设,根据矩形特征计算被车身遮挡的轴载位置,实现通过单目图像得到所有轴载作用点的位置。3.根据权利要求1所述的一种车辆轴载位置的监测方法,其特征在于,所述关键点检测模型基于hourglassnet建立,hourglassnet通过若干卷积层对图像进行初步的特征提取,再通过多个编码-解码结构对图像中的特征进行二次提取,其中,一个编码-解码结构即为一个hourglass模块,通过堆叠多个hourglass模块生成热力图,从而检测图像中的关键点,前一个hourglass模块的输出直接作为下一个hourglass模块的输入。4.根据权利要求3所述的一种车辆轴载位置的监测方法,其特征在于,所述hourglass模块的基本结构包括两个分支,一个分支通过多次池化操作提取输入数组的深层次特征,并通过上采样将分辨率逐步恢复到原有的尺寸大小,另一个分支仅提取特征,不改变数组大小;hourglass模块输出时将两个分支的数组相加,使得神经网络能够结合图像中多个尺度的信息。5.根据权利要求3所述的一种车辆轴载位置的监测方法,其特征在于,训练关键点检测模型采用中间监督的方式,模型的损失函数设为每一个hourglass模块输出的特征图与标注数据之间的sigmoid的交叉熵。6.根据权利要求1所述的一种车辆轴载位置的监测方法,其特征在于,假设单应性矩阵点i在图像坐标系中的坐标为在现实坐标系中的坐标为i=1,2,3,
…
,n,n为参考点的数量,则:通过求解上述方程得到h的最小二乘解,从而确定图像坐标系与世界坐标系之间的转
换关系为:。7.根据权利要求1所述的一种车辆轴载位置的监测方法,其特征在于,所述运动学自行车模型用于对轴载作用点的轨迹进行跟踪和修正,运动学自行车模型采用四个变量来描述车辆的当前状态:中心点坐标(x,y)与速度(v),车身的姿态(θ);描述一辆汽车的轴载作用点的实时位置的变量包括:矩形的长度(h)与宽度(w),矩形中心的坐标(x,y),车身的姿态角(θ);根据刚体运动的原理,自行车模型的运动学方程为:其中,为中心点速度方向与x轴的夹角;将速度在坐标轴方向的投影定义为v
x
和v
y
,则有,则有则自行车模型的运动学方程等价为:8.根据权利要求7所述的一种车辆轴载位置的监测方法,其特征在于,根据自行车模型的等价运动学方程,为确定每辆车轴载的实时状态,需要(h,w,x,y,θ)五个参数,由于矩形的尺寸参数(h,w)不会随着时间变化,车身姿态参数θ的计算依赖h的取值,则对车辆轴载的运动轨迹进行最优估计具体包括以下步骤:基于卡尔曼滤波确定中心点坐标及其对应的运动速度的最优估计值(x
opt
,y
opt
,v
x,opt
,v
y,opt
),并实现车辆的跟踪;基于跟踪检测的结果计算矩形尺寸的最优估计值(h
opt
,w
opt
);根据自行车模型的等价运动学方程计算车身姿态的最优估计θ
opt
。9.根据权利要求8所述的一种车辆轴载位置的监测方法,其特征在于,t时刻的系统状态s
t
为中心点m的位置和速度,即s
t
=(x
t
,y
t
,v
x,t
,v
y,t
)
t
,测量状态为中心点m的位置,即m
t
=(x
t
,y
t
)
t
;根据卡尔曼滤波中的系统状态方程,车辆轴载矩形中心点的状态转移和测量方程如
下:其中,u
t
为过程噪声。10.根据权利要求9所述的一种车辆轴载位置的监测方法,其特征在于,根据卡尔曼滤波的原理,通过初始化、预测、更新三个步骤得到中心点m的坐标及其对应的运动速度的最优估计值,实现车辆的跟踪:a)初始化:当中心点m首次被检测到时,对系统状态s进行初始化处理,确定s1,其中,位置被初始化为测量值,速度根据城市道路的设计速度进行初始化;b)预测步:其中,q是u
t
的协方差矩阵,p
t
为预测值的协方差矩阵;根据预测步,利用上一帧得到的各车辆中心点m的状态信息计算当前帧m点的坐标的预测值,并计算各m点坐标预测值与实测值之间的距离,若距离小于预配置的阈值,则匹配为同一辆车;c)更新步:其中,r为观测噪声的方差;根据更新步,在每一次预测步预测完成后,对车辆状态进行更新,以实现车辆的跟踪。
技术总结
本发明涉及一种车辆轴载位置的监测方法,包括以下步骤:基于目标检测模型,检测实时监控画面中的车辆;提取车辆的几何特征,并建立轴载位置的间接推断方法,并以间接推断方法为依据建立车辆轴载关键点数据集和关键点检测模型;利用车辆轴载关键点数据集训练关键点检测模型;基于关键点检测模型的检测结果,通过单应性矩阵将图像坐标系中的轴载坐标变换至世界坐标系中得到世界坐标系中的轴载坐标,并利用卡尔曼滤波和车辆的运动学自行车模型对车辆轴载的运动轨迹进行最优估计,实现车辆轴载实时空间分布的监测。与现有技术相比,本发明具有根据单目图像即可得到所有轴载作用点的位置、轴载实时空间分布监测精度高等优点。轴载实时空间分布监测精度高等优点。轴载实时空间分布监测精度高等优点。
技术研发人员:刘超 许博强
受保护的技术使用者:同济大学
技术研发日:2022.10.30
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。