1.本发明涉及检测技术领域,尤其涉及一种基于信息熵的溢煤识别方法。
背景技术:
2.燃煤电厂输煤系统通过皮带机输送煤炭,皮带机与皮带机之间通过落煤管连接,如图1所示。按照煤流方向,煤流从上级皮带机头部流入落煤管后流出至下级皮带机的尾部。在这个过程中,由于各种原因落煤管发生堵煤,即落煤管某个位置发生煤流堵塞,从而落煤管无煤流流出而有煤流流入,落煤管被煤炭填塞满而煤流溢出。由于输煤皮带流量较大(通常大于600吨/小时),如发生堵煤,但未能及时停皮带机,将造成大量煤炭溢出,后续清理耗费大量的人力和时间。后续清理的人力和时间由溢煤量决定。
3.发生堵煤后,及时停下皮带机的先决条件是能够及时发现堵煤。现有的堵煤识别技术是使用如图2所示的阻旋式堵煤开关。该堵煤开关安装在落煤管内部,当旋转刀片周围无煤炭时,表示未发生堵煤,不发堵煤信号;当旋转刀片浸没在煤炭中时,意味着此时发生堵煤,旋转刀片堵转,发堵煤信号。在煤质较好时,阻旋式堵煤开关能有效识别堵煤。但在煤质较为粘湿的时候,落煤管内易发生煤炭搭桥式的堵煤,导致阻旋式堵煤开关识别堵煤失效。若将阻旋式堵煤开关安装在搭桥位置,则搭桥位置为煤流经过之处,易导致误报堵煤。总之,阻旋式堵煤开关不能满足煤质粘湿条件下的堵煤识别。
4.为了及时发现搭桥式堵煤,对运行人员人工监视皮带机头部视频提出了很高的要求。由于一家燃煤电厂的皮带机通常有数十台,每台皮带机头部都有视频监视,人工发现堵煤不仅极大增加了运行人员的工作强度,而且也容易发生错漏堵煤,也严重降低了输煤系统自动化程度。
5.因此,本领域的技术人员致力于开发一种新的溢煤识别方法,能够从现有的监视视频监视中自动识别溢煤现象。
技术实现要素:
6.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是如何设计一种新的溢煤识别方法,能够从现有的监视视频监视中自动识别溢煤现象。
7.为实现上述目的,本发明提供了一种基于信息熵的溢煤识别方法,所述方法包括以下步骤:
8.步骤1、对于监视区域的每一帧图像,将其转为灰度图像并用矩阵a表示;
9.步骤2、对所述矩阵a进行边缘检测,所得结果记为矩阵c;
10.步骤3、计算所述矩阵c的信息熵,得到所述灰度图像的帧熵h;
11.步骤4、所述监视区域依次产生的实时帧图像中的每一帧,经步骤1到步骤3的处理,得到帧熵序列h(1),h(2),h(3),
…
;
12.步骤5、计算所述帧熵序列的帧熵均值μ和方差σ2,确定帧熵报警的阈值h
gate
;
13.步骤6、当连续若干帧的所述帧熵超过所述阈值h
gate
时,则认为产生溢煤,发送停
机指令。
14.进一步地,将所述步骤1中的所述矩阵a记为am×n,下标m
×
n表示矩阵a的行数是m、列数是n;
15.所述矩阵a如式(1)所示:
[0016][0017]
其中,a
i,j
为所述矩阵a中的一个元素,a
i,j
的数值为0至255范围内的整数,数值越大表示亮度越高,i为1至m的整数,j为1至n的整数。
[0018]
进一步地,所述监视区域的大小不超过200
×
200,不小于50
×
50。
[0019]
进一步地,所述步骤2中包括以下子步骤:
[0020]
步骤2.1、将所述矩阵a进行均衡化处理得到矩阵b;
[0021]
步骤2.2、使用python中cv2库的canny()方法对所述矩阵b进行所述边缘检测,优选地,所述canny()方法的下界阈值取127、上界阈值取128、sobel核的大小取3;所述边缘检测的结果记为所述矩阵c;
[0022]
其中,所述矩阵a、所述矩阵b、所述矩阵c的行数和列数分别相等,所述矩阵c的各个元素也是0至255范围内的整数。
[0023]
进一步地,所述步骤2.1包括以下子步骤:
[0024]
步骤2.1.1、求式(1)中的所述矩阵a中的各元素的最大值,记为p;求式(1)中的所述矩阵a中的各元素的最小值,记为q;求式(1)中的所述矩阵a中的各元素的平均值,记为r,并令:s=max{p-r,r-q};
[0025]
步骤2.1.2、对所述矩阵a中的任意一个元素a
i,j
作如式(2)所示的变换:
[0026][0027]
其中,[x]表示x的整数部分;
[0028]
所有的b
i,j
组成所述矩阵b,如式(3)所示:
[0029][0030]
所述矩阵b的各个元素是0至255范围内的整数。
[0031]
进一步地,所述步骤3包括以下子步骤:
[0032]
步骤3.1、统计所述矩阵c中数值0,1,2,3,
…
,255出现的次数,依次记为:x(0),x(1),x(2),x(3),...,x(255);
[0033]
步骤3.2、计算所述矩阵c中数值0,1,2,3,
…
,255出现的概率,依次记为:p(0),p(1),p(2),(3),...,p(255),即:
[0034][0035]
步骤3.3、计算频率序列p(0),p(1),p(2),(3),...,p(255)的信息熵,记为所述灰度图像的所述帧熵h:
[0036][0037]
其中,当p(k)=0时,取log2p(k)=0;h是一个非负的实数。
[0038]
进一步地,所述步骤5包括以下子步骤:
[0039]
步骤5.1、计算所述帧熵序列的帧熵均值μ和方差σ2;
[0040]
步骤5.2、计算正常状态下的帧熵概率分布密度函数f(h):
[0041][0042]
其中,h为所述灰度图像的所述帧熵,μ为所述帧熵序列的平均值、σ2为所述帧熵序列的方差;
[0043]
步骤5.3、利用python的scipy库的special提供的erf()函数计算随机变量绝对值不大于z的概率,如式(7)所示:
[0044][0045]
对于式(6)描述的均值为μ、方差为σ2,服从正态分布的所述帧熵量h,作如式(8)的变换:
[0046][0047]
则有式(9):
[0048][0049]
根据python的scipy库的special提供的erf()的反函数erfinv()和预先计算获得的帧误判无溢煤概率,反向计算得出z的值;
[0050]
步骤5.4、将计算得出的z的值,代回式(8),得到帧熵报警的所述阈值h
gate
:
[0051][0052]
进一步地,帧误判溢煤概率不大于0.2069,则所述帧误判无溢煤概率为0.7931;反向计算得出z=0.8025;则式(10)具体化为:h
gate
=μ
±
1.2621σ。
[0053]
进一步地,所述步骤1中的所述监视区域为人工框选的自动监视区域。
[0054]
进一步地,所述步骤6中的所述若干帧具体为13帧。
[0055]
本发明提供的一种基于信息熵的溢煤识别方法至少具有以下技术效果:
[0056]
1、通过自动监视人工判断堵煤的视频画面的堵煤特征的位置,实现自动识别堵
煤,节约人力且避免人工监视常有的失误;
[0057]
2、通过利用既有的视频监视画面实现堵煤识别,不需要在现场新增元件,节约成本;
[0058]
3、只需正常视频求出帧熵的均值和方差,无需实际中较难找到的堵煤视频;
[0059]
4、框选视频中堵煤特征位置,减少处理图像的像素和计算量,提高运算速度;
[0060]
5、设计虚警,概率可控。
[0061]
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
[0062]
图1是输煤皮带机之间通过落煤管连接的示意图;
[0063]
图2是阻旋式堵煤开关的实拍图;
[0064]
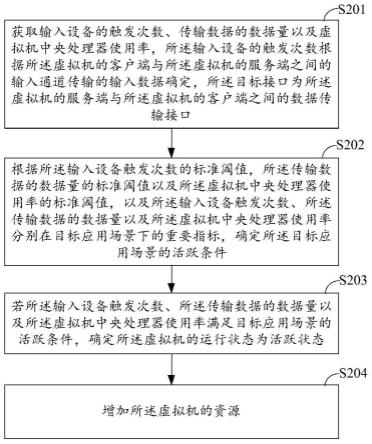
图3是本发明的基于信息熵的溢煤识别方法的一个实施例的流程示意图;
[0065]
图4是部分的帧熵趋势图;
[0066]
图5是帧熵报警的阈值h
gate
示意图;
[0067]
图6是溢煤视频图像的实拍图;
[0068]
图7是发生溢煤时的帧熵趋势图。
具体实施方式
[0069]
以下参考说明书附图介绍本发明的多个优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
[0070]
由于一家燃煤电厂的皮带机通常有数十台,每台皮带机头部都有视频监视,人工发现堵煤不仅极大增加了运行人员的工作强度,而且也容易发生错漏堵煤,也严重降低了输煤系统自动化程度。为能够自动识别溢煤,本发明提供了一种基于信息熵的溢煤识别方法,图3示出了本发明的一个实施例的流程示意图,该方法包括以下步骤:
[0071]
步骤1、对于监视区域的每一帧图像,将其转为灰度图像并用矩阵a表示;
[0072]
步骤2、对矩阵a进行边缘检测,所得结果记为矩阵c;
[0073]
步骤3、计算矩阵c的信息熵,得到灰度图像的帧熵h;
[0074]
步骤4、监视区域依次产生的实时帧图像中的每一帧,经步骤1到步骤3的处理,得到帧熵序列h(1),h(2),h(3),
…
,该帧熵序列近似服从高斯分布;
[0075]
步骤5、计算帧熵序列的帧熵均值μ和方差σ2,确定帧熵报警的阈值h
gate
;
[0076]
步骤6、当连续若干帧的帧熵超过阈值h
gate
时,则认为产生溢煤,发送停机指令。
[0077]
其中,步骤1中的监视区域为人工框选的自动监视区域。
[0078]
将步骤1中的矩阵a记为am×n,下标m
×
n表示矩阵a的行数是m、列数是n,其中,m可以不等于n;
[0079]
矩阵a的具体表示如式(1)所示:
[0080][0081]
其中,a
i,j
为矩阵a中的一个元素,a
i,j
的数值为0至255范围内的整数,数值越大表示亮度越高,i为1至m的整数,j为1至n的整数。
[0082]
为了确保计算机同时处理多个摄像头(不小于20)的实时的视频流(每个摄像头每秒25帧)足够流畅,监视区域的矩形框的大小不超过200
×
200(分辨率),不小于50
×
50;优选地,m
×
n取80
×
80。
[0083]
步骤2中包括以下子步骤:
[0084]
步骤2.1、将矩阵a进行均衡化处理得到矩阵b;
[0085]
步骤2.2、使用python中cv2库的canny()方法对矩阵b进行边缘检测,本实施例中canny()方法的下界阈值取127、上界阈值取128、sobel核的大小取3;边缘检测的结果记为矩阵c;边缘检测的原因是溢煤条件下框选区域内大量煤块将有大量边缘被检测出,而正常条件下无溢煤也就基本检测不出边缘。
[0086]
其中,矩阵a、矩阵b、矩阵c的行数和列数分别相等,矩阵c的各个元素也是0至255范围内的整数。
[0087]
步骤2.1包括以下子步骤:
[0088]
步骤2.1.1、求式(1)中的矩阵a中的各元素的最大值,记为p;求式(1)中的矩阵a中的各元素的最小值,记为q;求式(1)中的矩阵a中的各元素的平均值,记为r,并令:s=max{p-r,r-q};
[0089]
步骤2.1.2、对矩阵a中的任意一个元素a
i,j
作如式(2)所示的变换:
[0090][0091]
其中,[x]表示x的整数部分;
[0092]
记所有的b
i,j
组成的矩阵为b,如式(3)所示:
[0093][0094]
矩阵b有如下特性:同一摄像头所得的视频流即便在现场光照有变化的条件下,各帧经以上变换所得的矩阵b的各像素均值基本相等,即亮度基本不变。矩阵b的各个元素是0至255范围内的整数,满足相应的图像文件格式要求。矩阵b所对应的对比度最大,起到了图像增强的作用,有利于信号检测。
[0095]
将矩阵a进行均衡化处理后,矩阵a各元素的均值为127.5,“a中元素的最大值为255”,“a中元素的最小值为0”这两个结果至少有一个成立。均衡化的目的是确保视频各帧灰度图像在不同的光照条件下有相同的亮度,并且不同亮度间的像素的对比度尽可能大。
[0096]
步骤3包括以下子步骤:
[0097]
步骤3.1、统计矩阵c中数值0,1,2,3,
…
,255出现的次数,依次记为:x(0),x(1),x
(2),x(3),...,x(255);
[0098]
步骤3.2、计算矩阵c中数值0,1,2,3,
…
,255出现的概率,依次记为:p(0),p(1),p(2),(3),...,p(255),即:
[0099][0100]
步骤3.3、计算频率序列p(0),p(1),p(2),(3),...,p(255)的信息熵,记为灰度图像的帧熵h:
[0101][0102]
其中,当p(k)=0时,取log2p(k)=0;h是一个非负的实数。
[0103]
对于正常运行(无堵煤)运行的同一摄像头的视频至少有100万帧,帧数越多精度越高,计算每一帧的帧熵h。
[0104]
步骤5包括以下子步骤:
[0105]
步骤5.1、计算帧熵序列的帧熵均值μ和方差σ2;
[0106]
步骤5.2、计算正常状态下的帧熵概率分布密度函数f(h):
[0107][0108]
其中,h为灰度图像的帧熵,μ为帧熵序列的平均值、σ2为帧熵序列的方差;
[0109]
在工程实际应用中,视频发现皮带机车头因堵煤而产生溢煤后,皮带机越快停止越好。相应的信号跳闸回路从接收到信号到动作,时间约为1秒,而实践表明,溢煤时间在1秒以内导致的溢煤量较少,可以接受。因此,视频判断是否溢煤的时间0.5秒,视频判断时间剩余0.5秒。通常视频每秒25帧,取任意连续13帧(0.5秒帧数)都判定为溢煤作为发皮带机跳闸信号的触发条件。而设备和运行人员完全可以接受一台皮带机一年误报一次的堵煤。一年时间以365天计,一年需要检测的帧数为:
[0110]
365
×
24
×
3600
×
25=788400000
[0111]
在这788400000帧中,设帧误报的概率为p,任意连续13帧都判定溢煤即发皮带机停机信号,求满足一年误停皮带机次数期望值不大于1次的p取值范围:
[0112]
设误发皮带机停机信号的期望次数为e,则有:
[0113]
e=(788400000-13)p
13
≈788400000p
13
≤1
[0114]
解得:
[0115]
即:帧误判溢煤概率应不大于0.2069。
[0116]
式(6)无法通过积分的方法求出原函数,只能通过泰勒展开求定积分的近似解。
[0117]
步骤5.3、利用python的scipy库的special提供的erf()函数计算随机变量绝对值不大于z的概率;erf()函数的作用是求标准正态分布下随机变量绝对值不大于z的概率分布,如式(7)所示:
[0118][0119]
式(7)的数学意义是均值为0、方差为1的正态分布随机变量绝对值不大于z的概率。
[0120]
对于式(6)描述的均值为μ、方差为σ2,服从正态分布的帧熵量h,作如式(8)的变换:
[0121][0122]
则有式(9):
[0123][0124]
根据python的scipy库的special提供的erf()的反函数erfinv()和预先计算获得的帧误判无溢煤概率,反向计算得出z的值,即知道累计分布概率求z;
[0125]
步骤5.4、将计算得出的z的值,代回式(8),得到帧熵报警的阈值h
gate
:
[0126][0127]
因为帧误判溢煤概率不大于0.2069,则无溢煤的条件下,帧误判无溢煤概率为0.7931;反向计算得出z=0.8025;则式(10)具体化为:h
gate
=μ
±
1.2621σ。
[0128]
对于正常运行的皮带机监控视频,在求得正常状态的帧熵h的均值μ和方差σ2后,按式(10)确定帧判断溢煤报警的阈值h
gate
。当在线监视中的帧熵不在式(10)所确定的h
gate
上下限区间内时,即判定为帧堵煤;以任意连续13帧都判定为堵煤作为停皮带机条件,可确保一年连续运行的误停皮带机的次数不超过1次。
[0129]
正常视频和堵煤视频除了溢煤或漏煤之处有区别外,其余区域几乎完全相同,所以只需要处理发生溢煤或漏煤之处的图像局部。
[0130]
将彩色图像转为灰度图像后,图像的计算机表达是一个二维数值矩阵,矩阵的每个元素代表相应像素点的灰度,0为纯白,255为纯黑。
[0131]
图像均衡化的作用是将现场可能的不同的光照条件统一为同一亮度且对比度尽可能大。
[0132]
考虑到皮带机胶带颜色和煤炭均为黑色,灰度对图像进行行二维卷积的目的是边缘锐化,以此可以分辨出煤炭和背景的区别。经过多次测试,卷积核取python的cv2库的canny()方法对均衡化后的图像进行边缘检测,canny()方法的三个参数,下界阈值取127,上界阈值取128,sobel核的大小取3时的效果最好。
[0133]
对卷积后的图像求帧熵,累计大量(不小于100万帧)正常运行的视频,求得相应的帧熵均值和方差,利用正态分布的数学理论和python相应的库函数,确定帧熵报警的阈值。
[0134]
任意连续13帧的帧熵超阈值h
gate
,则触发皮带机跳闸指令,满足现场溢煤少量的要求。
[0135]
以下为本发明提供的一种基于信息熵的溢煤识别方法在某电厂的应用实例。
[0136]
某电厂皮带2b经常发生堵煤,现有的阻旋式堵煤开关不能可靠识别,人工监视的
方式不仅极大增加了运行人员工作强度,而且也容易错漏导致大量溢煤造成费时费力的清理。
[0137]
正常运行条件下,设定视频自动监视区域后,所得帧熵趋势图(部分)如图4所示。
[0138]
调用python的numpy库的mean()函数求得均值μ=2.6504297,调用numpy库的var()函数,求得方差σ2=0.024911199,进而σ=0.1579。由式(10)求得:
[0139]hgate
=2.6504297
±
0.1992
[0140]
相应的阈值如图5所示。
[0141]
从2022年9月3日10:30分开始监视,至2022年9月13日15:30,总共监视了22050000帧视频,其中:
[0142]
在9月8日19:57:32,视频系统发出皮带机跳闸模拟指令(未实际跳皮带机),调取相应的监控录像,画面如图6所示。
[0143]
调取相应的后台数据,所得帧熵趋势图如图7所示。
[0144]
其余时间,视频系统均未发跳闸指令,皮带机实际也未发生堵煤。
[0145]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。