基于对比学习的单基站多天线ofdm指纹定位方法
技术领域
1.本发明涉及无线电移动定位技术领域,更具体地说,涉及一种基于对比学习的单基站多天线ofdm指纹定位方法。
背景技术:
2.高精度移动位置信息获取技术是5g和后5g无线通信系统一个重要的基础功能,通过感知人群、物流、车辆及其它物联网设备的时空位置信息,可为无线网络频谱资源自动化管理、自动驾驶、智能城市照明、智慧物流、智慧安防、移动互联网社交和社会态势感知等具体应用提供数据基础。随着蜂窝基站或其他无线接入点天线数量以及频谱带宽的增加,未来无线接入点将具备更强的移动定位能力。一方面,目前基于到达时间差(tdoa)的蜂窝网移动定位方法需要多个基站间具有较高的时间同步精度,且在密集城区和室内等复杂环境下工作效果差;另一方面,基于信号到达角(aoa)的定位法需要两个以上接入点,且需要对天线阵列几何结构和射频链路相关硬件进行事先校正,部署成本高。基于信道指纹,如多天线信道状态信息(csi),接收信号的强度指示(rssi)等的匹配定位法由于不需要高时间同步精度和硬件校正精度,结合深度学习技术的发展,有望成为未来无线网络定位领域重要的方法。
技术实现要素:
3.1.发明要解决的技术问题
4.针对现有的移动设备定位方法,需要无线接入点间具有较高时间同步精度、硬件矫正精度的问题,本发明提供一种基于对比学习的单基站多天线ofdm指纹定位方法,该方法可在只使用一个多天线无线接入点,且无需硬件校正的情况下,利用无线信道大数据结合深度学习技术实现对移动设备的高精度快速定位和跟踪。
5.2.技术方案
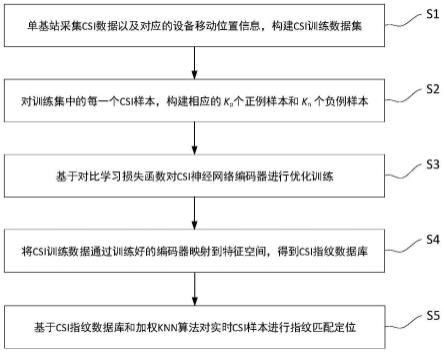
6.为达到上述目的,本发明提供的技术方案为:一种基于对比学习的单基站多天线ofdm指纹定位方法,具体包括:
7.步骤s1:基站采集来自移动设备的非实时多天线ofdm信道状态信息(csi)样本和相应的位置坐标,构建csi训练数据集;
8.步骤s2:对于训练集中的每一个csi样本,基于样本位置信息构建k
p
个正例样本和kn个负例样本;
9.步骤s3:基于对比学习损失函数对csi神经网络编码器进行优化训练;
10.步骤s4:将csi训练数据通过训练好的编码器映射到特征空间,得到csi指纹数据库;
11.步骤s5:基于csi指纹数据库和加权knn算法对实时csi样本进行指纹匹配定位。
12.作为本发明更进一步的改进,所使用的多天线ofdm信道状态信息(csi)为:
13.h=[h0,h1,
…
,h
n-1
],
[0014]
为b
×
n维复数矩阵,其中n为ofdm子载波个数,b为基站天线个数;hi为第i个子载波上的信道响应复数向量,其维度为b
×
1。
[0015]
作为本发明更进一步的改进,步骤s1中所构建的csi训练数据集可表示为其中t为样本个数,hi为第i个csi,pi为采集hi时对应的移动设备地理位置坐标。
[0016]
作为本发明更进一步的改进,针对ω中的一个csi样本ha,构建的k
p
个正例样本为地理空间中距离pa最近的k
p
个位置对应的csi样本集合,表示为集合构建的kn个负例样本集是从地理空间中距离pa大于设定阈值d
th
的位置对应的csi样本集中随机选取,表示为集合
[0017]
作为本发明更进一步的改进,步骤s3所述的csi神经网络编码器输入为原始信道状态信息h,输出为特征表示z,z为r维实向量;编码器用z=f
θ
(h)表示,其中θ为编码器的可优化参数。
[0018]
作为本发明更进一步的改进,步骤s3所采用的对比学习损失函数为:
[0019][0020]
其中为批训练集合,大小为|a|;za=f
θ
(ha)样本ha的特征表示,z
p
=f
θ
(h
p
)为ha的一个正例h
p
的特征表示,zn=f
θ
(hn)为ha的一个负例hn的特征表示,zr=f
θ
(hr)为ha的一个负例hr的特征表示;符号表示向量点积。
[0021]
作为本发明更进一步的改进,经过步骤s4得到的指纹数据库为其中θ
opt
为训练优化后的编码器参数。
[0022]
作为本发明更进一步的改进,步骤s5中对一个实时csi样本h进行指纹匹配定位的结果为:
[0023][0024]
其中k为指纹数据库ξ中在特征空间上距离点最近的k个指纹组成的集合,且所使用的距离测度为欧式距离。
[0025]
3.有益效果
[0026]
采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:
[0027]
(1)本发明提出的移动设备位置定位方法可在仅有一个无线接入点的情况下运行,各个接入点可以单独工作,降低了移动定位与无线接入时间同步的要求;
[0028]
(2)本发明支持非用户合作定位,传统的移动设备位置定位方法需要移动设备的深度协作,而本发明的方法,只要移动设备有通信需求并发送导频信号,接入点就可以通过被动地收集信道状态信息数据来实现对移动设备的定位和追踪,此过程不要用户的协作,可有效减少设备定位所需能耗。
[0029]
(3)本发明提出的移动设备位置定位方法是基于通过神经网络编码所提取的信道特征差相似度,通过对比学习方法,可使相近位置对应的信道特征具有相似性;即使在非视距条件下,相近位置对应的信道特征也是相似的,因此使得该方法可在非视线信道条件下工作。
附图说明
[0030]
图1为本发明的适用的一种移动定位场景示意图。
[0031]
图2为本发明实施例所使用的信道数据的采集区域场景地图。
[0032]
图3为本发明的csi对比学习示意图。
[0033]
图4为本发明的基于对比学习的单基站多天线ofdm指纹定位方法的流程图。
[0034]
图5为本发明所采用的编码器的结构图。
[0035]
图6为本发明实施例方法在测试集数据上的定位结果。
[0036]
图7为本发明利用实施例方法估计的位置结果。
[0037]
图8为本发明实施例方法在测试集数据上的定位误差累积分布函数。
具体实施方式
[0038]
为进一步了解本发明的内容,结合附图和实施例对本发明作详细描述。
[0039]
本说明书附图所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”等用语,亦仅为便于叙述的明了,而非用以限定可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
[0040]
实施例1
[0041]
参照图3~图5,为本发明的第一个实施例,提供了本发明的基于对比学习的单基站多天线ofdm指纹定位方法的步骤,参照图4,具体如下:
[0042]
s1:基站采集来自移动设备的非实时多天线ofdm信道状态信息(csi)样本和相应的位置坐标,构建csi训练数据集;
[0043]
在本步骤中,所使用的多天线ofdm信道状态信息(csi)为h=[h0,h1,
…
,h
n-1
],为b
×
n=56
×
924维复数矩阵。
[0044]
具体的,本步骤中构建的csi训练数据集可表示为采集的样本个数t=4096,hi为第i个csi,pi为采集hi时对应的移动设备经纬度坐标。
[0045]
s2:对于训练集中的每一个csi样本,基于样本位置信息构建k
p
个正例样本和kn个负例样本;
[0046]
参照图3,将信道数据集均分为正例、锚点、负例的信道样本,在本步骤中,针对ω中的一个csi样本ha,从ω中选取k
p
=16个正例样本,为地理空间中距离pa最近的16个位置对应的csi样本集合,表示为集合构建的kn=64个负例的样本集,从距
离pa大于设定阈值d
th
=25m的位置对应的csi样本中随机选取,表示为集合
[0047]
s3:基于对比学习损失函数对csi神经网络编码器进行优化训练;
[0048]
在本步骤中,csi神经网络编码器输入为原始信道状态信息h,输出为特征表示z,z为32维实向量;编码器用z=f
θ
(h)表示,其中θ为编码器的可优化参数。
[0049]
进一步的,所采用的编码器结构如图5所示;编码器包含一个预处理层,4个卷积层,两个批归一化(batch normalization,bn)层和两个全连接层;激活函数使用tanh。由于编码器只能处理实数,首先将csi数据h转换为2
×
56
×
924维的实数张量作为编码器输入;预处理层计算频域自相关矩阵c=hhh,并提取c上对角块元素的实部,下对角块元素的虚部,以及对角元素的实部(对角元素虚部为0),组成一个56
×
56大小的实数矩阵;第1个卷积层卷积核大小为5,其他3个卷积层卷积核大小为3。
[0050]
此外,本步骤中编码器训练过程所采用的对比学习损失函数为:
[0051][0052]
其中,为批训练(batch)集合,大小为|a|=32;za=f
θ
(ha)样本ha的特征表示,z
p
=f
θ
(h
p
)为ha的一个正例h
p
的特征表示,zn=f
θ
(hn)为ha的一个负例hn的特征表示,zr=f
θ
(hr)为ha的一个负例hr的特征表示;符号表示向量点积;参数τ设为2。
[0053]
s4:将csi训练数据通过训练好的编码器映射到特征空间,得到csi指纹数据库;
[0054]
具体的,经过本步骤得到的指纹数据库为其中θ
opt
为训练优化后的编码器参数。
[0055]
s5:基于csi指纹数据库和加权knn算法对实时csi样本进行指纹匹配定位。
[0056]
具体的,经过本步骤对一个实时csi样本h进行指纹匹配定位的结果为:
[0057][0058]
其中,k为指纹数据库ξ中在特征空间上距离点最近的k=4个指纹组成的集合,且所使用的距离测度为欧式距离。
[0059]
在本实施例中,对csi神经网络编码器进行优化训练时,训练中采用adam优化器更新编码器参数θ,迭代轮次(epoch)次数为20,初始学习速率设为0.0005,每5次迭代后学习速率减半。
[0060]
实施例2
[0061]
本发明的第二个实施例,基于上一个实施例,为了更好地证明本发明的效果,下面结合仿真验证对本发明的方法达到的效果进行描述。
[0062]
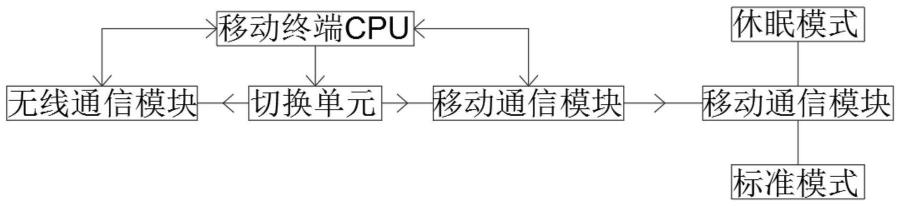
具体的,参照图1,为本发明适用的一种单基站多天线ofdm移动定位场景。其中,基站天线个数为b=56,移动终端为单天线,ofdm子载波个数为n=924,载波频率为1.27ghz。
[0063]
相应的,图2为本发明实施例所使用的信道数据的采集区域实际场景地图,白色圆
点为基站所处位置,移动终端在图中高亮区域内移动。
[0064]
进一步的,在经过本发明的方法后,参照图7为利用本发明方法估计的位置结果图,图6则是883个测试样本的实际位置示意图。结合图6和图7,可得出图8所示的在测试集数据上的定位误差累积分布函数(cdf)曲线,其横坐标为定位误差(m)。最终得出,所有测试样本平均定位误差为35.7m,其中65%的测试样本定位误差小于25m。
[0065]
通过本实施例仿真验证,可以发现利用本发明的方法在单基站情况下可取得较好的定位性能,且无需进行硬件校正。本发明充分利用了神经网络强大的学习能力,可从原始csi信息中学习稳健的与终端位置相关的信道指纹特征,结合简单的knn匹配算法就可以取得较好的定位精度。
[0066]
需说明的是,在该实施例中,所使用的信道数据来自公开数据。
[0067]
以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。