1.本发明涉及控制装置、移动体、控制方法和计算机可读存储介质。
背景技术:
2.在专利文献1中记载了基于位于分发区域内的多个移动体的位置信息,选择并决定在检测到分发区域中的危险事件的移动体的后方行驶的后续移动体作为经由移动通信的基站的单播发送对象的移动体。
3.专利文献1:日本特开2020-102822号公报
技术实现要素:
4.在本发明的第一方式中,提供了一种控制装置。控制装置具备接收控制部,所述接收控制部进行如下控制:当所述移动体位于第一位置时接收包含其他移动体通过图像识别确定的多个位置坐标在内的风险区域的存在信息。控制装置具备判断部,所述判断部基于包含在由接收控制部进行了接收的控制的风险区域的存在信息中的多个位置坐标来判断移动体是否位于风险区域的附近。控制装置具备发送控制部,所述发送控制部进行如下控制:当判断部判断为移动体位于风险区域的附近时发送与移动体的存在有关的信息。控制装置具备执行移动体的控制的控制部。发送控制部进行如下控制:当移动体位于比第一地点更靠近风险区域的第二地点时,基于接收控制部进行了接收的控制的风险区域的存在信息,将请求与风险区域有关的信息的风险区域信息发送到移动体的外部。控制部基于来自外部装置的对风险区域信息的响应信息执行移动体的控制。
5.风险区域的存在信息可以包含表示风险区域的有效期间的信息。发送控制部可以进行如下控制:以是风险区域的有效期间内为条件,将风险区域信息发送到移动体的外部。
6.风险区域的存在信息可以包含表示确定了风险区域的其他移动体的移动方向的信息。发送控制部可以进行如下控制:以移动体的移动方向与识别到风险区域的其他移动体的移动方向匹配为条件,将风险区域信息发送到移动体的外部。
7.第二地点可以是沿着移动体的移动方向距离风险区域仅小于预定距离的近前的地点。
8.控制部可以执行移动体的驾驶辅助或针对移动体的乘员的警告。
9.发送控制部可以进行如下控制:使风险区域信息中包含风险区域的多个位置坐标,以不指定目的地的方式进行发送。
10.接收控制部可以进行如下控制:从管理多个其他移动体通过图像识别确定的风险区域的存在信息的服务器接收风险区域的存在信息。
11.服务器可以管理一个以上的终端的当前位置信息。发送控制部可以将风险区域信息发送到服务器。接收控制部可以进行如下控制:从服务器接收包含存在于风险区域内或从风险区域开始的预定范围内的终端的当前位置信息的响应信息,作为对风险区域信息的响应信息。
12.移动体可以不具备用于识别移动体的移动方向的图像的图像识别装置。
13.当接收到风险区域的存在信息时,发送控制部可以不发送针对风险区域的存在信息的响应信息。
14.移动体可以是车辆。
15.在本发明的第二方式中,提供了一种移动体。移动体具备上述控制装置。
16.在本发明的第三方式中,提供了一种控制方法。控制方法具有进行如下控制的步骤:当所述移动体位于第一位置时接收包含其他移动体通过图像识别确定的多个位置坐标在内的风险区域的存在信息。控制方法具有基于包含在风险区域的存在信息中的多个位置坐标来判断移动体是否位于风险区域的附近的步骤。控制方法具有进行如下控制的步骤:当判断为移动体位于风险区域的附近时发送与移动体的存在有关的信息。控制方法具有执行移动体的控制的步骤。在进行发送与移动体的存在有关的信息的控制的步骤中,具有进行如下控制的步骤:当移动体位于比第一地点更靠近风险区域的第二地点时,基于风险区域的存在信息,将请求与风险区域有关的信息的风险区域信息发送到移动体的外部。在执行移动体的控制的步骤中,具有基于来自外部装置的对风险区域信息的响应信息执行移动体的控制的步骤。
17.在本发明的第四方式中,提供了一种程序。程序使计算机执行进行如下控制的步骤:当所述移动体位于第一位置时接收包含其他移动体通过图像识别确定的多个位置坐标在内的风险区域的存在信息。程序使计算机执行基于包含在风险区域的存在信息中的多个位置坐标来判断移动体是否位于风险区域的附近的步骤。程序使计算机执行进行如下控制的步骤:当判断为移动体位于风险区域的附近时发送与移动体的存在有关的信息。程序使计算机执行执行移动体的控制的步骤。在进行发送与移动体的存在有关的信息的控制的步骤中,具有进行如下控制的步骤:当移动体位于比第一地点更靠近风险区域的第二地点时,基于风险区域的存在信息,将请求与风险区域有关的信息的风险区域信息发送到移动体的外部。在执行移动体的控制的步骤中,具有基于来自外部装置的对风险区域信息的响应信息执行移动体的控制的步骤。
18.另外,上述发明的概要没有列举本发明的全部必要特征。另外,这些特征组的子组合也可以是发明。
附图说明
19.图1示意性示出警报系统10的使用场景。
20.图2示出车辆20到达区域110附近时的状态。
21.图3示出车辆20的系统结构。
22.图4概念性示出风险区域的位置信息。
23.图5示意性示出与在车辆60、车辆20以及终端82中执行的控制方法有关的处理流程。
24.图6示意性示出与车辆60、车辆20、服务器52和终端82执行的其他形式的控制方法有关的处理流程。
25.图7示出计算机2000的示例。
具体实施方式
26.以下,通过发明的实施方式说明本发明,但是以下的实施方式不限定所要求保护的发明。另外,在实施方式中说明的特征组合并非全部是发明的解决手段所必需的。
27.图1示意性示出警报系统10的使用场景。警报系统10警报车辆20、车辆60、终端82、基站50和服务器52。
28.车辆20和车辆60是移动体的示例。车辆20具备控制装置24。控制装置24具有通信功能。车辆60具备传感器69和控制装置64。传感器69包含摄像机而构成。控制装置64具备由传感器69获取的信息的处理功能和通信功能。
29.终端82是行人80持有的终端。终端82例如是智能手机等的便携式终端。基站50是移动通信的基站。服务器52是连接到基站50的服务器。服务器52可以包含例如mec服务器等的边缘计算服务器。
30.在图1中,车辆20和车辆60是沿着道路70行驶的车辆。车辆90是停放在道路70上的车辆。车辆60在车辆20的前方以与车辆20相同的前进方向行驶。
31.对于车辆60来说,与停放中的车辆90相比车辆60的前进方向侧的区域110是从车辆60的位置难以视觉确认的区域。控制装置64根据由传感器69获取的前进方向上的图像,检测从车辆60看不见的区域110作为风险区域。控制装置64通过无线信号广播发送包含区域110的位置信息的风险区域的存在信息。
32.终端82在接收到从控制装置64发送的风险区域的存在信息时,在终端82的当前位置在风险区域内的情况下,通过终端82的hmi(human machine interface;人机界面)功能输出警报信息。此外,终端82通过无线信号发送包含终端82的当前位置的响应信息,作为对存在信息的响应信息。车辆60的控制装置64在接收到来自终端82的响应信息时,判断为终端82的当前位置处于风险区域内,通过控制装置64的hmi功能输出警报,并且进行车辆60的行驶辅助。
33.当接收到从控制装置64发送的风险区域的存在信息时,车辆20的控制装置24存储存在信息中包含的区域110的位置信息。控制装置24判断在接收到风险区域的存在信息之后的预定期间内车辆20是否到达控制装置24存储的区域110附近。
34.图2示出车辆20到达区域110附近时的状态。当车辆20到达距前方的区域110的位置预定距离的位置时,控制装置24通过无线信号广播发送包含存储的区域110的位置信息的风险区域信息。当终端82接收到从控制装置24发送的风险区域信息时,在终端82的当前位置在风险区域内的情况下,通过终端82的hmi(human machine interface;人机界面)功能输出警报信息。此外,终端82通过无线信号发送包含终端82的当前位置的响应信息,作为对风险区域信息的响应信息。控制装置24在接收到来自终端82的响应信息时,判断为终端82的当前位置处于风险区域内,通过控制装置24的hmi功能输出警报,并且进行车辆20的行驶辅助。
35.另外,服务器52管理从控制装置64和控制装置24定期发送的车辆60和车辆20的当前位置信息。当服务器52接收到从车辆60的控制装置64发送的风险区域的存在信息时,存储存在信息中包含的区域110的位置信息。此外,服务器52确定在发送存在信息的车辆60后方行驶的车辆20,并将包含区域110的位置信息的存在信息发送到车辆20。由此,控制装置24可以从服务器52获取风险区域的存在信息。因此,在车辆60发送了存在信息时,即使行驶
在车辆20不能接收从控制装置64发送的存在信息的位置,控制装置24也能够在到达区域110附近之前从服务器52接收存在信息。
36.由此,控制装置24可以预先接收并存储从其他车辆60或服务器52接收的风险区域的位置信息,并且在车辆20到达风险区域附近时发送风险区域信息。由此,控制装置24即使不具有通过摄像机等传感部件识别风险区域的功能,也能够利用通过无线通信功能从其他车辆60或服务器52接收到的风险区域,使终端82输出警报,或进行车辆20的行驶辅助。此外,即使在车辆60发送风险区域存在信息的定时行人80没有在风险区域内行走,在后续的车辆20到达风险区域附近的定时行人80也可能在风险区域内行走。根据警报系统10,当在车辆20到达风险区域附近的定时在风险区域中存在行人80时,可以使行人80的终端82发出警报输出,并进行车辆20的行驶辅助。另外,在本实施方式中,风险区域可以是车辆20或控制装置24所识别的与外部环境有关的状态的识别。例如,风险区域可以是对行人80或车辆具有风险的区域。例如,风险区域可以是对于行人80或车辆需要进行安全确认的区域。
37.另外,在本实施方式中,为了简单易懂地进行说明,列举了判断风险区域内是否存在行人的情况。行人是指在道路上可以不依靠车辆通行的人。行人包含通过轮椅等在道路上通行的人。但是,不限于行人,可以判断行人以外的人或其他车辆等任意移动体是否存在于风险区域内。作为行人以外的人可以包含乘坐在停车中的车辆上的人。
38.图3示出车辆20的系统结构。车辆20具备传感器29、控制装置24、通信装置48和信息输出装置40。
39.传感器29具备gnss接收部25和车速传感器26。gnss接收部25接收从gnss(global navigation satellite system;全球定位卫星系统)卫星发送的电波。gnss接收部25基于从gnss卫星接收的信号生成表示车辆20的当前位置的信息。车速传感器26检测车辆20的车速。
40.通信装置48承担与终端82和服务器52之间的通信。通信装置48可以在与终端82之间进行基于lte-v2x pc5的无线通信。
41.信息输出装置40是输出警报信息的装置。信息输出装置40可以具有hmi功能。信息输出装置40可以包含平视显示器和导航系统。信息输出装置40也可以是车辆20的乘员持有的便携式终端。信息输出装置40可以包含通过声音输出警报信息的声音输出装置。
42.控制装置24具备控制部200和存储部280。控制部200例如由包含处理器的运算处理装置等的电路来实现。存储部280具备非易失性存储介质而实现。控制部200使用存储在存储部280中的信息来执行处理。控制部200可以由ecu(electronic control unit;电子控制单元)来实现,该ecu具备具有cpu、rom、ram、i/o和总线等的微计算机。
43.控制部200具备判断部230、控制部208、发送控制部250和接收控制部260。发送控制部250和接收控制部260通过控制通信装置48来控制与终端82和服务器52之间的通信。另外,可以采用控制部200不具有图3所示的功能块中的一部分功能的形式。例如,可以采用仅在控制部200中实现一部分功能,而将其他功能作为传感器29等的其他电路的功能来实现的形式。
44.当车辆20位于第一地点时,接收控制部260进行如下控制:接收包含其他车辆20通过图像识别确定的多个位置坐标的风险区域的存在信息。接收控制部260可以接收从其他车辆20广播发送的存在信息。接收控制部260可以进行如下控制:从管理多个其他车辆通过
图像识别确定的风险区域的存在信息的服务器接收风险区域的存在信息。
45.风险区域的多个位置坐标可以包含风险区域的多个经纬度坐标。多个位置坐标可以是表示风险区域的地理位置的坐标信息。当风险区域为多边形时,多个位置坐标可以是多边形顶点的坐标信息。风险区域的位置坐标可以包含一个坐标信息和距该坐标信息表示的位置的距离信息。例如,可以包含风险区域的特定地点的位置坐标和表示以该地点为基准的风险区域的范围的距离信息。
46.判断部230基于包含在由接收控制部260进行了接收的控制的风险区域的存在信息中的多个位置坐标,判断车辆20是否位于风险区域附近。判断部230可以通过基于风险区域的位置坐标、由gnss接收部25生成的车辆20的当前位置和由车速传感器26检测到的车辆20的车速,判断车辆20是否在预定时间内到达风险区域的位置,来判断车辆20是否在风险区域附近。
47.当判断部230判断车辆20位于风险区域附近时,发送控制部250执行用于发送与车辆20的存在有关的信息的控制。具体地,当车辆20位于比第一地点更靠近风险区域的第二地点时,发送控制部250执行如下控制:基于由接收控制部260进行了接收的控制的风险区域的存在信息,向车辆20的外部发送请求与风险区域有关的信息的风险区域信息。第二地点可以是沿车辆20的移动方向距前方的风险区域小于预定距离的地点。
48.发送控制部250进行如下控制:将风险区域的多个位置坐标包含在风险区域信息中,以不指定目的地的方式进行发送。另外,发送控制部250可以通过广播发送风险区域信息。另外,在本实施方式中,在发送控制部250的控制下“发送到车辆20的外部”可以是通过广播方式向未指定目的地的周围的通信设备发送。“发送到车辆20的外部”可以是以使得车辆20之外的通信设备能够接收所发送的信息的方式进行发送,而不管车辆20内的通信设备是否能够接收所发送的信息。
49.控制部208基于来自外部装置的对风险区域信息的响应信息执行车辆20的控制。由此,控制部208基于响应信息执行车辆20的控制。这里,外部装置可以是终端82。如后所述,外部装置也可以是管理终端82的当前位置信息的服务器52。
50.控制部208可以基于响应信息执行车辆20的驾驶辅助或对车辆20的乘员的警告。例如,当信息输出装置40具有平视显示器时,控制部208可以使车辆20的平视显示器输出用于形成作为表示风险区域中存在行人的警报信息的标记的光。控制部208可以使平视显示器输出用于在与行人所在的风险区域的位置相对应的显示区域中形成标记的光。控制部208可以将用于形成标记的光投影到设置在车辆20的风挡上的反射构件上。另外,控制部208也可以通过声音或文字输出警报信息。另外,控制部208可以通过车辆20所具备的ecu控制车辆20的行驶。
51.风险区域的存在信息可以包含表示风险区域的有效期间的信息。发送控制部250可以进行以是风险区域的有效期间内为条件将风险区域信息发送到车辆20的外部的控制。例如,车辆60可以包含风险区域的存在信息来发送。
52.风险区域的存在信息可以包含表示确定了风险区域的其他车辆60的移动方向的信息。发送控制部250可以进行如下控制:以车辆20的移动方向与识别出风险区域的其他车辆60的移动方向匹配为条件,将风险区域信息发送到车辆20的外部。
53.车辆20不具备用于识别车辆20的移动方向上的图像的图像识别装置。另外,在本
实施方式中,车辆20不具备图像识别装置。然而,车辆20也可以具备用于识别车辆20的移动方向上的图像的图像识别装置。另外,当接收到风险区域的存在信息时,发送控制部250可以不发送对风险区域的存在信息的响应信息。
54.另外,在服务器52管理一个以上的终端的当前位置信息的情况下,发送控制部250可以向服务器52发送风险区域信息。接收控制部260可以进行如下控制:从服务器52接收包含存在于风险区域内或距风险区域的预定范围内的终端82的当前位置信息的响应信息,作为对风险区域信息的响应信息。
55.图4概念性地示出了风险区域的位置信息。图4表示风险区域用多边形表示的情况。
56.控制装置64计算表示区域110的外形的四个地点111、地点112、地点113和地点114各自的坐标,作为风险区域的位置信息。区域110是通过连接地点111、地点112、地点113和地点114的坐标而形成的封闭区域。控制装置64将地点111、地点112、地点113和地点114各自的坐标与赋予给区域110的区域id建立对应地存储。控制装置64发送包含区域id和表示区域110的坐标的存在信息。
57.在终端82接收到存在信息的情况下,终端82判断存在信息中包含的坐标表示的4个地点包围的区域内是否包含终端82的当前位置。当终端82的当前位置包含在4个地点包围的区域中时,终端82将包含终端82所在的风险区域的区域id的响应信息发送到存在信息的发送源的车辆60。
58.在车辆20中,若控制装置24接收到从控制装置64发送的存在信息,则将地点111、地点112、地点113及地点114的各个坐标与控制装置24决定的区域id建立对应地存储。当地点111、地点112、地点113和地点114中在车辆20的前进方向上最近的地点与车辆20的当前位置之间的距离小于预定距离时,控制装置24发送包含地点111、地点112、地点113和地点114的各个坐标和区域id的风险区域信息。
59.若终端82接收到风险区域信息,则与接收到存在信息的情况相同,终端82判断在由包含在风险区域信息中的坐标所表示的4个地点包围的区域内是否包含终端82的当前位置。当终端82的当前位置包含在4个地点包围的区域中时,终端82将包含终端82所在的风险区域的区域id的响应信息发送到风险区域信息的发送源的车辆20。
60.另外,当风险区域为圆形时,风险区域的位置信息可以包含风险区域的中心地点的坐标信息和风险区域的直径信息。当风险区域为椭圆形时,风险区域的位置信息可以包含风险区域的中心地点的坐标信息和长径、短径以及方位角信息。当风险区域为多边形时,风险区域的位置信息可以包含成为多边形的基准的地点的坐标信息和风险区域的宽度和高度等边长信息。
61.图5示意性示出了与在车辆60、车辆20以及终端82中执行的控制方法有关的处理流程。
62.在s402中,车辆60的控制装置64根据由传感器69所具备的摄像机拍摄的图像确定风险区域。例如,将车辆60的前进方向的看不见区域确定为风险区域。具体而言,控制装置64可以通过根据车辆60上搭载的摄像机拍摄的图像识别对象物,来判定看不见的区域。对象物例如是其他车辆、大楼等的建筑物、街道树等。看不见的区域是例如从车辆60的位置观察时,由于被其他车辆、建筑物、街道树等立体物遮挡而产生遮挡的区域的位置信息。控制
装置64可以基于图像信息和地图信息,确定看不见的区域。
63.在s404中,控制装置64计算风险区域的坐标。控制装置64基于车辆60的当前位置、车辆60的行驶方向和由传感器69测量的到其他车辆90的距离计算风险区域的坐标。
64.在s406中,控制装置64通过通信装置48发送风险区域的存在信息。存在信息可以包含区域id、风险区域的坐标信息、存在信息的发送源信息、风险区域的有效期间、表示车辆60的行驶方向的方向信息和车辆60的当前位置信息。区域id是用于唯一地确定在s402中确定的风险区域的识别信息。区域id可以是控制装置64决定的识别信息。发送源信息是用于唯一地确定作为存在信息的发送源的车辆60的识别信息。
65.当终端82接收到从车辆60发送的存在信息时,终端82判断终端82的当前位置是否位于由包含在风险区域信息中的坐标表示的风险区域内(s420)。当终端82的当前位置在风险区域内时,在s422中,终端82向车辆60发送表示在风险区域内存在行人的响应信息。此外,在s424中,终端82进行对行人80的警报输出。在s408中,当从终端82接收到的响应信息表示风险区域内存在行人时,车辆60的控制装置64进行警报输出。
66.在车辆20中,接收控制部260若接收到在s406中从控制装置64发送的存在信息,则将存在信息中包含的风险区域的坐标、有效期间、车辆60的方向信息、以及车辆60的当前位置信息存储到存储部280中(s442)。在s444中,判断部230基于存储在存储部280中的风险区域的坐标,持续地判断车辆20是否已经接近风险区域。在判断部230判断车辆20接近了风险区域的情况下,发送控制部250发送包含存储在存储部280中的风险区域的坐标的风险区域信息(s446)。
67.另外,发送控制部250可以以当前时刻是风险区域的有效期间内为条件来发送风险区域信息。发送控制部250可以以存储在存储部280中的车辆60的行驶方向与车辆20的当前的行驶方向所成的角度是预定角度以内为条件来发送风险区域信息。发送控制部250可以以存储在存储部280中的车辆60的当前位置信息与车辆20的当前位置信息之间的距离是预定距离之内为条件来发送风险区域信息。
68.当终端82接收到从车辆20发送的风险区域信息时,终端82判断终端82的当前位置是否位于由包含在风险区域信息中的坐标表示的风险区域内(s426)。当终端82的当前位置在风险区域内时,在s428中,终端82将表示在风险区域内存在行人的响应信息发送给车辆20。另外,在s430中,终端82进行对行人80的警报输出。在s446中,车辆20的控制部208在从终端82接收到的响应信息表示风险区域内存在行人的情况下,通过信息输出装置40进行警报输出。
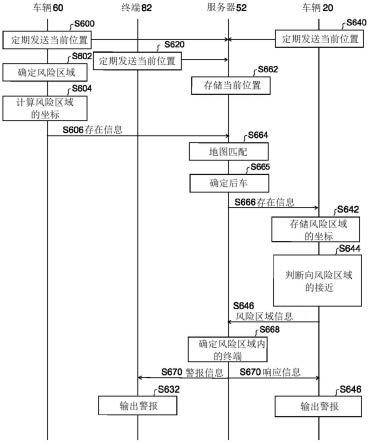
69.图6示意性示出了与车辆60、车辆20、服务器52和终端82执行的其他形式的控制方法有关的处理流程。图6示出了服务器52管理风险区域的形式的处理流程。
70.在s600中,控制装置64定期地将车辆60的当前位置发送到服务器52。另外,在s640中,控制装置24的发送控制部250定期地向服务器52发送车辆20的当前位置。在s620中,终端82定期地向服务器52发送终端82的当前位置。在s662中,服务器52存储车辆60、车辆20和终端82的位置信息。
71.在s602中,车辆60的控制装置64根据由传感器69所具备的摄像机拍摄的图像确定风险区域。在s604中,控制装置64计算风险区域的坐标。s602和s604的处理分别与s402和s404的处理相同。
72.在s606中,控制装置64通过通信装置48发送风险区域的存在信息。如结合图5说明的那样,存在信息可以包含区域id、风险区域的坐标、存在信息的发送源信息、风险区域的有效期间、表示车辆60的行驶方向的方向信息、车辆60的当前位置信息。
73.在s664中,服务器52若接收到从控制装置64发送的存在信息,则使用s662中存储的车辆20和车辆60的位置信息和存在信息中包含的风险区域的坐标进行地图匹配,确定地图上的车辆20和车辆60的位置和风险区域的坐标。随后,在s665中,服务器52基于地图匹配的结果和存在信息确定车辆60的后车。例如,服务器52确定在车辆60发送存在信息时车辆60行驶的路段上行驶的车辆中的、在车辆60的后方沿着该路段与车辆60相同的方向行驶的车辆,作为车辆60的后车。服务器52若在s665中将车辆20确定为后车,则在s666中,将风险区域的存在信息发送到车辆20。风险区域的存在信息可以包含风险区域的坐标、有效期间、车辆60的方向信息、以及当车辆60确定风险区域时的车辆60的当前位置信息。
74.在车辆20中,如果接收到在s666中从服务器52发送的存在信息,则接收控制部260将存在信息中包含的风险区域的坐标、有效期间、车辆60的方向信息、以及车辆60的当前位置信息存储在存储部280中(s642)。在s644中,判断部230基于存储在存储部280中的风险区域的坐标,持续地判断车辆20是否已经接近风险区域。当判断部230判断车辆20接近了风险区域时,发送控制部250发送包含存储在存储部280中的风险区域的坐标的风险区域信息(s646)。
75.另外,发送控制部250可以以当前时刻是风险区域的有效期间内为条件来发送风险区域信息。发送控制部250可以以存储在存储部280中的车辆60的行驶方向与车辆20的当前的行驶方向所成的角度是预定角度以内为条件来发送风险区域信息。发送控制部250可以以存储在存储部280中的车辆60的当前位置信息与车辆20的当前位置信息之间的距离是预定距离之内为条件来发送风险区域信息。
76.服务器52若接收到从车辆20发送的风险区域信息,则基于由服务器52管理的终端82的当前位置和风险区域信息,确定存在于由包含在风险区域信息中的坐标表示的风险区域内的终端82(s668)。在s670中,服务器52将警报信息发送到s668中确定的终端82,并将表示风险区域中存在行人的响应信息发送到车辆20。在s646中,车辆20的控制部208若从服务器52接收到响应信息,则通过信息输出装置40进行警报输出。此外,在s632中,当从服务器52接收到警报信息时,终端82进行警报输出。
77.另外,在s646中,发送控制部250可以如结合图5的s446所述那样,以不指定目的地的方式通过广播发送风险区域信息。在这种情况下,如结合图5的s426、s428、s430和s446所述那样,终端82可以在接收到风险区域信息时判断终端82的当前位置是否在风险区域内,并在判断终端82的当前位置在风险区域内时向车辆20发送响应信息。此时,车辆20的控制部208在至少从服务器52和终端82接收到响应信息的情况下,可以进行警报输出。另外,当判断为终端82的当前位置处于风险区域内时,终端82可以进行警报输出。
78.另外,车辆60的控制装置64在s606中,可以以不指定目的地的方式通过广播发送存在信息。此时,如结合图5的s420、s422、s408和s424所述那样,终端82在接收到存在信息时,可以判断终端82的当前位置是否在风险区域内,在判断终端82的当前位置在风险区域内时,向车辆60发送响应信息。在这种情况下,当从终端82接收到响应信息时,控制装置64可以进行警报输出。另外,当判断为终端82的当前位置处于风险区域内时,终端82可以进行
警报输出。
79.另外,服务器52在s606中接收到风险区域的存在信息时,可以在s664中进行地图匹配后,确定存在于风险区域内的终端82,向确定的终端82发送警报信息,并且向车辆60发送表示风险区域内存在行人的响应信息。在这种情况下,车辆60的控制装置64可以在从服务器52接收到响应信息时进行警报输出,终端82可以在从服务器52接收到警报信息时进行警报输出。
80.另外,虽然结合图6说明了服务器52从车辆60获取风险区域的存在信息,但服务器52也可以不限于车辆60而从任意方向上行驶的任意多辆车辆获取风险区域的存在信息。另外,服务器52也可以存储由于建筑物、街道树等固定的立体物而成为看不见区域的预先确定的固定的风险区域的坐标信息,向朝向该风险区域行驶的车辆发送风险区域的存在信息。
81.如上所述,根据警报系统10,控制装置24可以存储从其他车辆60或服务器52接收到的风险区域的位置信息,并且在车辆20到达风险区域附近时发送风险区域信息。由此,控制装置24即使不具有通过摄像机等传感部件识别风险区域的功能,只要具有无线通信功能,也能够使终端82输出警报或进行车辆20的行驶辅助。此外,当在车辆20到达风险区域附近的定时存在行走在危险位置的行人80时,可以使行人80的终端82进行警报输出,并进行车辆20的行驶辅助。
82.另外,控制装置24以及控制装置64与终端82之间的通信可以通过cellular-v2x中的近场直接通信来执行。作为cellular-v2x中的近场直接通信,包含lte-v2x pc5和5g-v2x pc5等通信方式。作为直接通信,也可以采用使用wi-fi(注册商标)、dsrc(dedicated short range communications)的形式。控制装置24和控制装置64可以经由基站与终端82通信。另外,控制装置24以及控制装置64与终端82之间的通信除了cellular-v2x、dsrc(注册商标)以外,还可以采用bluetooth(注册商标)等任意的直接通信方式。控制装置24和控制装置64也可以使用its(intelligent transport systems:智能交通系统)所具备的通信基础设施与终端82之间直接通信。
83.另外,车辆20和车辆60是运输设备的示例。运输设备包含小汽车、公共汽车等的汽车、鞍乘式车辆、自行车等。另外,作为车辆20的识别对象的移动体,除了人以外,还包含小汽车、公共汽车等汽车、鞍乘式车辆、自行车等运输设备。
84.图7示出了可以全部或部分地体现本发明的多个实施方式的计算机2000的示例。安装至计算机2000的程序能够使计算机2000作为实施方式涉及的控制装置24等的装置或该装置的各单元发挥功能,执行与该装置或该装置的各单元相关联的操作,以及/或者执行实施方式涉及的工序或该工序的步骤。为了使计算机2000执行本说明书所述的处理流程以及与框图的功能块中的几个或全部相关联的特定的操作,这样的程序可以由cpu2012执行
85.基于本实施方式的计算机2000包含cpu2012以及ram2014,它们通过主控制器2010而相互连接。计算机2000还包含rom2026、闪存2024、通信接口2022以及输入/输出芯片2040。rom2026、闪存2024、通信接口2022以及输入/输出芯片2040经由输入/输出控制器2020与主控制器2010连接。
86.cpu2012按照rom2026以及ram2014内保存的程序进行动作,由此控制各单元。
87.通信接口2022经由网络与其他的电子设备通信。闪存2024保存由计算机2000内的
cpu2012使用的程序以及数据。rom2026保存被激活时由计算机2000执行的启动程序等、以及/或依存于计算机2000的硬件的程序。输入/输出芯片2040还可以经由串行端口、并行端口、键盘端口、鼠标端口、监视器端口、usb端口、hdmi(注册商标)端口等的输入/输出端口,将键盘、鼠标以及监视器等各种输入/输出单元与输入/输出控制器2020连接。
88.程序经由cd-rom、dvd-rom、或u盘那样的计算机可读介质或网络而被提供。ram2014、rom2026、或闪存2024是计算机可读介质的例子。程序被安装至闪存2024、ram2014或rom2026,由cpu2012执行。在这些程序内记述的信息处理被计算机2000读取,实现程序和上述各种类型的硬件资源之间的协作。装置或方法可以通过遵从计算机2000的使用而实现信息的操作或处理来构成。
89.例如,在计算机2000和外部设备之间执行通信的情况下,cpu2012可以执行加载到ram2014的通信程序,基于通信程序中记述的处理,对通信接口2022指示通信处理。通信接口2022在cpu2012的控制下,对向ram2014以及闪存2024那样的记录介质内提供的发送缓冲处理区域中保存的发送数据进行读取,将读取的发送数据向网络发送,并将从网络接收的接收数据写入至向记录介质上提供的接收缓冲处理区域等。
90.另外,cpu2012可以使得闪存2024等那样的记录介质中保存的文件或数据库的全部或所需的部分被读取至ram2014,并对ram2014上的数据执行各种处理。cpu2012接着将处理后的数据写回至记录介质。
91.可以将各种类型的程序、数据、表格以及数据库那样的各种信息保存至记录介质,并施加至信息处理。cpu2012可以对从ram2014读取的数据执行本说明书中记载的、包含由程序的指令序列指定的各种操作、信息处理、条件判断、条件分支、无条件分支、信息的检索/置换等的各种处理,并将结果写回至ram2014。另外,cpu2012可以检索记录介质内的文件、数据库等中的信息。例如,在分别具有与第2属性的属性值建立了关联的第1属性的属性值的多个项目被保存在记录介质内的情况下,cpu2012可以从该多个项目中检索指定了第1属性的属性值的与条件一致的项目,读取该项目内保存的第2属性的属性值,由此获取与满足预先设定的条件的第1属性建立了关联的第2属性的属性值。
92.以上说明的程序或软件模块可以保存至计算机2000上或计算机2000附近的计算机可读介质中。向与专用通信网络或互联网连接的服务器系统内提供的硬盘或ram那样的记录介质可以作为计算机可读介质来使用。可以将计算机可读介质中保存的程序经由网络提供给计算机2000。
93.安装在计算机2000中并使计算机2000作为控制部200发挥功能的程序可以在cpu2012等中动作,从而使计算机2000作为控制部200的各单元分别发挥功能。这些程序中记述的信息处理被读入计算机2000,由此作为软件和上述的各种硬件资源相协作的具体单元、亦即控制部200的各单元发挥功能。并且,通过利用这些具体单元实现与本实施方式中的计算机2000的使用目的对应的信息的运算或加工,构建与使用目的对应的特有的控制部200。
94.参照框图等对各种实施方式进行了说明。在框图中,各功能块可以表示(1)执行操作的工序的步骤或(2)具有执行操作的功能的装置的各单元。特定的步骤以及各单元可以由专用电路、与计算机可读介质上保存的计算机可读指令一起被供给的可编程电路、以及/或与计算机可读介质上保存的计算机可读指令一起被供给的处理器实现。专用电路可以包
含数字以及/或模拟硬件电路,也可以包含集成电路(ic)以及/或离散电路。可编程电路可以包含逻辑and、逻辑or、逻辑xor、逻辑nand、逻辑nor、以及其他的逻辑操作、触发器、寄存器、现场可编程门阵列(fpga)、可编程逻辑阵列(pla)等那样的包含存储器元件等的可重建的硬件电路。
95.计算机可读介质可以包含能够保存由适当的设备执行的指令的任意的有形设备,其结果,具有在此保存的指令的计算机可读介质构成包含为了实现用于执行处理流程或框图中指定的操作的单元而能够执行的指令的产品的至少一部分。作为计算机可读介质的例子,可以包含电介质、磁介质、光介质、电磁介质、半导体介质等。作为计算机可读介质的更具体的例子,可以包含软盘(注册商标)、软磁碟、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom或闪存)、电可擦除可编程只读存储器(eeprom)、静态随机存取存储器(sram)、光盘只读存储器(cd-rom)、数字多用途盘(dvd)、蓝光(rtm)光碟、存储棒、集成电路卡等。
96.计算机可读指令可以包含汇编指令、指令集架构(isa)指令、机器指令、机器委托指令、微码、固件指令、状态设定数据、或由包括smalltalk、java(注册商标)、c 等那样的面向对象编程语言以及“c”编程语言或同样的编程语言那样的以往的过程型编程语言在内的1个或多个编程语言的任意的组合所记述的源代码或对象代码的任意一种。
97.计算机可读指令经由本地或局域网(lan)、互联网等那样的广域网(wan)被提供至通用计算机、特殊目的的计算机、或其他的能够编程的数据处理装置的处理器或可编程电路,为了实现用于执行被说明的处理流程或框图中指定的操作的单元,可以执行计算机可读指令。作为处理器的例子,包含计算机处理器、处理单元、微处理器、数字信号处理器、控制器、微控制器等。
98.以上,利用实施方式对本发明进行了说明,但本发明的技术范围不限于上述实施方式所记载的范围。能够对上述实施方式进行多种变更或改良对于本领域技术人员而言是显而易见的。进行了这样的变更或改良的方式也能够包含于本发明的技术范围内从权利要求书的记载而言是显而易见的。
99.对于权利要求书、说明书以及附图中示出的装置、系统、程序以及方法中的动作、流程、步骤以及步骤等的各处理的执行顺序而言,应注意没有特别明示“之前”、“先行”等,另外,只要不是将之前的处理的输出在之后的处理中使用,就可以以任意的顺序实现。对于权利要求书、说明书以及附图中的动作流程而言,即使为了便利而使用了“首先”、“接着”等进行了说明,但并不意味着必须以这样的顺序来实施。
100.[附图标记说明]
[0101]
10 警报系统
[0102]
20、60、90 车辆
[0103]
24 控制装置
[0104]
25 gnss 接收部
[0105]
26 车速传感器
[0106]
29 传感器
[0107]
40 信息输出装置
[0108]
48 通信装置
[0109]
50 基站
[0110]
52 服务器
[0111]
64 控制装置
[0112]
69 传感器
[0113]
70 道路
[0114]
80 行人
[0115]
82 终端
[0116]
110 区域
[0117]
111、112、113、114 地点
[0118]
200 控制部
[0119]
208 控制部
[0120]
230 判断部
[0121]
250 发送控制部
[0122]
260 接收控制部
[0123]
280 存储部
[0124]
2000 计算机
[0125]
2010 主控制器
[0126]
2012 cpu
[0127]
2014 ram
[0128]
2020 输入/输出控制器
[0129]
2022 通信接口
[0130]
2024 闪存
[0131]
2026 rom
[0132]
2040 输入/输出芯片。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。