技术特征:
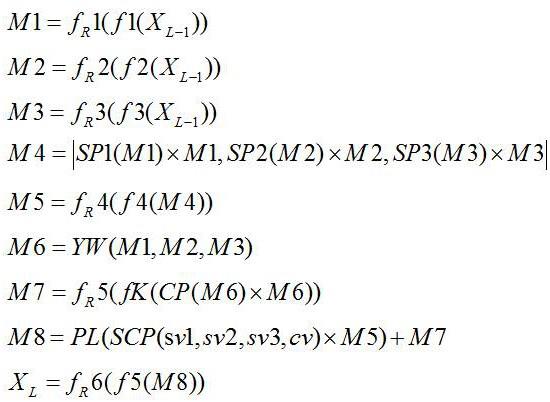
1.一种物流货车车牌识别方法,其特征是:包括以下步骤:s100、获取无人地磅系统中采集的货运车辆车牌图像,获取预先经过训练的图像识别卷积网络;所述图像识别卷积网络中设有主体池化层、前馈层、主体分类器和多个特征提取模块,所述特征提取模块用于提取所述货运车辆车牌图像的特征信息;s200、将所述货运车辆车牌图像输入所述图像识别卷积网络,所述货运车辆车牌图像顺次经过各个所述特征提取模块后,生成得到初步特征图;s300、利用所述主体池化层对所述初步特征图的各个图层进行全局池化操作,生成得到初步特征向量;s400、所述初步特征向量顺次经过所述前馈层和所述主体分类器后,生成得到所述货运车辆车牌图像的识别结果;其中,所述特征提取模块提取图像特征信息的过程表示为如下数学模型:其中,x
l-1
表示输入所述特征提取模块的特征图,x
l
表示所述特征提取模块经过特征提取操作后输出的特征图,f1、f2、f3、f4和f5均表示普通卷积操作,f1、f2和f3的卷积核大小各不相同,f
r
1、f
r
2、f
r
3、f
r
4、f
r
5和f
r
6均表示relu激活函数,∣
•
∣表示对其中的特征图做拼接操作,sp1表示第一调制模块,sp2表示第二调制模块,sp3表示第三调制模块,
×
表示元素对应乘积运算,yw表示旁路融合模块,cp表示旁路调制模块,fk表示跨步卷积操作,scp表示跨维度调制模块,sv1表示从所述第一调制模块输出的第一调制信息,sv2表示从所述第二调制模块输出的第二调制信息,sv3表示从所述第三调制模块输出的第三调制信息,cv表示从所述旁路调制模块输出的旁路调制信息,pl表示内部池化操作,m1、m2、m3、m5和m7分别表示函数f
r
1、f
r
2、f
r
3、f
r
4和f
r
5激活后生成的特征图,m4表示将特征图m1、特征图m2和特征图m3调制后拼接起来生成的特征图,m6表示所述旁路融合模块输出的特征图,m8表示内部池化操作后生成的特征图与m7特征图相加后生成的特征图。2.根据权利要求1所述的物流货车车牌识别方法,其特征是:f1表示步长为1、且卷积核尺寸为1*1的卷积操作,f2、f4和f5均表示步长为1、且卷积核尺寸为3*3的卷积操作,f3表示步长为1、且卷积核尺寸为5*5的卷积操作。
3.根据权利要求1所述的物流货车车牌识别方法,其特征是:所述跨步卷积操作的步长为2、卷积核尺寸为3*3。4.根据权利要求1所述的物流货车车牌识别方法,其特征是:所述第一调制模块、所述第二调制模块和所述第三调制模块内部操作过程相同,所述第一调制模块、所述第二调制模块和所述第三调制模块内部均设有顺次连接的调制全局池化层和调制激活函数,所述调制全局池化层用于对特征图在通道方向做全局最大池化操作,所述调制激活函数为sigmoid函数;所述第一调制信息、所述第二调制信息和所述第三调制信息分别为所述第一调制模块、所述第二调制模块和所述第三调制模块内部的调制全局池化层操作后输出的矩阵。5.根据权利要求4所述的物流货车车牌识别方法,其特征是:所述旁路融合模块内部运算过程表示为如下数学模型:其中,特征图m1、m2和m3作为所述旁路融合模块的输入,特征图m6作为旁路融合模块的输出,
×
表示元素对应乘积运算,∣
•
∣表示对其中的特征图做拼接操作,fp表示步长为1、且卷积核尺寸为1*1的普通卷积操作,f
r
p表示relu激活函数,y1表示将特征图m1、m2和m3相加后生成的特征图,y2表示将特征图m1、m2和m3做元素对应乘积后生成的特征图。6.根据权利要求5所述的物流货车车牌识别方法,其特征是:所述旁路调制模块内部设有顺次连接的旁路全局池化层、第一全连接层、第一旁路激活函数、第二全连接层和第二旁路激活函数;所述旁路全局池化层用于对特征图在空间方向做全局最大池化操作,所述第一旁路激活函数为relu函数,所述第二旁路激活函数为sigmoid函数;所述旁路调制信息为所述旁路调制模块内部的所述旁路全局池化层操作后输出的向量。7.根据权利要求6所述的物流货车车牌识别方法,其特征是:所述跨维度调制模块内部运算过程的数学模型为;其中,sv1表示所述第一调制信息,sv2表示所述第二调制信息,sv3表示所述第三调制信息,cv表示所述旁路调制信息,sv1、sv2、sv3和cv共同作为所述跨维度调制模块的输入,
×
表示元素对应乘积运算,∣
•
∣表示对其中的特征图做拼接操作,gfc表示第三全连接层,gpl表示跨维度全局池化层,所述跨维度全局池化层用于对特征图在通道方向做全局最大池化操作,δ
g1
和δ
g2
均表示sigmoid激活函数,sc1表示将sv1、sv2和sv3拼接起来生成的特征
图,sc2表示函数δ
g1
激活后生成的特征图,sc3表示所述跨维度调制模块输出的跨维度调制图。8.根据权利要求1所述的物流货车车牌识别方法,其特征是:所述内部池化操作的池化窗口尺寸为2*2、且步长为2。9.根据权利要求1所述的物流货车车牌识别方法,其特征是:所述主体池化层用于在空间方向对特征图的各个图层做全局平均池化操作;所述前馈层为全连接层,所述主体分类器为softmax分类器。10.一种物流货车车牌识别设备,包括处理器和存储器,所述存储器储存有计算机程序,其特征是:所述处理器通过加载所述计算机程序,用于执行如权利要求1至9任一项所述的物流货车车牌识别方法。
技术总结
本发明公开了一种物流货车车牌识别方法及设备,属于图像识别技术领域。识别方法包括获取无人地磅系统中采集的货运车辆车牌图像,获取预先经过训练的图像识别卷积网络,将货运车辆车牌图像输入图像识别卷积网络,货运车辆车牌图像顺次经过各个特征提取模块,利用主体池化层对初步特征图的各个图层进行全局池化操作,初步特征向量顺次经过前馈层和主体分类器,生成得到货运车辆车牌图像的识别结果等步骤。本发明的特征提取模块中采用并行的多卷积结构,在每个分支上均设有调制模块,能够更有针对性地、更有效地抑制不同类型的噪音,模型对有效信息利用率高,抗干扰能力强。抗干扰能力强。抗干扰能力强。
技术研发人员:孙晓宇 黄博 江培荣 麻亮 李攀 何永霞 吴农中 甄克 王帅 杨营 贺定雄
受保护的技术使用者:成都运荔枝科技有限公司
技术研发日:2022.11.26
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。