技术特征:
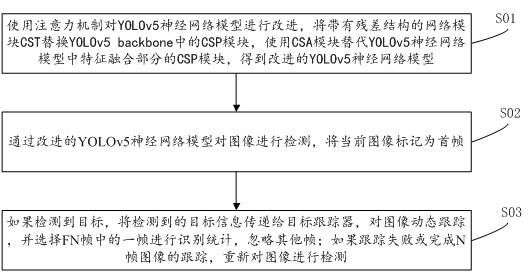
1.一种基于深度学习的电梯人流视觉统计方法,其特征在于,包括以下步骤:s01:使用注意力机制对yolov5神经网络模型进行改进,将带有残差结构的网络模块cst替换yolov5 backbone中的csp模块,使用csa模块替代yolov5神经网络模型中特征融合部分的csp模块,得到改进的yolo-el神经网络模型;s02:通过改进的yolo-el神经网络模型对图像进行检测,将当前图像标记为首帧;s03:如果检测到目标,将检测到的目标信息传递给目标跟踪器,对图像动态跟踪,并选择fn帧中的一帧进行识别统计,忽略其他帧;如果跟踪失败或完成n帧图像的跟踪,重新对图像进行检测。2.根据权利要求1所述的基于深度学习的电梯人流视觉统计方法,其特征在于,所述步骤s01中cst模块包括第一卷积层、第二卷积层、第三卷积层和transformer层,第一卷积层和第二卷积层用于接收上层网络的输出,第一卷积层的输出用作transformer层的输入,第二卷积层作为残差结构,其输出端与transformer层的输出进行拼接,得到的结构输入第三个卷积层中进行处理;所述transformer层中数据首先进入扁平化层,经过处理后由多维转换为1维,然后经归一化层进行归一化处理,随后经过多头注意力层的处理后再次进行归一化运算,最后通过多层感知机进行处理。3.根据权利要求1所述的基于深度学习的电梯人流视觉统计方法,其特征在于,所述步骤s01中csa模块包括第四卷积层、第五卷积层、第六卷积层、第七卷积层、注意力层和bottleneck层,其中bottleneck层为1
×
1的卷积运算,用于减少网络参数数量;所述第四卷积层、第五卷积层用于接收上层网络的输出,所述第四卷积层的输出用作注意力层的输入,注意力层的输出经过第六卷积层的处理后,其结果输入bottleneck层,经bottleneck层处理后与该第六卷积层的输出进行拼接,拼接结果与第五卷积层的结果继续拼接,所述第五卷积层构成残差结构,得到的结果通过第七卷积层进行处理得到最后的结果。4.根据权利要求1所述的基于深度学习的电梯人流视觉统计方法,其特征在于,所述步骤s03中跟踪器的建立包括:构建kcf跟踪器,通过使用轮转矩阵生成样本,训练一个判别式分类器,引入循环矩阵,采用快速傅里叶变换对kcf算法进行加速计算;训练kcf跟踪器,找到一个非线性映射函数使映射后的结果在线性空间下是可分的,即找到一个回归函数,给定样本和对应的标签,为目标模板,目标是优化最大平方和误差;使用高斯核函数对跟踪器进行训练。5.根据权利要求4所述的基于深度学习的电梯人流视觉统计方法,其特征在于,所述训练kcf跟踪器的方法包括以下步骤:由训练样本的非线性变换的线性组合构成:(16)
其中,为权重参数,为样本,此时实际为所有样本的加权平均,新样本的预测值为:(17)记称为核函数,得:(18)其中,、、为样本数量,为权重参数构成的向量,中的第t个元素为训练样本和测试样本的核函数值;使用线性函数的优化方法求解:(19)其中,是所有训练样本的核相关矩阵,,为单位矩阵,为正则项系数,为对应的目标值,为的集合;使用高斯核函数对跟踪器进行训练:记循环矩阵的初始向量为,经傅里叶变换后值为,根据式(19)可得:(20)经傅里叶变换得:(21)化简后得:
(22)对同样利用循环矩阵加速,对于高斯核函数,核相关矩阵的初始向量为:(23)其中,为径向基函数,、为样本向量,上式向量化后得:(24)其中,为高斯核函数,为样本向量的傅里叶变换,为样本向量的傅里叶变换的复共轭;将式(23)代入(24)后得:(25)则高斯核函数对应的初始向量为:(26)其中,是初始样本经傅里叶变换后得到的值,是常离散傅里叶矩阵,为经傅里叶变换后的复共轭;kcf算法的检测结果是一个标量,表示某一个样本的回归值:(27)对待检测的图像进行循环化:
(28)其中,表示训练样本与候选样本之间的核相关矩阵,为其初始向量,则:(29)傅里叶变换后:(30)化简后得:(31)此时检测结果是一个向量,维度和训练时的一样,其中最大元素对应的偏移量即为检测到的目标的位置。6.根据权利要求1所述的基于深度学习的电梯人流视觉统计方法,其特征在于,所述步骤s03之后还包括:当跟踪器跟踪失败,判断目标出现重叠,检测近景目标的深度信息,判断被遮挡目标是否还在电梯内;如果近景目标的深度大于电梯自身的深度,不进行统计,如果近景目标的深度小于电梯自身的深度,对其进行统计。7.根据权利要求6所述的基于深度学习的电梯人流视觉统计方法,其特征在于,所述检测近景目标的深度信息的方法包括:计算相机镜头光心到目标的距离:其中,为相机焦距;是乘员头部物理尺度,是电梯轿厢的内部固定物理尺度,为融合后的实际目标物理尺度,为异域像素特征,与表示不同类型特征的数量,和通过成像数据得出;以相机镜头的光心为坐标系原点建立右手三维坐标系,竖直向下为x轴,垂直于电梯后
立面向外为z轴,相机光轴与三个坐标轴x、y、z的夹角分别为,,,则目标的深度d:。8.一种根据权利要求1-7任一所述统计方法的基于深度学习的电梯人流视觉统计系统,其特征在于,包括:yolo-el神经网络模型构建模块,使用注意力机制对yolov5神经网络模型进行改进,将带有残差结构的网络模块cst替换yolov5 backbone中的csp模块,使用csa模块替代yolov5神经网络模型中特征融合部分的csp模块,得到改进的yolo-el神经网络模型;目标检测模块,通过改进的yolo-el神经网络模型对图像进行检测,将当前图像标记为首帧;跟踪统计模块,如果检测到目标,将检测到的目标信息传递给目标跟踪器,对图像动态跟踪,并选择fn帧中的一帧进行识别统计,忽略其他帧;如果跟踪失败或完成n帧图像的跟踪,重新对图像进行检测。9.根据权利要求8所述的基于深度学习的电梯人流视觉统计系统,其特征在于,还包括遮挡目标检测模块:当跟踪器跟踪失败,判断目标出现重叠,检测近景目标的深度信息,判断被遮挡目标是否还在电梯内;如果近景目标的深度大于电梯自身的深度,不进行统计,如果近景目标的深度小于电梯自身的深度,对其进行统计。10.一种计算机存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被执行时实现权利要求1-7任一项所述的基于深度学习的电梯人流视觉统计方法。
技术总结
本发明公开了基于深度学习的电梯人流视觉统计方法、系统及存储介质,包括:使用注意力机制对YOLOv5神经网络模型进行改进,将带有残差结构的网络模块CST替换YOLOv5 backbone中的CSP模块,使用CSA模块替代YOLOv5神经网络模型中特征融合部分的CSP模块;通过改进的YOLOv5神经网络模型对图像进行检测,将当前图像标记为首帧;如果检测到目标,将检测到的目标信息传递给目标跟踪器,对图像动态跟踪,并选择帧中的一帧进行识别统计;如果跟踪失败或完成图像跟踪,则重新检测,同时测量目标深度改善对遮挡目标的检测。本发明保证了电梯内成员数量统计的准确性,特别是增强了对小目标的检测能力。检测能力。检测能力。
技术研发人员:张贵阳 徐本连 吉思雨 刘琪 陆婷 张福生 任勇 翟树峰 朱玲羽 王绵绵
受保护的技术使用者:常熟理工学院
技术研发日:2022.11.25
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。