1.本发明涉及图像配准领域,特别是涉及一种基于三维牙齿和牙冠配准的牙齿重建方法、系统及终端。
背景技术:
2.近年来,随着人们逐渐开始重视牙齿的整齐美观,准确地提取三维数字牙齿模型在口腔正畸临床上有着重要的应用,尤其是在牙齿排列和牙齿生物力学模拟方面。完整的牙齿(包括牙冠和牙根)可以从3d数据重建,例如磁共振成像 (mri)、计算机断层扫描 (ct) 和锥形束计算机断层扫描 (cbct)。当前cbct 是牙科成像中最流行的成像技术,因为它可以更好地分离软组织和硬组织。虽然 cbct 成像能够重建出 3d 牙齿模型,但是由于cbct的精度一般在 200
‑‑
450微米之间,牙冠表面的细节信息丢失严重,而制作隐形矫治器需要更高精度的牙冠细节信息。
技术实现要素:
3.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种基于三维牙齿和牙冠配准的牙齿重建方法、系统及终端,用于解决现有技术中以上技术问题。
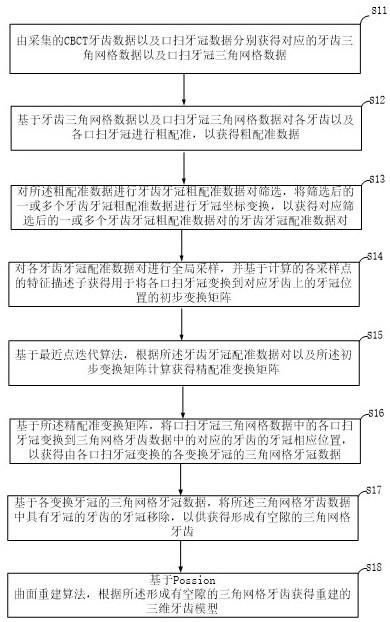
4.为实现上述目的及其他相关目的,本发明提供一种基于三维牙齿和牙冠配准的牙齿重建方法,所述方法包括:由采集的cbct牙齿数据以及口扫牙冠数据分别获得对应的牙齿三角网格数据以及口扫牙冠三角网格数据;其中,所述牙齿三角网格数据包括:每个牙齿的牙齿三角网格数据;所述口扫牙冠三角网格数据包括:每个口扫牙冠的牙冠三角网格数据;基于牙齿三角网格数据以及口扫牙冠三角网格数据对各牙齿以及各口扫牙冠进行粗配准,以获得粗配准数据;其中,所述粗配准数据包括:一或多个牙齿牙冠粗配准数据对;其中,每个牙齿牙冠粗配准数据对包括:一牙齿的牙齿三角网格数据;或包括:一配准牙齿的牙齿三角网格数据和对应该配准牙齿的配准口扫牙冠的牙冠三角网格数据;对所述粗配准数据进行牙齿牙冠粗配准数据对筛选,将筛选后的一或多个牙齿牙冠粗配准数据进行牙冠坐标变换,以获得对应筛选后的一或多个牙齿牙冠粗配准数据对的牙齿牙冠配准数据对;对各牙齿牙冠配准数据对进行全局采样,并基于计算的各采样点的特征描述子获得用于将各口扫牙冠变换到对应牙齿上的牙冠位置的初步变换矩阵;基于最近点迭代算法,根据所述牙齿牙冠配准数据对以及所述初步变换矩阵计算获得精配准变换矩阵;基于所述精配准变换矩阵,将口扫牙冠三角网格数据中的各口扫牙冠变换到牙齿三角网格数据中的对应的牙齿的牙冠相应位置,以获得由各口扫牙冠变换的各变换牙冠的牙冠三角网格数据;基于各变换牙冠的牙冠三角网格数据,将所述牙齿三角网格数据中具有牙冠的牙齿的牙冠移除,以供获得形成有空隙的三角网格牙齿;其中,形成有空隙的三角网格牙齿包括:多个移除牙冠后的三角网格牙根以及对应的三角网格变换牙冠;基于possion 曲面重建算法,根据所述形成有空隙的三角网格牙齿获得重建的三维牙齿模型。
5.于本发明的一实施例中,所述由采集的cbct牙齿数据以及口扫牙冠数据分别获得
对应的牙齿三角网格数据以及口扫牙冠三角网格数据包括:对所述cbct牙齿数据以及口扫牙冠数据进行刚体变换,获得具有三轴轴向数据的cbct牙齿变换数据以及口扫牙冠变换数据;对所述cbct牙齿变换数据中各牙齿的位置进行标记并进行图像数据三角化,获得每个牙齿的牙齿三角网格数据;其中,所述牙齿的类型包括:上颌牙齿以及下颌牙齿;获取所述口扫牙冠变换数据中各口扫牙冠的位置信息,并基于该位置信息剪切获得每个口扫牙冠的牙冠三角网格数据;其中,所述口扫牙冠的类型包括:上颌口扫牙冠以及下颌口扫牙冠。
6.于本发明的一实施例中,所述基于牙齿三角网格数据以及口扫牙冠三角网格数据对各牙齿以及各口扫牙冠进行粗配准,以获得粗配准数据包括:在各口扫牙冠上分别随机对多个点进行采样,以获得多个口扫牙冠采样点所对应的位置信息;分别对所述牙齿三角网格数据中各口扫牙冠所对应的牙齿的可采样位置范围内随机进行采样,以获得与对应的口扫牙冠的口扫牙冠采样点数量相同的牙齿采样点所对应的位置信息;其中,每个牙齿的可采样位置范围与对应的口扫牙冠的在三轴中z轴上的高度值相关;根据对应各口扫牙冠采样点的采样质心的位置信息以及对应各牙齿采样点的采样质心的位置信息计算获得供各口扫牙冠移动的平移向量;根据由各口扫牙冠采样点的位置信息形成的矩阵以及由各牙齿采样点的位置信息构成的矩阵获得供各口扫牙冠旋转的旋转矩阵;基于所述平移向量以及旋转矩阵,根据各口扫牙冠采样点的位置信息获得各配准牙冠的牙冠三角网格数据,以供与各牙齿的牙齿三角网格数据构成一或多个牙齿牙冠粗配准数据对。
7.于本发明的一实施例中,所述对所述粗配准数据进行牙齿牙冠粗配准数据对筛选,将筛选后的一或多个牙齿牙冠粗配准数据进行牙冠坐标变换,以获得对应筛选后的各牙齿牙冠粗配准数据对的牙齿牙冠配准数据对包括:获取同时具有配准牙齿的牙齿三角网格数据以及对应该配准牙齿的配准口扫牙冠的牙冠三角网格数据的牙齿牙冠粗配准数据对;基于获取的牙齿牙冠粗配准数据对中各配准牙齿所对应的配准口扫牙冠的在三轴中z轴上的高度值,对各配准牙齿的牙冠进行裁剪,并对裁剪的牙冠进行表面积进行计算;基于设定的表面积差值阈值,根据各牙齿牙冠粗配准数据对所对应的配准牙齿的裁剪牙冠的表面积对各牙齿牙冠粗配准数据对进行筛选;将筛选后的各牙齿牙冠粗配准数据对中的配准口扫牙冠的牙冠三角网格数据变换到对应配准牙齿的牙冠相应位置,形成对应的牙齿牙冠配准数据对;其中,所述牙齿牙冠配准数据对包括:一配准牙齿的牙齿三角网格数据和对应该配准牙齿的配准口扫牙冠的牙冠转换三角网格数据。
8.于本发明的一实施例中,所述对各牙齿牙冠配准数据对进行全局采样,并基于计算的各采样点的特征描述子获得用于将各口扫牙冠变换到对应牙齿上的牙冠位置的初步变换矩阵包括:分别对各牙齿牙冠配准数据对中的配准牙齿的牙齿三角网格数据和该配准牙齿的配准口扫牙冠的牙冠转换三角网格数据分别按照其各自的网格顶点数进行降采样,计算配准牙齿的牙齿三角网格数据以及配准口扫牙冠的牙冠转换三角网格数据的各网格顶点的特征描述子,以获得各牙齿牙冠配准数据所对应的特征描述子数据;基于快速全局配准算法,根据各牙齿牙冠配准数据所对应的特征描述子数据获得用于将各口扫牙冠变换到对应牙齿上的牙冠位置的初步变换矩阵。
9.于本发明的一实施例中,所述基于最近点迭代算法,根据所述牙齿牙冠配准数据对以及所述初步变换矩阵计算获得精配准变换矩阵包括:基于将所述初步变换矩阵作为初始化矩阵的最近点迭代算法,根据所述牙齿牙冠配准数据对以及所述初步变换矩阵计算获
得精配准变换矩阵。
10.于本发明的一实施例中,所述基于各变换牙冠的牙冠三角网格数据,将所述牙齿三角网格数据中具有牙冠的牙齿的牙冠移除,以供获得形成有空隙的三角网格牙齿包括:计算所述牙齿三角网格数据中具有牙冠的一或多个牙齿的牙齿三角网格数据中距离对应的变换牙冠的变换牙冠三角网格数据中的网格顶点集合预设距离阈值以内的网格顶点集合;将所有牙齿的网格顶点集合从所述牙齿三角网格数据移除,获得移除牙冠的各牙根的三角网格数据;基于变换牙冠的变换牙冠三角网格数据以及移除牙冠的各牙根的三角网格数据,形成一或多个有空隙的三角网格牙齿。
11.于本发明的一实施例中,所述基于possion 曲面重建算法,根据所述形成有空隙的三角网格牙齿获得重建的三维牙齿模型包括:计算由所述牙齿三角网格数据的各牙根表面上的网格顶点的法向量构成的牙根法向量数据以及由各口扫牙冠三角网格数据的口扫牙冠表面上的网格顶点的法向量构成的牙冠法向量数据;根据所述牙根法向量数据以及牙冠法向量数据构建能量最小化函数;基于possion 曲面重建算法,根据所述能量最小化函数以及各有空隙的三角网格牙齿进行模型重建,以获得三维牙齿模型。
12.为实现上述目的及其他相关目的,本发明提供一种基于三维牙齿和牙冠配准的牙齿重建系统,所述系统包括:三角网格数据获取模块,用于由采集的cbct牙齿数据以及口扫牙冠数据分别获得对应的牙齿三角网格数据以及口扫牙冠三角网格数据;其中,所述牙齿三角网格数据包括:每个牙齿的牙齿三角网格数据;所述口扫牙冠三角网格数据包括:每个口扫牙冠的牙冠三角网格数据;粗配准模块,连接所述三角网格数据获取模块,用于基于牙齿三角网格数据以及口扫牙冠三角网格数据对各牙齿以及各口扫牙冠进行粗配准,以获得粗配准数据;其中,所述粗配准数据包括:一或多个牙齿牙冠粗配准数据对;其中,每个牙齿牙冠粗配准数据对包括:一牙齿的牙齿三角网格数据;或包括:一配准牙齿的牙齿三角网格数据和对应该配准牙齿的配准口扫牙冠的牙冠三角网格数据;数据筛选模块,连接所述粗配准模块,用于对所述粗配准数据进行牙齿牙冠粗配准数据对筛选,将筛选后的一或多个牙齿牙冠粗配准数据进行牙冠坐标变换,以获得对应筛选后的一或多个牙齿牙冠粗配准数据对的牙齿牙冠配准数据对;细粒度配准模块,连接所述数据筛选模块,用于对各牙齿牙冠配准数据对进行全局采样,并基于计算的各采样点的特征描述子获得用于将各口扫牙冠变换到对应牙齿上的牙冠位置的初步变换矩阵;精准配准模块,连接所述数据筛选模块以及细粒度配准模块,用于基于最近点迭代算法,根据所述牙齿牙冠配准数据对以及所述初步变换矩阵计算获得精配准变换矩阵;口扫牙冠变换模块,连接所述精准配准模块,用于基于所述精配准变换矩阵,将口扫牙冠三角网格数据中的各口扫牙冠变换到牙齿三角网格数据中的对应的牙齿的牙冠相应位置,以获得由各口扫牙冠变换的各变换牙冠的牙冠三角网格数据;牙冠移除模块,连接所述口扫牙冠变换模块以及三角网格数据获取模块,用于基于各变换牙冠的牙冠三角网格数据,将所述牙齿三角网格数据中具有牙冠的牙齿的牙冠移除,以供获得形成有空隙的三角网格牙齿;其中,形成有空隙的三角网格牙齿包括:多个移除牙冠后的三角网格牙根以及对应的三角网格变换牙冠;模型重建模块,连接所述牙冠移除模块,用于基于possion 曲面重建算法,根据所述形成有空隙的三角网格牙齿获得重建的三维牙齿模型。
13.为实现上述目的及其他相关目的,本发明提供一种基于三维牙齿和牙冠配准的牙
齿重建终端,包括:一或多个存储器及一或多个处理器;所述一或多个存储器,用于存储计算机程序;所述一或多个处理器,连接所述存储器,用于运行所述计算机程序以执行所述基于三维牙齿和牙冠配准的牙齿重建方法。
14.如上所述,本发明是一种基于三维牙齿和牙冠配准的牙齿重建方法、系统及终端,具有以下有益效果:本发明通过cbct牙齿数据以及口扫牙冠数据的三阶段配准,将口扫的牙冠替换掉cbct重建牙齿的牙冠,并利用 3d 曲面重建算法重建出高精度的3d牙齿模型;本发明不仅可以生成高精度的牙齿,还既可以满足生产隐形矫治器的需求,也可以满足临床诊断需求(包括根骨治疗、牙齿排齐等)。
附图说明
15.图1显示为本发明一实施例中的基于三维牙齿和牙冠配准的牙齿重建方法的流程示意图。
16.图2显示为本发明一实施例中的基于三维牙齿和牙冠配准的牙齿重建方法的流程示意图。
17.图3显示为本发明一实施例中的基于三维牙齿和牙冠配准的牙齿重建系统的结构示意图。
18.图4显示为本发明一实施例中的基于三维牙齿和牙冠配准的牙齿重建终端的结构示意图。
具体实施方式
19.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
20.需要说明的是,在下述描述中,参考附图,附图描述了本发明的若干实施例。应当理解,还可使用其他实施例,并且可以在不背离本发明的精神和范围的情况下进行机械组成、结构、电气以及操作上的改变。下面的详细描述不应该被认为是限制性的,并且本发明的实施例的范围仅由公布的专利的权利要求书所限定。这里使用的术语仅是为了描述特定实施例,而并非旨在限制本发明。空间相关的术语,例如“上”、“下”、“左”、“右”、“下面”、“下方”、
““
下部”、“上方”、“上部”等,可在文中使用以便于说明图中所示的一个元件或特征与另一元件或特征的关系。
21.在通篇说明书中,当说某部分与另一部分“连接”时,这不仅包括“直接连接
”ꢀ
的情形,也包括在其中间把其它元件置于其间而“间接连接”的情形。另外,当说某种部分“包括”某种构成要素时,只要没有特别相反的记载,则并非将其它构成要素,排除在外,而是意味着可以还包括其它构成要素。
22.其中提到的第一、第二及第三等术语是为了说明多样的部分、成分、区域、层及/或段而使 用的,但并非限定于此。这些术语只用于把某部分、成分、区域、层或段区别于其它 部分、成分、区域、层或段。因此,以下叙述的第一部分、成分、区域、层或段在不 超出本发明
范围的范围内,可以言及到第二部分、成分、区域、层或段。
23.再者,如同在本文中所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文中有相反的指示。应当进一步理解,术语“包含”、“包括”表明存在所述的特征、操作、元件、组件、项目、种类、和/或组,但不排除一个或多个其他特征、操作、元件、组 件、项目、种类、和/或组的存在、出现或添加。此处使用的术语“或”和“和/或”被解释为包括性的,或意味着任一个或任何组合。因此,“a、b或c”或者“a、b和/或c”意味着“以下任一个: a;b;c;a和b;a和c;b和c;a、b和c”。仅当元件、功能或操作的组合在某些方式下内在地互相排斥时,才会出现该定义的例外。
24.本发明提供一种基于三维牙齿和牙冠配准的牙齿重建方法、系统及终端,通过cbct牙齿数据以及口扫牙冠数据的三阶段配准,将口扫的牙冠替换掉cbct重建牙齿的牙冠,并利用 3d 曲面重建算法重建出高精度的3d牙齿模型;本发明不仅可以生成高精度的牙齿,还既可以满足生产隐形矫治器的需求,也可以满足临床诊断需求(包括根骨治疗、牙齿排齐等)。
25.下面以附图为参考,针对本发明的实施例进行详细说明,以便本发明所述技术领域的技术人员能够容易地实施。本发明可以以多种不同形态体现,并不限于此处说明的实施例。
26.如图1展示本发明实施例中的一种基于三维牙齿和牙冠配准的牙齿重建方法的流程示意图。
27.所述方法包括:步骤s11:由采集患者的cbct牙齿数据以及口扫牙冠数据分别获得对应的牙齿三角网格数据以及口扫牙冠三角网格数据。
28.详细来说,所述牙齿三角网格数据包括:每个牙齿的牙齿三角网格数据;其中,每个牙齿的牙齿三角网格数据包括牙根的三角网格数据以及牙冠的三角网格数据;所述口扫牙冠三角网格数据包括:每个口扫牙冠的牙冠三角网格数据;需要说明的是,每个口扫牙冠都在所述牙齿三角网格数据对应有一个牙齿。
29.可选的,步骤s11包括:对所述cbct牙齿数据以及口扫牙冠数据进行刚体变换,获得具有三轴轴向数据的cbct牙齿变换数据以及口扫牙冠变换数据;具体的,获取由利用cbct扫描仪和口内扫描仪对用户的牙齿进行扫描获得的cbct牙齿数据以及口扫牙冠数据;对所述cbct牙齿数据进行刚体变换获得具有三轴(相互垂直的x、y以及z轴)轴向数据的cbct牙齿变换数据;对口扫牙冠数据进行变换也获得与所述cbct牙齿变换数据轴向一致的三角网格形式的口扫牙冠变换数据;对所述cbct牙齿变换数据中各牙齿的位置进行标记并进行图像数据三角化,获得每个牙齿的牙齿三角网格数据;其中,所述牙齿的类型包括:上颌牙齿以及下颌牙齿;具体的,利用cbct 分牙算法计算出所述cbct牙齿变换数据中每颗牙齿在dicom文件中的位置信息,并基于位置信息在所述cbct牙齿变换数据中标记出每颗牙齿;然后利用 marching cube 算法将标记牙齿位置的所述cbct牙齿变换数据进行图像三角化,从而得到每个牙齿的牙齿三角网格数据;
获取所述口扫牙冠变换数据中各口扫牙冠的位置信息,并基于该位置信息剪切获得每个口扫牙冠的牙冠三角网格数据;其中,所述口扫牙冠的类型包括:上颌口扫牙冠以及下颌口扫牙冠。具体的,利用口扫分牙算法计算出每个口扫牙冠在所述口扫牙冠变换数据中的位置,基于位置信息剪切出每个牙冠,从而得到每个口扫牙冠的牙冠三角网格数据。
30.可选的,利用 cbct 软件工具对所述cbct牙齿数据进行刚体变换(包括平移变换和旋转变换)使得z 轴垂直水平面从下到上(确保上颌牙在下颌牙的z 轴上方),x 轴垂直冠状面从前到后(相对于被观察者牙合图像),y 轴垂直矢状面从左到右(相对于被观察者牙合图像),三个轴向满足右手定律。类似地,利用网格处理工具对口扫牙冠变换数据进行刚体变换,使得x、y、z 三个轴向和对应的 cbct 图像轴向一致。
31.步骤s12:基于牙齿三角网格数据以及口扫牙冠三角网格数据对各牙齿以及各口扫牙冠进行粗配准,以获得粗配准数据。
32.详细来说,所述粗配准数据包括:一或多个牙齿牙冠粗配准数据对;其中,每个牙齿牙冠粗配准数据对包括:一牙齿的牙齿三角网格数据(说明不存在牙冠);或包括:一配准牙齿的牙齿三角网格数据和对应该配准牙齿的配准口扫牙冠的牙冠三角网格数据(说明既存在牙根也存在牙冠)。
33.可选的,步骤s12包括:在各口扫牙冠上分别随机对多个点(网格顶点)进行采样,以获得多个口扫牙冠采样点所对应的位置信息;具体的,获取各口扫牙冠的在三轴中z轴上的高度值h,在每个口扫牙冠上随机采样 n (n大于等于1)个点获得n个口扫牙冠采样点所对应的位置信息;(包括:xyz轴坐标信息);分别对所述牙齿三角网格数据中各口扫牙冠所对应的牙齿的可采样位置范围内随机进行采样,以获得与对应的口扫牙冠的口扫牙冠采样点数量相同的牙齿采样点所对应的位置信息;其中,每个牙齿的可采样位置范围与对应的口扫牙冠的在三轴中z轴上的高度值相关;具体的,根据各口扫牙冠所对应的牙位在所述牙齿三角网格数据中找到对应的牙齿,若该牙齿是上颌牙齿,则记对应的牙齿三角网格数据的网格顶点在 z 轴方向的最小值为 minz,从牙齿三角网格数据中z 坐标落在 minz 和 minz h 之间的点中随机采样 n 个点,并获得n个牙齿采样点所对应的位置信息(包括:xyz轴坐标信息);对所有的上颌牙进行完全相同的采样操作;若该牙齿是下颌牙齿,则记应的牙齿三角网格数据的网格顶点在 z 轴方向上最大值为 maxz,从牙齿三角网格数据中 z 坐标落在 maxz 和 maxz
ꢀ‑ꢀ
h 之间的点中随机采样 n 个点,并获得n个牙齿采样点所对应的位置信息(包括:xyz轴坐标信息);对所有的下颌牙进行完全相同的采样操作。
34.根据对应各口扫牙冠采样点的采样质心的位置信息以及对应各牙齿采样点的采样质心的位置信息计算获得供各口扫牙冠移动的平移向量;具体的,根据对应上颌牙冠的各口扫牙冠采样点以及对应上颌牙冠的各牙齿采样点分别计算上颌牙冠采样点质心 ma1 和上颌牙齿采样点质心 mb1,记平移向量为 t 1= mb 1
‑ꢀ
ma1,将上颌牙冠的各口扫牙冠采样点沿着 t 1移动;根据对应下颌牙冠的各口扫牙冠采样点以及对应下颌牙冠的各牙齿采样点分别计算下颌牙冠采样点质心 ma2 和下颌牙齿采样点质心 mb2,记平移向量为 t2= mb 2
‑ꢀ
ma2,将下颌牙冠的各口扫牙冠采样点沿着 t 2移动;根据由各口扫牙冠采样点的位置信息形成的矩阵以及由各牙齿采样点的位置信
息构成的矩阵获得供各口扫牙冠旋转的旋转矩阵;具体的,记上颌牙冠的各口扫牙冠采样点形成的矩阵为,对应的上颌牙齿采样点形成的矩阵记为
ꢀꢀ
,建立最小二乘问题:
ꢀꢀꢀꢀꢀꢀꢀ
(1)其中 是旋转矩阵, 表示 frobenius 范数 ;其中,;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)利用奇异值分解(singular value decomposition, svd)求解该问题得到上颌牙冠对应的旋转矩阵。同样的,可以得到下颌牙冠对应的旋转矩阵。
35.基于所述平移向量以及旋转矩阵,根据各口扫牙冠采样点的位置信息获得各配准牙冠的牙冠三角网格数据,以供与各牙齿的牙齿三角网格数据构成一或多个牙齿牙冠粗配准数据对。具体的,将上颌牙冠沿着上颌牙冠对应的平移向量方向移动,然后利用对应上颌牙冠的旋转矩阵对其进行旋转,得到各上颌配准牙冠的牙冠三角网格数据,并结合分别与其对应的上颌牙齿的牙齿三角网格数据,构成一或多个上颌牙齿牙冠粗配准数据对;将下颌牙冠沿着下颌牙冠对应的平移向量方向移动,然后利用对应上颌牙冠的旋转矩阵对其进行旋转,得到各上颌配准牙冠的牙冠三角网格数据,并结合分别与其对应的下颌牙齿的牙齿三角网格数据,构成一或多个下颌牙齿牙冠粗配准数据对。
36.步骤s13:对所述粗配准数据进行牙齿牙冠粗配准数据对筛选,将筛选后的一或多个牙齿牙冠粗配准数据进行牙冠坐标变换,以获得对应筛选后的一或多个牙齿牙冠粗配准数据对的牙齿牙冠配准数据对。
37.可选的,由于 cbct 扫描仪能够识别牙根而口扫只能识别牙冠,因此牙齿的数量可能和牙冠的数量不一致;同时由于 cbct 扫描仪的精度相比口扫的精度较低,导致三角网格牙齿的牙冠表面几何细节可能和三角网格牙冠的表面细节差异较大,会对后续的配准造成噪声,因此步骤s13包括:获取同时具有配准牙齿的牙齿三角网格数据以及对应该配准牙齿的配准口扫牙冠的牙冠三角网格数据的牙齿牙冠粗配准数据对;基于获取的牙齿牙冠粗配准数据对中各配准牙齿所对应的配准口扫牙冠的在三轴中z轴上的高度值,对各配准牙齿的牙冠进行裁剪,并对裁剪的牙冠以及各配准牙齿所对应的配准口扫牙冠进行表面积计算;基于设定的表面积差值阈值,根据各牙齿牙冠粗配准数据对所对应的配准牙齿的裁剪牙冠的表面积以及配准牙齿所对应的配准口扫牙冠的表面积对各牙齿牙冠粗配准数据对进行筛选;具体的,将各牙齿牙冠粗配准数据对所对应的配准牙齿的裁剪牙冠的表面积与配准牙齿所对应的配准口扫牙冠的表面积进行对比,如果表面积差异大于表面积差值阈值,则舍弃该牙齿牙冠粗配准数据对;否则,保留该牙齿牙冠粗配准数据对;将筛选后的各牙齿牙冠粗配准数据对中的配准口扫牙冠的牙冠三角网格数据变换到对应配准牙齿的牙冠相应位置,形成对应的牙齿牙冠配准数据对;其中,所述牙齿牙冠配准数据对包括:一配准牙齿的牙齿三角网格数据和对应该配准牙齿的配准口扫牙冠的牙
冠转换三角网格数据。具体的,将保留下来的每个牙齿牙冠粗配准数据对的配准口扫牙冠的牙冠三角网格数据变换到对应配准牙齿的牙冠相应位置,获得由配准口扫牙冠变换的牙冠转换三角网格数据以及对应该配准口扫牙冠的配准牙齿的牙齿三角网格数据。
38.步骤s14:对各牙齿牙冠配准数据对进行全局采样,并基于计算的各采样点的特征描述子获得用于将各口扫牙冠变换到对应牙齿上的牙冠位置的初步变换矩阵。
39.其中,计算各牙齿牙冠配准数据对中的配准牙齿的牙齿三角网格数据和该配准牙齿的配准口扫牙冠的牙冠转换三角网格数据表面形态的相似度,选择相似度高的牙齿对,在这些牙齿对上进行采样,计算表面点的特征描述子,基于这些特征描述子进行全局细粒度的配准。
40.可选的,步骤s14包括:分别对各牙齿牙冠配准数据对中的配准牙齿的牙齿三角网格数据和该配准牙齿的配准口扫牙冠的牙冠转换三角网格数据分别按照其各自的网格顶点数进行降采样,计算配准牙齿的牙齿三角网格数据以及配准口扫牙冠的牙冠转换三角网格数据的各网格顶点的特征描述子,以获得各牙齿牙冠配准数据所对应的特征描述子数据;具体的,对各牙齿牙冠配准数据对中的配准牙齿的牙齿三角网格数据和该配准牙齿的配准口扫牙冠的牙冠转换三角网格数据按照其各自的网格顶点数进行降采样,计算降采样后网格顶点的法向量以及每个网格顶点的特征特征描述子,包括但不限于:快速点特征直方图(fast point feature histogram, fpfh);基于快速全局配准算法,根据各牙齿牙冠配准数据所对应的特征描述子数据获得用于将各口扫牙冠变换到对应牙齿上的牙冠位置的初步变换矩阵;具体的,利用快速全局配准算法,然后将每个网格顶点的特征描述子作为输入配准这些降采样后的点获得用于将各口扫牙冠变换到对应牙齿上的牙冠位置的初步变换矩阵。
41.步骤s15:基于最近点迭代算法,根据所述牙齿牙冠配准数据对以及所述初步变换矩阵计算获得精配准变换矩阵。
42.可选的,步骤s15包括:基于将所述初步变换矩阵作为初始化矩阵的最近点迭代算法,根据所述牙齿牙冠配准数据对以及所述初步变换矩阵计算获得精配准变换矩阵。
43.步骤s16:基于所述精配准变换矩阵,将口扫牙冠三角网格数据中的各口扫牙冠变换到牙齿三角网格数据中的对应的牙齿的牙冠相应位置,以获得由各口扫牙冠变换的各变换牙冠的牙冠三角网格数据。
44.需要说明的是。对于每颗上下颌牙而言,如果上下颌牙冠不存在,那么直接利用原始上下颌三角网格牙齿作为最终的牙齿,不进入后续的算法处理流程。
45.步骤s17:基于各变换牙冠的牙冠三角网格数据,将所述牙齿三角网格数据中具有牙冠的牙齿的牙冠移除,以供获得形成有空隙的三角网格牙齿;其中,形成有空隙的三角网格牙齿包括:多个移除牙冠后的三角网格牙根以及对应的三角网格变换牙冠。
46.可选的,步骤s17包括:计算所述牙齿三角网格数据中具有牙冠的一或多个牙齿的牙齿三角网格数据中距离对应的变换牙冠的变换牙冠三角网格数据中的网格顶点集合预设距离阈值以内的网格顶点集合;具体的,如果上颌牙的牙冠存在,那么给定距离阈值d 微米,计算出距离在变换后的变换牙冠的变换牙冠三角网格数据中的网格顶点预设距离阈值(集合d 微米)以内的所有上颌牙齿的顶点集合;下颌牙齿的做法与上颌牙齿相同;
将所有牙齿的网格顶点集合从所述牙齿三角网格数据移除,获得移除牙冠的各牙根的三角网格数据;具体的,将这些顶点集合从上颌三角网格牙齿中移除,得到无牙冠的三角网格牙根;下颌牙齿的做法与上颌牙齿相同;基于变换牙冠的变换牙冠三角网格数据以及移除牙冠的各牙根的三角网格数据,形成一或多个有空隙的三角网格牙齿。
47.步骤s18:基于possion 曲面重建算法,根据所述形成有空隙的三角网格牙齿获得重建的三维牙齿模型。
48.可选的,步骤s18:由于后续的曲面重建算法需要利用三角网格每个点的法向量,计算由所述牙齿三角网格数据的各牙根表面上的网格顶点的法向量构成的牙根法向量数据以及由各口扫牙冠三角网格数据的口扫牙冠表面上的网格顶点的法向量构成的牙冠法向量数据;根据所述牙根法向量数据以及牙冠法向量数据构建能量最小化函数;(3)其中, 表示标量场函数, 表示标量场函数的梯度场, 表示牙根和牙冠的三角网格顶点的法向量, 表示牙根和牙冠的三角网格顶点位置坐标, 表示惩罚系数的权重因子,它用来控制标量场函数的梯度场拟合和标量场函数拟合之间的权重比。
49.基于possion 曲面重建算法,根据所述能量最小化函数以及各有空隙的三角网格牙齿进行模型重建,以获得三维牙齿模型;具体的,由于每个点的法向量已经计算完成,因此不需要利用点和邻近点来估算每个点的法向量,采用筛选的 possion 曲面重建方法中求解能量最小化函数的数值算法对上述问题进行求解,从而得到高精度3d牙齿模型。
50.为了更好的说明上述基于三维牙齿和牙冠配准的牙齿重建方法,本发明提供以下具体实施例。
51.实施例1:一种基于三维牙齿和牙冠配准的牙齿重建方法。如图2所示为基于三维牙齿和牙冠配准的牙齿重建的流程示意图;所述方法包括:步骤1:获取三角网格牙齿和牙冠数据:利用cbct扫描仪和口内扫描仪对用户的牙齿进行扫描,得到用户的cbct牙合dicom 图像数据和三角网格牙合数据。利用 cbct 软件工具对 cbct 牙合进行刚体变换(包括平移变换和旋转变换)使得z 轴垂直水平面从下到上(确保上颌牙在下颌牙的z 轴上方),x 轴垂直冠状面从前到后(相对于被观察者牙合图像),y 轴垂直矢状面从左到右(相对于被观察者牙合图像),三个轴向满足右手定律。类似地,利用网格处理工具对口扫牙合数据进行刚体变换,使得x、y、z 三个轴向和对应的 cbct 图像轴向一致。利用cbct 分牙算法计算出每颗牙齿在dicom文件中的位置信息,基于位置信息标记出每颗牙齿,然后利用 marching cube 算法将牙齿的图像数据三角化,从而得到三角网格的牙齿数据;同时,利用口扫分牙算法计算出每个牙冠在三角网格牙冠牙龈数据中的位置,基于位置信息剪切出每个牙冠,从而得到三角网格的牙冠数据。
52.步骤2、粗配准三角网格牙齿和牙冠:
上下颌牙齿分别与对应的上下颌牙冠分别进行粗配准,由于配准的算法相同,因此,此处仅以上颌牙对(cbct 牙齿和对应的口扫牙冠)为例描述配准算法和流程。首先对于单个口扫牙冠而言,记它 z 轴方向上的高度为 h,在口扫牙冠上随机采样 n 个点,根据牙位找到对应的 cbct 牙齿,记三角面片顶点在 z 轴方向最小值为 minz,从 cbct 牙齿表面点 z 坐标落在 minz 和 minz h 之间的点中随机采样 n 个点,(若 cbct 牙齿为下颌牙,记三角面片顶点在 z 轴方向上最大值为 maxz,从 cbct 牙齿表面点 z 坐标落在 maxz 和 maxz
ꢀ‑ꢀ
h 之间的点中随机采样 n 个点),对所有的上颌牙对进行完全相同的采样操作。分别计算上半口牙冠采样点质心 ma 和牙列采样点质心 mb,记平移向量为 t = mb
ꢀ‑ꢀ
ma,将上半口牙冠所有的采样点沿着 t 移动。记上半口牙冠采样点形成的矩阵为a,上半口牙列采样点形成的矩阵记为b,建立最小二乘问题:利用奇异值分解(singular value decomposition, svd)求解该问题得到旋转矩阵。将上半口牙冠沿着 t 移动,然后利用旋转矩阵对其进行旋转,得到最终的粗配准结果。
53.步骤3:筛选三角网格牙齿和对应的牙冠并裁减牙冠;由于上下颌牙齿与对应的上下颌牙冠的数据处理算法一致,因此,此处仅以上颌牙齿和上颌牙冠为例描述本步骤的具体算法。由于 cbct 扫描仪能够识别牙根而口扫只能识别牙冠,因此上颌牙齿的数量可能和上颌牙冠的数量不一致;同时由于 cbct 扫描仪的精度相比口扫的精度较低,导致三角网格牙齿的牙冠表面几何细节可能和三角网格牙冠的表面细节差异较大,会对后续的配准造成噪声,因此,本专利采取如下后处理算法:首先找到同时存在上颌牙齿和上颌牙冠的数据对,然后基于上颌牙冠的高度,裁剪出对应上颌牙齿的牙冠部分,分别计算它们的表面积,如果面积差异大于给定的阈值,则舍弃该数据对;否则,保留上颌牙齿的牙冠部分,同时将对应的上颌牙冠变换到上颌牙齿的坐标位置,形成数据对。
54.步骤4:全局采样并计算采样点的特征描述子进行细粒度匹配;基于上一步计算出来的多个上下颌牙齿的牙冠以及对应的上下颌牙冠数据对,进一步细粒度配准,由于上颌牙齿配准算法和下颌牙齿配准算法相同,此处仅以上颌牙齿的牙冠和对应的上颌牙冠的配准为例描述本步骤的配准算法。首先,对上颌牙齿的牙冠和对应的上颌牙冠的三角网格数据按照顶点数进行降采样,计算降采样后顶点的法向量以及每个顶点的特征描述子,包括但不限于:快速点特征直方图(fast point feature histogram, fpfh);然后将每个顶点的特征描述子作为输入,利用快速全局配准算法进一步配准这些降采样后的点,得到将上颌牙冠变换到对应上颌牙齿的牙冠位置的变换矩阵。
55.步骤5:利用最近点迭代算法进行精配准;基于上一步得到的配准结果,进一步精配准得到最终的结果。由于上下颌的精配准算法相同,因此,此处仅以上颌牙齿的牙冠和对应的上颌牙冠的配准为例描述本步骤的配准算法。首先,提取第3步计算出的多个上颌牙齿的牙冠以及对应的上颌牙冠数据对的点云数据;将第4步得到的变换矩阵做为最近点迭代算法(iterative closest point, icp)的初始化变换矩阵,计算得到精配准变换矩阵。
56.步骤6:移除三角网格牙齿的牙冠;由于上颌牙齿的处理和下颌牙齿的处理算法相同,此处仅描述上颌牙齿的处理算法。基于粗配准变换矩阵、细粒度变换矩阵以及精配准变换矩阵,将上半口三角网格牙冠变
换到对应的上半口三角网格牙列的坐标位置。由于后续的曲面重建算法需要利用三角网格每个顶点的法向量,因此, 根据法向量公式计算出所有三角网格牙齿的每个顶点的法向量和每个口扫牙冠三角网格顶点的法向量。对于每颗上颌牙而言,如果上颌牙冠不存在,那么直接利用原始上颌三角网格牙齿作为最终的牙齿,不进入后续的算法处理流程;如果上颌牙冠存在,那么给定距离阈值d 微米,计算出距离在变换后的上颌牙冠顶点集合d 微米以内的所有上颌牙齿的顶点集合,将这些顶点集合从上颌三角网格牙齿中移除,得到无牙冠的三角网格牙根,最后形成有空隙的三角网格牙齿;步骤7:利用筛选的possion 曲面重建方法重建牙齿;对于上一步处理得到的每颗有缝隙的牙齿进行进一步处理。取每个顶点的三维坐标和法向量构建能量最小化函数:由于每个点的法向量已经计算完成,因此不需要利用点和邻近点来估算每个点的法向量,采用筛选的 possion 曲面重建方法中求解能量最小化函数的数值算法对上述问题进行求解,从而得到高精度3d牙齿模型。
57.与上述实施例原理相似的是,本发明提供一种基于三维牙齿和牙冠配准的牙齿重建系统。
58.以下结合附图提供具体实施例:如图3展示本发明实施例中的一种基于三维牙齿和牙冠配准的牙齿重建系统的结构示意图。
59.所述系统包括:三角网格数据获取模块31,用于由采集的cbct牙齿数据以及口扫牙冠数据分别获得对应的牙齿三角网格数据以及口扫牙冠三角网格数据;其中,所述牙齿三角网格数据包括:每个牙齿的牙齿三角网格数据;所述口扫牙冠三角网格数据包括:每个口扫牙冠的牙冠三角网格数据;粗配准模块32,连接所述三角网格数据获取模块31,用于基于牙齿三角网格数据以及口扫牙冠三角网格数据对各牙齿以及各口扫牙冠进行粗配准,以获得粗配准数据;其中,所述粗配准数据包括:一或多个牙齿牙冠粗配准数据对;其中,每个牙齿牙冠粗配准数据对包括:一牙齿的牙齿三角网格数据;或包括:一配准牙齿的牙齿三角网格数据和对应该配准牙齿的配准口扫牙冠的牙冠三角网格数据;数据筛选模块33,连接所述粗配准模块32,用于对所述粗配准数据进行牙齿牙冠粗配准数据对筛选,将筛选后的一或多个牙齿牙冠粗配准数据进行牙冠坐标变换,以获得对应筛选后的一或多个牙齿牙冠粗配准数据对的牙齿牙冠配准数据对;细粒度配准模块34,连接所述数据筛选模块33,用于对各牙齿牙冠配准数据对进行全局采样,并基于计算的各采样点的特征描述子获得用于将各口扫牙冠变换到对应牙齿上的牙冠位置的初步变换矩阵;精准配准模块35,连接所述数据筛选模块33以及细粒度配准模块34,用于基于最近点迭代算法,根据所述牙齿牙冠配准数据对以及所述初步变换矩阵计算获得精配准变换矩阵;口扫牙冠变换模块36,连接所述精准配准模块35,用于基于所述精配准变换矩阵,将口扫牙冠三角网格数据中的各口扫牙冠变换到牙齿三角网格数据中的对应的牙齿的牙冠相应位置,以获得由各口扫牙冠变换的各变换牙冠的牙冠三角网格数据;
牙冠移除模块37,连接所述口扫牙冠变换模块36以及三角网格数据获取模块31,用于基于各变换牙冠的牙冠三角网格数据,将所述牙齿三角网格数据中具有牙冠的牙齿的牙冠移除,以供获得形成有空隙的三角网格牙齿;其中,形成有空隙的三角网格牙齿包括:多个移除牙冠后的三角网格牙根以及对应的三角网格变换牙冠;模型重建模块38,连接所述牙冠移除模块37,用于基于possion 曲面重建算法,根据所述形成有空隙的三角网格牙齿获得重建的三维牙齿模型。
60.需说明的是,应理解图3系统实施例中的各个模块的划分仅仅是一种逻辑功能的划分,实际实现时可以全部或部分集成到一个物理实体上,也可以物理上分开。且这些单元可以全部以软件通过处理元件调用的形式实现;也可以全部以硬件的形式实现;还可以部分单元通过处理元件调用软件的形式实现,部分单元通过硬件的形式实现。
61.由于该基于三维牙齿和牙冠配准的牙齿重建系统的实现原理已在前述实施例中进行了叙述,因此此处不作重复赘述。
62.如图4展示本发明实施例中的基于三维牙齿和牙冠配准的牙齿重建终端40的结构示意图。
63.所述基于三维牙齿和牙冠配准的牙齿重建终端40包括:存储器41及处理器42。所述存储器41用于存储计算机程序;所述处理器42运行计算机程序实现如图1所述的基于三维牙齿和牙冠配准的牙齿重建方法。
64.可选的,所述存储器41的数量均可以是一或多个,所述处理器42的数量均可以是一或多个,而图4中均以一个为例。
65.可选的,所述基于三维牙齿和牙冠配准的牙齿重建终端40中的处理器42会按照如图1所述的步骤,将一个或多个以应用程序的进程对应的指令加载到存储器41中,并由处理器42来运行存储在第一存储器41中的应用程序,从而实现如图1所述基于三维牙齿和牙冠配准的牙齿重建方法中的各种功能。
66.可选的,所述存储器41,可能包括但不限于高速随机存取存储器、非易失性存储器。例如一个或多个磁盘存储设备、闪存设备或其他非易失性固态存储设备;所述处理器42,可能包括但不限于中央处理器(central processing unit,简称cpu)、网络处理器(network processor,简称np)等;还可以是数字信号处理器(digital signal processing,简称dsp)、专用集成电路(application specific integrated circuit,简称asic)、现场可编程门阵列(field-programmable gate array,简称fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。
67.可选的,所述处理器42可以是通用处理器,包括中央处理器(central processing unit,简称cpu)、网络处理器(network processor,简称np)等;还可以是数字信号处理器(digital signal processing,简称dsp)、专用集成电路(application specific integrated circuit,简称asic)、现场可编程门阵列(field-programmable gate array,简称fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。
68.本发明还提供计算机可读存储介质,存储有计算机程序,所述计算机程序运行时实现如图1所示的基于三维牙齿和牙冠配准的牙齿重建方法。所述计算机可读存储介质可包括,但不限于,软盘、光盘、cd-rom(只读光盘存储器)、磁光盘、rom(只读存储器)、ram(随机存取存储器)、eprom(可擦除可编程只读存储器)、eeprom(电可擦除可编程只读存储器)、
磁卡或光卡、闪存、或适于存储机器可执行 指令的其他类型的介质/机器可读介质。所述计算机可读存储介质可以是未接入计算机设备的产品,也可以是已接入计算机设备使用的部件。
69.综上所述,本发明的基于三维牙齿和牙冠配准的牙齿重建系统,通过cbct牙齿数据以及口扫牙冠数据的三阶段配准,将口扫的牙冠替换掉cbct重建牙齿的牙冠,并利用 3d 曲面重建算法重建出高精度的3d牙齿模型;本发明不仅可以生成高精度的牙齿,还既可以满足生产隐形矫治器的需求,也可以满足临床诊断需求(包括根骨治疗、牙齿排齐等)。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
70.上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,但凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。