技术特征:
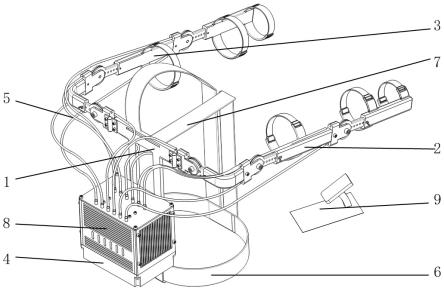
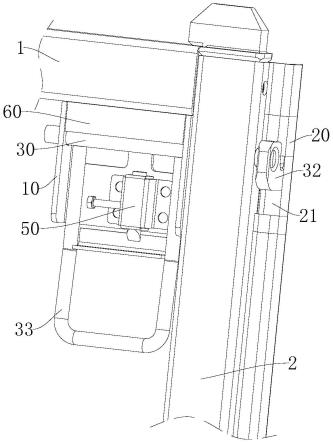
1.一种基于腱鞘驱动的医用上肢辅助外骨骼,其特征在于:包括t形背架板(1)、左臂总成(3)、右臂总成(2)、控制机构和腱鞘系统(5);所述左臂总成(3)和右臂总成(2)对称布置在t形背架板(1)前侧面的上端部,形成上肢辅助外骨骼;所述控制机构设于控制箱(4)内,且控制箱(4)固定安装在t形背架板(1)后侧面的下部,并用于控制腱鞘系统(5)作用于左臂总成(3)和右臂总成(2);所述左臂总成(3)和右臂总成(2)的结构相同,且包括小臂(21)、大臂(23)和水平布置的l形肩部连杆(25),t形背架板(1)的水平板两端分别连接有合页铰链(27);所述小臂(21)、大臂(23)、肩部连杆(25)和合页铰链(27)通过第一关节机构(22)、第二关节机构(24)和第三关节机构(26)依次连接;所述第一关节机构(22)、第二关节机构(24)和第三关节机构(26)的结构相同,包括转动基座(31)和转动体(32),转动体(32)包括鼓部(321)和手柄部(322),鼓部(321)和转动基座(31)通过轴承机构转动连接,鼓部(321)的外侧圆周上开设有线槽;所述小臂(21)包括小臂连接管(211),大臂(23)包括大臂连接管(231),小臂连接管(211)和大臂连接管(231)的内侧面上设有至少一个可伸缩的绑环,所述第一关节机构(22)的手柄部(322)和小臂连接管(211)对应端连接,第一关节机构(22)的转动基座(31)和大臂连接管(231)对应端连接,大臂连接管(231)另一端和第二关节机构(24)的手柄部(322)连接,第二关节机构(24)的转动基座(31)和肩部连杆(25)对应端连接,肩部连杆(25)另一端和第三关节机构(26)的手柄部(322)连接,第三关节机构(26)的转动基座(31)和合页铰链(27)的一页连接;所述控制机构包括控制器(81)、蓄电池(82)和电机模组,控制器(81)和蓄电池(82)布置在所述控制箱(4)的底部,电机模组包括电机驱动器(831)、电机(832)、滚珠丝杠螺母副(833)和滑轨(834),电机驱动器(831)固定安装在电机(832)的电机壳端部,电机(832)的电机轴、滚珠丝杠螺母副(833)的丝杠和滑轨(834)平行布置,电机轴和丝杠通过带传动机构(85)同步转动;滚珠丝杠螺母副(833)的螺母座上端通过滑块(835)滑动配合设于滑轨(834)上;所述腱鞘系统(5)包括水平布置的方形连接板(51)、6个并排布置的压紧机构、轮轴(52)和6根柔索(53),方形连接板(51)、轮轴(52)和6个压紧机构布置在控制箱(4)内;所述方形连接板(51)的上端和螺母座的下端固定连接,且方形连接板(51)的宽度方向和滑轨平行;每个压紧机构包括第一压板(541)、第二压板(542)和滑轮(543),第一压板(541)和第二压板(542)为横向平行布置的直立板,第一压板(541)和第二压板(542)相对侧面通过波浪形相互啮合为一对压紧面,滑轮(543)直立布置在一对压紧面的下方;6个压紧机构的6个第一压板(541)并排固定在方形连接板(51)的下底面,且每个第一压板(541)长度方向和方形连接板(51)长度方向一致,每个第二压板(542)的两端固定在控制箱(4)相对的侧板上,6个滑轮(543)套装在轮轴(52)上,轮轴(52)平行方形连接板(51)宽度方向布置,柔索、滑轮(543)、每对压紧面和鼓部(321)一一对应,使得每根柔索绕过滑轮(543)下
端,柔索的两端向上经过一对压紧面,然后穿出控制箱(4)的上盖板,最后绕经鼓部(321)的线槽,并通过线卡固定在线槽上;位于控制箱(4)和鼓部(321)之间的每根柔索(53)外均套装有鲍登线鞘体(537);工作时,通过绑带将t形背架板(1)固定在人体背部,并通过伸缩绑环将左臂总成(3)和右臂总成(2)穿戴在人体左臂和人体右臂上,脚踏板开关(9)通过控制控制器(81)实现对电机(832)的控制,电机(832)转动带动方形连接板(51)移动,使得每对压紧面压紧或松开对应的柔索,实现约束第一关节机构(22)、第二关节机构(24)和第三关节机构(26)的转动自由度,对人体左臂和人体右臂提供有力的支撑。2.根据权利要求1所述一种基于腱鞘驱动的医用上肢辅助外骨骼,其特征在于:所述控制机构还包括光电光电限位机构(84)(84),光电限位机构(84)(84)包括一对槽形光电开关(841)和u形的遮光片(842),一对槽形光电开关(841)通过倒立的一对l形支板(843)间隔安装在滑轨(834)的一侧面,遮光片(842)通过支板安装在所述螺母座的对应侧面,螺母座移动带动遮光片(842)移动,使得遮光片(842)单向移动时,实现遮光片(842)的一侧板经过同方向的槽形光电开关的槽口。3.根据权利要求1所述一种基于腱鞘驱动的医用上肢辅助外骨骼,其特征在于:所述带传动机构(85)包括第一轴承座(851)、第二轴承座(852)、第一带轮(853)、第二带轮(854)和惰轮(855),第一轴承座(851)和第二轴承座(852)对应安装在所述控制箱(4)内相对两侧,丝杠转动安装在第一轴承座(851)和第二轴承座(852)之间,电机(832)的电机轴转动安装在第一轴承座(851)上,且电机轴伸出第一轴承座(851)的一端安装所述第一带轮(853),丝杠伸出第一轴承座(851)的一端安装所述第二带轮(854),且第一带轮(853)和第二带轮(854)通过同步带传动,所述惰轮(855)安装在同步带下端的外侧对应的第一轴承座(851)上,用于张紧同步带。4.根据权利要求1所述一种基于腱鞘驱动的医用上肢辅助外骨骼,其特征在于:所述小臂连接管(211)、大臂连接管(231)和肩部连杆(25)均为矩形钢管;每根手柄部(322)均为矩形杆;所述小臂连接管(211)和第一关节机构(22)的手柄部(322)插接并通过螺纹固定形成伸缩杆,第一关节机构(22)的转动基座(31)和大臂连接管(231)对应端固定连接,大臂连接管(231)另一端部和第二关节机构(24)的手柄部(322)插接并通过螺纹固定形成伸缩杆,第二关节机构(24)的转动基座(31)和肩部连杆(25)对应端固定连接,肩部连杆(25)的另一端部和第三关节机构(26)的手柄部(322)插接并通过螺纹固定形成伸缩杆,第三关节机构(26)的转动基座(31)和合页铰链(27)的另一页固定连接。5.根据权利要求4所述一种基于腱鞘驱动的医用上肢辅助外骨骼,其特征在于:所述小臂连接管(211)的内侧面上设有腕伸缩绑环(212)和肘伸缩绑环(213),大臂连接管(231)的内侧面上设有大臂伸缩绑环(232),且腕伸缩绑环(212)、肘伸缩绑环(213)和大臂伸缩绑环(232)的结构相同,包括上托架、下托架和伸缩绑带,上托架和下托架为同圆弧上的不同弧段,且上托架的下端和对应的矩形钢管的上端固定连接,下托架的上端和对应的矩形钢管的下端固定连接,上托架和下托架的悬伸端上对应开设有一对矩形孔,伸缩绑带的两端固定在对应一对矩形孔上。6.根据权利要求1所述一种基于腱鞘驱动的医用上肢辅助外骨骼,其特征在于:每个所
述转动基座(31)包括直立的一对安装板(311)和直立的固定块(312),一对安装板(311)的一端固定在固定块(312)的一侧面上;第一关节机构(22)的安装块(312)的另一侧面上开设有插槽,插槽内固定插接所述大臂连接管(231)的对应端,第二关节机构(24)的安装块(312)的另一侧面上开设有插槽,插槽内固定插接所述肩部连杆(25)的对应端,第三关节机构(26)的安装块(312)和合页铰链(27)的一页固定连接;每个所述轴承机构包括轴承(331)、一对垫片(332)和螺栓(333);每个所述转动体(32)的鼓部(321)中间开设有安装孔,鼓部(321)位于一对安装板(311)之间,使得轴承(331)配合位于安装孔内,一对垫片(332)设于轴承(331)的两端,螺栓(333)穿过一对安装板(311)将鼓部(321)转动安装。7.根据权利要求6所述一种基于腱鞘驱动的医用上肢辅助外骨骼,其特征在于:每个所述安装块(312)的上、下端对开设有一对线孔,每个鼓部(321)和手柄部(322)连接处的中部开设有方孔,柔索(53)的两端分别穿过一对线孔,绕经对应鼓部(321)的线槽内,并分别通过线卡卡接于对应方孔内。8.根据权利要求1所述一种基于腱鞘驱动的医用上肢辅助外骨骼,其特征在于:所述6根柔索分别为第一柔索(531)、第二柔索(532)、第三柔索(533)、第四柔索(534)、第五柔索(535)和第六柔索(536);第一柔索(531)、第二柔索(532)、第三柔索(533)、第四柔索(534)、第五柔索(535)和第六柔索(536)在控制箱内依次并列布置,使得第一柔索(531)的两端、第二柔索(532)的两端、第三柔索(533)的两端、第四柔索(534)的两端、第五柔索(535)的两端和第六柔索(536)的两端从控制箱(4)的上盖板从右至左依次穿出,实现第一柔索(531)、第二柔索(532)、第三柔索(533)依次绕经右臂总成的第一关节机构(22)的鼓部(321)、第二关节机构(24)的鼓部(321)和第三关节机构(26)的鼓部(321);第四柔索(534)的两端、第五柔索(535)的两端和第六柔索(536)依次绕经左臂总成的第一关节机构(22)的鼓部(321)、第二关节机构(24)的鼓部(321)和第三关节机构(26)的鼓部(321)。9.根据权利要求1所述一种基于腱鞘驱动的医用上肢辅助外骨骼,其特征在于:所述控制箱(4)的底部为一体成型且带矩形凹槽的箱底,控制箱(4)的侧板分别均匀开设有散热条孔,所述轮轴(52)平行于控制箱(4)的长度方向安装在箱底的上端,且轮轴(52)一端对应的控制箱(4)侧板上设有轴承盖,防止轮轴(52)发生轴向窜动。10.根据权利要求1所述一种基于腱鞘驱动的医用上肢辅助外骨骼,其特征在于:所述t形背架板(1)的竖直部为一对竖板,且一对竖板下端固定设有腰部绑带(6),一对竖板上端设有一对肩绑带(7)。
技术总结
本发明属于机器人领域,具体涉及一种基于腱鞘驱动的医用上肢辅助外骨骼。包括T形背架板、左臂总成、右臂总成、控制机构和腱鞘系统;左臂总成和右臂总成均包括小臂、大臂和水平布置的L形肩部连杆;小臂、大臂、肩部连杆和合页铰链通过第一关节机构、第二关节机构和第三关节机构依次连接;控制机构包括控制器、蓄电池和电机模组,腱鞘系统包括方形连接板、6个并排布置的压紧机构、轮轴和6根柔索,上肢辅助外骨骼穿戴在人体左臂和人体右臂上,脚踏板开关通过控制控制器实现对电机的控制,使得每对压紧面压紧或松开对应的柔索,实现约束第一关节机构、第二关节机构和第三关节机构的转动自由度,对人体左臂和人体右臂提供有力的支撑。对人体左臂和人体右臂提供有力的支撑。对人体左臂和人体右臂提供有力的支撑。
技术研发人员:王正雨 宋文军 于翔 王井佑 朱莹莹 刘春景
受保护的技术使用者:安徽索骥智能科技有限公司
技术研发日:2022.11.14
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。